声纳性能对ATT 武器系统效能影响的仿真分析
2019-11-06 08:41何跃峰
火力与指挥控制 2019年9期
何跃峰
(江苏自动化研究所,江苏 连云港 222061)
0 引言
现代鱼雷武器飞速发展,水面舰艇很难通过改变航向、航速和利用声诱饵等手段来摆脱鱼雷的攻击,对水面舰艇的威胁主要体现在以下方面:
1)航程远、毁伤威力大。目前先进的鱼雷如MK48 等,航速不小于50 kn,航程不小于50 km,采用线导导引模式,可较远距离发起攻击。一条重型鱼雷即可击沉或重创一艘大中型水面舰艇。
2)制导方式较先进。潜射鱼雷具备多种导引方式,如线导+尾流自导/尾流自导、线导+主/被动声自导/主被动声自导、直航,并且智能化程度高的鱼雷还具备根据战场态势实时转换制导方式的能力。
3)智能化程度高,抗干扰能力强。随着鱼雷智能化水平的发展,其信号处理能力不断提高,对声诱饵等水声器材的抗诱骗性不断提高,识别/追踪水面舰艇目标的能力越来越强。
4)攻击隐蔽性好。国外先进鱼雷通过控制作战环节中的噪声,基本实现了作战全过程的隐蔽性,即自航出管、低噪声航行、中远程被动声自导探测。舰艇报警声纳对其探测距离近,鱼雷防御时间短。
从鱼雷防御体系构建的现状及发展看,反鱼雷手段主要包括软对抗和硬杀伤。随着鱼雷技术的发展,声抗器材不能防御直航、尾流自导来袭鱼雷,主要用于诱骗声自导鱼雷和干扰敌潜艇导引。随着来袭鱼雷对抗水平不断提高,来袭鱼雷识别声抗器材能力大大增强,进一步削弱了反鱼雷系统的软对抗体制对抗效果,这增加了舰艇面临(二次)威胁的几率。而“硬杀伤”防御武器可直接摧毁声自导、尾流自导、直航等各种来袭鱼雷,基本不受鱼雷智能化水平影响,拦截成功即可消除该来袭鱼雷对本舰的威胁,已成为未来鱼雷防御的主要发展方向。
反鱼雷鱼雷(Anti-Torpedo Torpedo,ATT)属“硬杀伤”鱼雷防御装备中精准拦截武器,具有拦截对象多(可拦截声自导、尾流自导、直航等各种工作方式鱼雷)、自主作战能力强、作战效能高等特点,已经受到各军事强国的重视。美国于20 世纪80 年代初研制出反鱼雷鱼雷样雷,并进行了海上试验,目前美国第三代反鱼雷对抗系统(SSTD)计划中,广泛开展反鱼雷鱼雷等硬杀伤武器的研究。俄罗斯研制了“帕科特-Э/НК”反鱼雷鱼雷武器系统,几乎可以装备任何排量的水面作战舰艇。据报道,该系统可使舰艇的生存能力提高3~3.5 倍。德国海军在研发廉价反潜武器(LCAW)的基础上推出“海蜘蛛”反鱼雷鱼雷。采用水下火箭推进系统作为主推进动力,可高速攻击来袭鱼雷。
1 ATT 武器系统
反鱼雷鱼雷主要包括:战雷段、自导头段、燃料仓段、动力舱段、控制段。按其功能可分为自导系统、战斗部及引信系统、控制系统、全雷电路及供电系统、动力系统、壳体结构系统[1],作为一种鱼雷防御体系结构中内层防御武器,它既能主动发射脉冲信号去探测来袭鱼雷,也可以采用被动接收来袭鱼雷航行过程中产生的噪音或发射的脉冲信号发现目标[2]。当反鱼雷鱼雷与来袭鱼雷相对运动至其引信作用区域内,通过引信设定引爆反鱼雷鱼雷,用以毁伤来袭鱼雷内的仪表及探测设施,使来袭鱼雷失灵,进而丧失攻击能力,达到确保水面舰艇安全的目的。
ATT 武器系统一般由鱼雷预警及探测设备、火控设备、发射装置及武器组成。火控设备综合处理战场态势信息,辅助指挥员指挥决策,并据此进行火控解算,将拦截参数设定至ATT。当指挥员下达发射命令后,由发射装置完成武器出管,ATT 按照设定的拦截参数航行至预定位置后开启自导装置,当其接近到来袭鱼雷一定距离时进行自爆,或摧毁来袭鱼雷,或使其自导、控制系统功能失效。反鱼雷鱼雷武器系统配置图见图1。

图1 反鱼雷鱼雷系统配置图
作为“点对点”精确拦截的鱼雷防御武器,声纳对来袭鱼雷目标的探测性能会影响武器系统对于目标定位的快速性和准确性,进而影响鱼雷防御作战的时机和效能。
1.1 鱼雷防御时机窗口进一步缩短
受战场态势的紧迫性和水下信息的模糊性影响,水面舰艇目前很难实现对来袭鱼雷距离、航向、航速等运动要素的精确求解。现代鱼雷隐蔽攻击能力强,一般只能通过水声探测手段实现鱼雷报警,鱼雷报警声纳对鱼雷的识别能力较弱,识别时间较长,导致鱼雷报警距离较近;报警声纳主动探测方式可实现对来袭鱼雷的精确定位,不但能够获得鱼雷方位信息,还能获得鱼雷防御决策中最为需要的距离信息,但由于鱼雷雷体反射强度小,主动探测距离往往很近,尚只能用于近程报警情形,同时,由于军事科技的飞速发展,鱼雷航速越来越高,鱼雷防御作战时机窗口进一步缩短,这就对武器系统提出了更短反应时间的要求。
1.2 系统对于鱼雷目标的定位精度有待提高
水面舰艇只有利用鱼雷航行辐射噪声才具备较远距离上探测鱼雷的可能,而且只能获得鱼雷方位信息,对鱼雷距离、航向、航速等弹道信息只能通过估测求取,尽管理论上可以采取类似潜艇解算目标运动要素时的纯方位法推导来袭鱼雷距离、航速和航向等要素信息,但鱼雷防御态势的紧迫性往往无法给出充裕的解算时间。因此,系统的解算精度在一定程度上很难满足反鱼雷鱼雷武器快速准确拦截的需求。只有进一步采用新方法、新思路,增加声纳探测信息利用率,提升系统对鱼雷的定位能力,提高拦截精度,进而增强系统水下防御作战能力。
2 ATT 迎面拦截模型
文献[3-4]研究了反鱼雷鱼雷采用迎面逆弹道拦截和直接拦截两种方案下发现概率的影响,研究结果表明在大多数态势下,从武器系统发现概率层面考虑,采用迎面逆弹道拦截方式要明显优于直接拦截方式。本文以ATT 迎面拦截方式为例,探讨声纳性能对系统效能的影响。
假设舰艇探测设备在4 km~8 km 的距离处发现来袭鱼雷并报警,其已经完成机动段弹道,以固定提前角方式攻击舰艇。舰艇发射反鱼雷鱼雷采用迎面拦截方式对其实施拦截,迎面拦截弹道就是在火控系统解算出来袭鱼雷攻击弹道后,将反鱼雷鱼雷发射到来袭鱼雷未来弹道航路上的某一点,使ATT 转向沿着与来袭鱼雷相反的方向逆向航行实施拦截。逆弹道拦截的方式类似于潜射尾流自导鱼雷的折线攻击(带角攻击)情形,不但需要考虑到一次转角和展开航程段,也考虑到二次转角。
如图2 所示,以舰艇发射反鱼雷鱼雷时的位置为坐标原点,以正北航向为Y 轴,正东方向为X 轴建立直角坐标系。我舰以速度Vw,航向Cw运动,此刻目标位于M 点,与本舰的水平距离为Dm(不考虑海深等因素),以速度Vm,航向Cm向本舰运动,反鱼雷鱼雷航速为Vt,旋回半径为R。反鱼雷鱼雷出管后经过一系列的机动和直航到达来袭鱼雷航向线的正前方与来袭鱼雷做相向运动,S 为舰艇在ATT命中来袭鱼雷时的位置。
反鱼雷鱼雷直航段弹道模型
X(t+1)=X(t)+Vt*sin(Ct)*Δt;
Y(t+1)=Y(t)+Vt*cos(Ct)*Δt;
式中,Ct为反鱼雷鱼雷实时航向,Δt 为直航时间。
转角段弹道模型
X(t+1)=X(t)±R*(cos(Ct1)-cos(Ct0));
Y(t+1)=Y(t)±R*(sin(Ct1)-sin(Ct0));
式中,Ct0、Ct1 为反鱼雷鱼雷实时变化航向。
根据上式及反鱼雷鱼雷与来袭鱼雷相对运动关系递推,可以得到反鱼雷鱼雷转角的函数关系式及拦截参数。
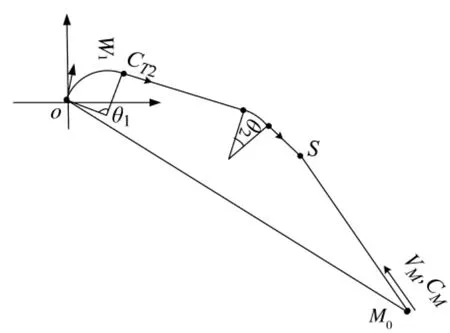
图2 反鱼雷鱼雷迎面拦截弹道图示
3 武器系统效能仿真模型

追踪概率是鱼雷自导发现目标后,在追踪目标过程中,能追上并命中目标的概率,计算追踪概率时需要考虑以下几点因素:
鱼雷的剩余航程要大于追踪航程;
弹道曲率半径要大于鱼雷最小旋回半径;如果尾追导引方式下采用固定提前角弹道则可以不考虑该因素。
自导发现目标时的距离应足以使鱼雷自修正航行轨迹。
导引误差不能大于目标的命中面积。
则对于目标,鱼雷的命中概率:
P=Pv×Pv×Ph
由于潜射来袭鱼雷射程一般较远(20 km 左右),当本舰的鱼雷报警声纳发现来袭鱼雷时,来袭鱼雷基本上可以认为已经完成了前期的机动动作(多次转角等),此时可认为其处于近似直航状态。本次采用蒙特卡罗法,主要对系统发现概率进行仿真计算。在ATT 完成二次转角后自导开机,反鱼雷鱼雷直航,对ATT 及来袭鱼雷目标实时推算仿真,进而计算ATT 的捕获概率。
判定捕获成功的条件如下:
ATT 当前航程大于最小开机距离;
ATT 当前航程小于最大射程;
ATT 当前处于反鱼雷鱼雷水平自导扇面中。
4 仿真条件及分析

由计算机系统设置目标航路理论值,并根据误差水平随机模拟声纳探测误差,将带误差的航路参数按照声纳探测周期发送至反鱼雷鱼雷火控系统进行滤波,拦截参数解算,并采用蒙特卡罗法对反鱼雷鱼雷发现概率进行仿真,统计反鱼雷鱼雷的发现概率。仿真流程见图3。主要从声纳探测的距离误差、方位误差、鱼雷报警距离仿真计算反鱼雷鱼雷的发现概率,进而分析其对反鱼雷鱼雷发现概率的影响。
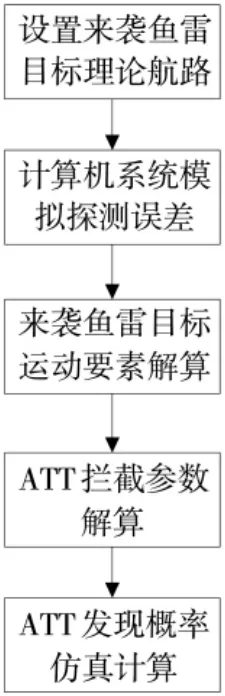
图3 仿真流程设计
4.1 测距误差对作战效能的影响
其他初始条件均保持不变的前提下,通过调整声纳测距指标对反鱼雷鱼雷发现概率进行仿真。某态势下,声纳不同测距误差及对应的发现概率见图4。
从仿真结果来看,在声纳初始报警距离、声纳测向误差一定的情况下,随着时间的累积,反鱼雷鱼雷的发现概率均处于一个平滑的上升阶段。随着声纳探测目标的点数增多,对于鱼雷目标的运动要素解算越来越精确,所以发现概率会相应地提高;但是,对与声纳测距水平1.0 D%和1.5 D%对应的两条发现概率曲线基本重合,从仿真结果来看,声纳测距误差对ATT 迎面拦截方式下的发现概率影响不大。
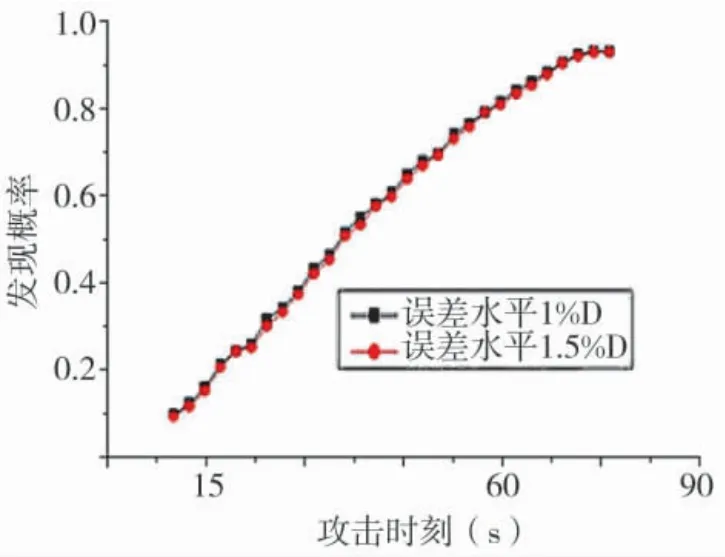
图4 声纳不同测距误差对发现概率的影响
4.2 测向误差对作战效能的影响
其他初始条件均保持不变的前提下,分别对声纳测向误差分为3.0°,2.5°,2.0°,1.5°,1.0°共5 档进行全航路发现概率仿真,某态势下,声纳不同测向误差及对应的发现概率见图5。
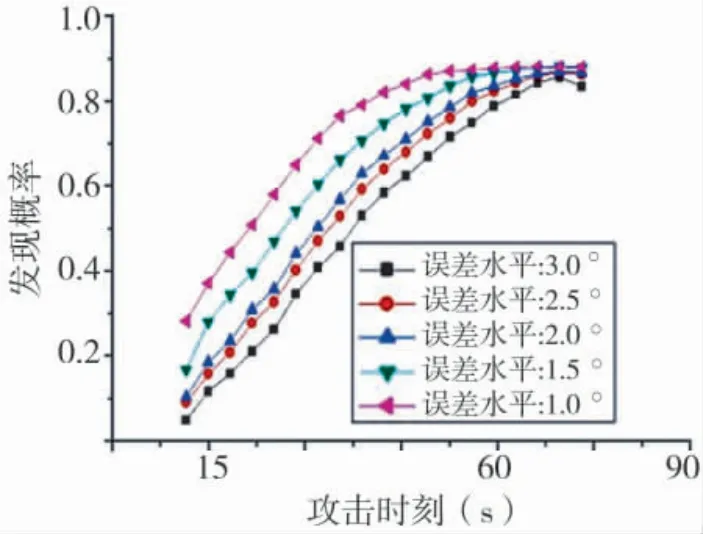
图5 声纳不同测向误差对发现概率的影响
从仿真结果来看,在声纳初始报警距离、声纳测距误差一定的情况下,随着时间的累积,反鱼雷鱼雷的发现概率均处于一个平滑的上升阶段。但是,通过对测距二阶原点距对这5 种不同测向误差对应的发现概率曲线进行比较发现,在一定的反应时间内(从报警声纳发现来袭鱼雷到发射反鱼雷鱼雷拦截),提高测向精度对反鱼雷鱼雷发现概率的帮助较明显,但是随着时间的累积,声纳目标的点数增多,武器系统对于鱼雷目标的运动要素解算的精度受探测误差的影响逐渐减小,ATT 拦截参数精度逐步提高,其发现概率会相应地提高,但是不同测向误差对应的发现概率差别不大,不同测向精度对应的发现概率差别不再特别明显。
4.3 报警距离对ATT 作战效能的影响及分析
鱼雷报警距离远近是能否成功对抗的关键,若鱼雷的报警距离足够远,只进行舰艇机动,高速驶出鱼雷自导搜索带即可。使用对抗手段时,对鱼雷的探测距离应保证水面舰艇有足够的时间进行拦截、对抗。
在声纳其他条件不变的情况下,报警距离分为8 km、7 km、6 km、5 km、4 km,5 档进行全航路发现概率仿真。某态势下,声纳不同测距误差及对应的发现概率见图6。
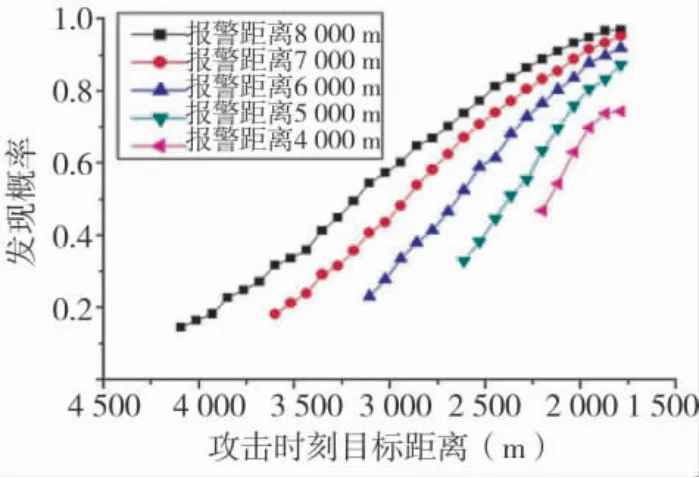
图6 声纳不同报警距离及对应的发现概率
从以上仿真结果来看,反鱼雷鱼雷武器性能对发现概率的影响如下:
随着时间的累积,反鱼雷鱼雷的发现概率均处于一个平滑的上升阶段;随着声纳报警作用距离的增加,反鱼雷鱼雷在目标相同距离处实施拦截的拦截概率会有较大幅度提高,并且可以增大拦截来袭鱼雷的时机区间。
5 结论
增加声纳报警距离,提高声纳测向精度、提高声纳测距精度都能提高反鱼雷鱼雷的发现概率。尤其是在发现来袭鱼雷后的一段时间内,增加声纳的报警作用距离以及提高声纳的测向精度,对于提高反鱼雷鱼雷发现概率作用较为明显,而提高测距误差对提高反鱼雷鱼雷发现概率作用相对较小。从原理上分析也可得到结论:在反鱼雷鱼雷使用迎面方式对来袭鱼雷进行拦截时,只要反鱼雷鱼雷在合适的时机转到来袭鱼雷的逆航向上,来袭鱼雷测距的误差可通过逆航向上继续直航得到补偿。
本文基于反鱼雷鱼雷迎面拦截方式建立了反鱼雷鱼雷的运动模型及效能评估模型,仿真了基于声纳重点指标的反鱼雷鱼雷发现概率,并分析了声纳不同测距、测向误差以及声纳报警作用距离对反鱼雷鱼雷发现概率的影响,得出了一系列有意义的结论。但本文的讨论是基于单一平面的,即来袭鱼雷和反鱼雷鱼雷处于在同一平面内运动,而实际情况中,两雷的运动应当是空间的,本文所建立的运动模型只是实际情况的近似。要更深入研究反鱼雷鱼雷的弹道和拦截概率问题,就必须建立空间的多维运动模型,这一问题还有待进一步研究。
猜你喜欢
导航定位学报(2022年4期)2022-08-15
电子技术与软件工程(2022年9期)2022-07-09
小哥白尼(军事科学)(2021年8期)2021-11-22
火力与指挥控制(2021年8期)2021-09-08
少儿科技(2021年4期)2021-01-11
考试与评价·八年级版(2020年5期)2020-10-29
兵器知识(2020年2期)2020-03-20
文萃报·周二版(2019年46期)2019-09-10
电子制作(2019年24期)2019-02-23
电子制作(2019年24期)2019-02-23