控制受限欠驱动桥吊系统改性终端滑模控制
2019-11-07 07:35强宝民何祯鑫杜文正
兵器装备工程学报 2019年10期
王 杰,强宝民,何祯鑫,杜文正
(火箭军工程大学 导弹工程学院, 西安 710025)
桥吊作为一种常见的欠驱动设备,在工业生产中有广泛的应用。直观地讲,所谓欠驱动系统,是指系统的控制输入变量个数小于系统自由度的一类非线性系统,在生产实践中很多设备都具有欠驱动的形式,由于去掉系统部分驱动器,增加了系统自由度,提高了系统灵活性,使得欠驱动系统在节约能源、降低价格、增强系统适应性等方面都比全驱动系统优越。在桥吊系统中,由于非直接控制的摆动自由度的存在,使得其动力学特性与耦合性相比全驱动系统更为复杂,给系统的稳定控制带来了难度。因此对欠驱动非线性桥吊系统的防摆研究,不论对于控制理论的完善,还是实际工业生产都有极为重要的意义。
近年来,国内外学者针对桥吊系统的控制问题开展了很多研究工作,主要控制模式分为开环和闭环控制。具体而言,主要控制方法有输入整形[1]、LQR[2]、PID[3]、部分反馈线性化[4]、最优控制[5]、能量方法[6]、分级控制[7]以及智能控制[8]等等。这些控制方法在理想条件下均能够取得很好的控制效果,但是在工业生产中,由于大量的外界扰动、参数摄动以及风载荷、摩擦力的存在,采用传统的控制方法无法保证系统的稳定性以及对干扰的鲁棒性,滑模控制隶属于变结构控制(Variable Structure Control,VSC),本质上是一种特殊的非线性控制,其非线性表现在控制的高频切换性(即抖振)。滑模控制与其他控制方法最大的区别在于其系统结构具有时变的特点,处于动态过程的系统结构,根据当前的系统状态(如误差,误差变化率等)有目的地进行变化,迫使系统按照设计的“滑动模态”状态轨迹运动。由于滑动模态可以根据控制目的进行设计且与对象参数以及外界扰动无关,使得滑模控制在系统稳定性、对干扰的鲁棒性、无需在线辨识以及快速动态响应等方面有独特的优势,广泛应用于非线性系统以及不确定系统的控制研究。在桥吊控制领域,相比传统的控制方法,滑模变结构控制能够满足桥吊系统准确定位、快速消摆的控制要求,特别在有强干扰、强风载存在的环境下,能够保持良好的控制品质。
与传统线性滑模(Line Sliding Mode,LSM)不同,终端滑模(Terminal Sliding Mode,TSM)以其动态响应快、有限时间收敛、稳态跟踪精度高等优点,得到了科研人员的广泛关注。终端滑模通过吸引子函数构造非线性滑模面,能够使得系统状态在有限时间内达到平衡状态,但在系统状态远离平衡点时,状态收敛速度会远低于线性滑模,为了解决这一问题,在文献[9]中Keleher通过优化吸引子函数提出了快速终端滑模(Fast Terminal Sliding Mode,FTSM)控制,实现了系统状态快速、准确收敛到平衡状态。
在运动控制领域,执行器往往会发生饱和现象,如船舶的偏航摆舵系统,舵机的最大偏角限制等。这使得过大的控制律难以实现,该问题在某种程度上会影响系统的控制稳定性,甚至会引起系统失稳。作者通过定义自适应辅助分析系统,采用输入饱和误差动态放大的方法,实现了一种基于控制输入抗饱和的滑模控制方法,解决了桥吊系统的控制受限问题。
基于以上分析,本文针对桥吊系统的控制受限问题,设计了一种控制受限改性终端滑模控制(Control Limited Improved Terminal Sliding Mode,CLITSM)方法,其设计过程分为4个部分:1)通过综合TSM与FTSM终端吸引子的优点,设计了一种改性终端滑模控制,实现了系统状态较快速终端滑模有更快的收敛速度;2)针对执行器的饱和现象,在系统输入端添加稳定的自适应抗饱和补偿器,实现了控制输入限幅;3)采用分层滑模控制,分别针对位移子系统和摆角子系统设计第一层改性终端滑模面,保证子系统有限时间收敛,之后线性组合为第二层滑模面。通过Lyapunov法分别求取等效控制量和切换控制量,并进行稳定性分析;4)在文献[10]的基础上设计了一种非线性趋近律,应用于桥吊系统的防摆控制,大幅削弱了控制抖振问题。将本文的方法应用于桥吊系统控制,仿真结果表明,桥吊系统能够在输入受限情况下实现系统状态快速收敛,对外界干扰具有强鲁棒性能。
1 问题描述
对于常见的二维定绳长桥吊系统,定义M,m分别为台车和负载的质量,l为吊绳长度,u(t)为控制输入,x为台车相对原点的位移,θ为负载相对铅垂方向的偏角,fr为轨道摩擦力,采用欧拉-拉格朗日方法建模如下:
(1)
(2)

(3)

(4)
对于桥吊系统而言,控制器的控制目标进而可以明确为:
存在有限时间tr,使得任意t≥tr均满足
(5)
2 改性终端滑模收敛性分析
采用分层滑模控制方法,将欠驱动桥吊系统分为两个带干扰二阶非线性子系统A和B:
(6)

(7)

考虑LSM、TSM和FTSM的一阶方程形式:
(8)
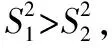
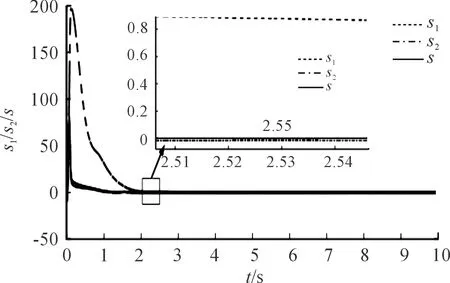
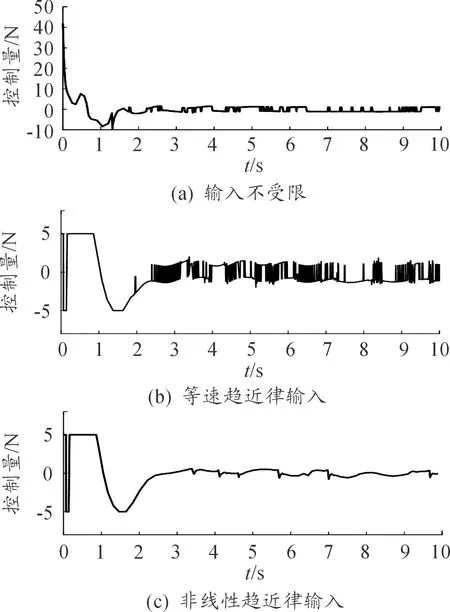
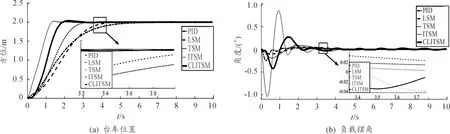
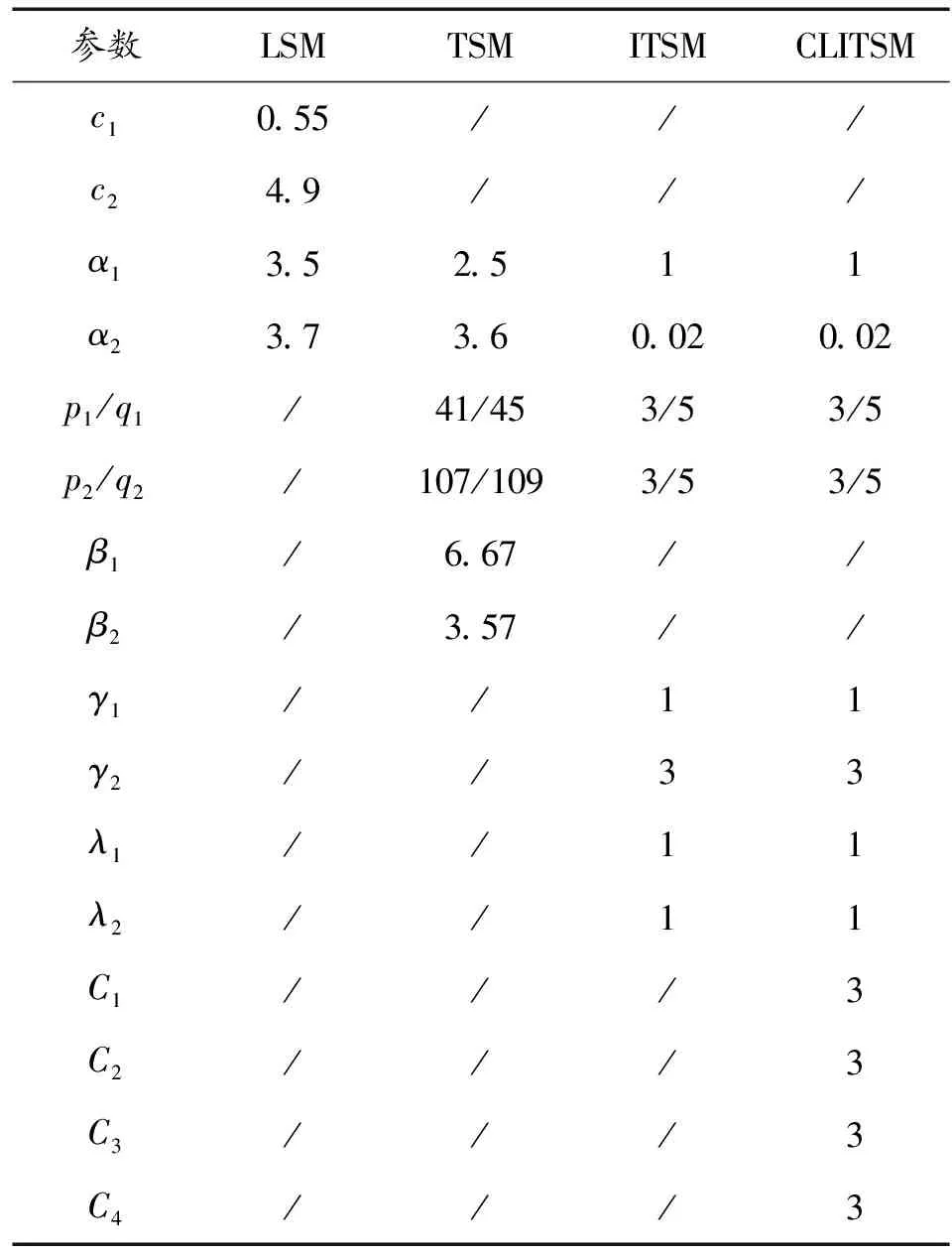
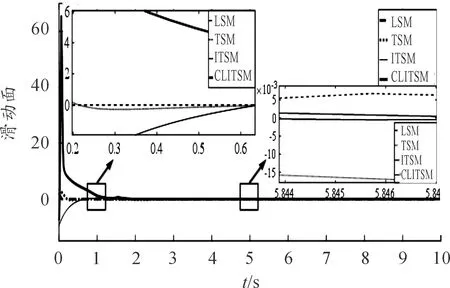
其中p 当系统状态在有限时间内达到平衡状态时,(8)所示滑模面终端子函数为: (9) 由式(9)可见,终端滑模较线性滑模有更快的收敛速度,快速终端滑模控制方法在当系统状态接近平衡点时终端子函数主要由e决定,较终端滑模改善并提高了系统误差接近零点时的收敛速度。通过优化快速终端滑模终端子函数构成,并提高桥吊两子系统的耦合性,本文设计了一种新型改性终端滑模控制(Improved Terminal Sliding Mode,ITSM): (10) 其中γ,λ为正实数,τ>1。 利用文献[11]引理,推导ITSM有限时间收敛性: 引理1:如果连续函数V是正定的且满足如下条件: (11) 其中Δ为正系数,0<χ<1。则函数V能在任意给定t0到达原点,且收敛时间满足: tR≤t0+V1-χ(t0)/Δ(1-χ) (12) 引理2:针对桥吊系统改性终端滑模控制,终端吸引子满足: (13) 分层滑模控制流程简图如图1,通过事先设定控制目标利用双层滑模对位移、摆角子系统以及总滑模面进行稳定控制。 根据式(10)所示滑模面,利用等效控制求取等效控制量: (14) (15) 图1 分层ITSM控制流程简图 为了保证包含两个子系统的总系统稳定,需要设计构造第二层滑模面: S=α1s1+α2s2 (16) 其中α1,α2为严格正实数。为保证子系统能够到达第一层滑模面,利用Lyapunov函数和准滑动模态设计方法设计系统总输入为: u=ueq1+ueq2+usw (17) 为了获得整个系统的控制输入量,需要确定切换控制部分。对基于分层滑模控制方法的变结构控制器而言,系统第二级滑动面的稳定性保证了变结构控制系统的整体稳定性,因此切换控制量的选取应使如下所示的滑模到达条件成立: (18) 采用等速趋近律求解滑模控制器的切换控制量: (19) 其中,κ为严格正实数,且κ=l+ψ,ψ>0。 由式(14)-式(19)可得改性终端滑模控制器切换控制量: (20) 则采用等速趋近律的桥吊系统控制输入为: u=ueq1+ueq2+usw= (21) 由式(20)所示,整个起重机系统的控制输入量中含有符号函数这一不连续项,该不连续项的存在将导致变结构系统出现高频抖振现象,且系统的抖振程度取决于系统参数的大小。为获得较短的稳定时间和鲁棒性,需要选择较大的控制器增益,这会导致系统的大幅高频抖振,为解决系统抖振与控制效益的矛盾,本文在文献[10]的基础上提出了式(22)所示非线性趋近律: (22) (23) 其中 (24) 假定被控对象为式(6)所示的子系统A,取最大输入值umax,umax>0,Δu=u-υ,u=sat(υ),则此时饱和控制输入表示为: (25) 通过定义辅助分析系统,采用饱和误差动态放大的方法,可实现一种基于控制输入饱和的滑模控制,闭环系统示意图如图2。 图2 控制受限闭环控制系统示意图 通过设计稳定的自适应辅助系统,实现控制饱和的补偿[12]: (26) 写成矩阵形式: (27) 重新定义误差函数: e1(t)=x1-x1d-ρ1 e3(t)=x3-x3d-ρ1 (28) 则有: (29) 将式(28),式(29)代入改性终端滑模控制式(10)并求导得: (30) (31) (32) 采用(24)所示切换控制量,得到输入受限改性终端滑模控制律: (33) 稳定性定理一:对于二维定绳长桥吊系统,若采用式(10)所示设计子系统滑模面,式(16)所示总滑模面,并采用式(33)所示总滑模控制量,则整个桥式起重机系统的滑模面S是渐进稳定的。 证明:构造Lyapunov能量函数 (34) (35) κ<κ/Q(S)<κ/p (36) 由式(35),式(36)可得 (37) 对式(37)进行积分运算,进一步有 (38) 进而 (39) (40) 稳定性定理二:对于二维定绳长桥吊系统,若采用式(10)所示设计子系统滑模面,式(16)所示总滑模面,并采用式(33)所示总滑模控制量,则各子滑模面S也渐进稳定。 证明:由式(38)得到: (41) 即总滑模面为绝对可积,构造两个滑模面: (42) (43) 进而有 (44) 由式(40),式(43)可知 (45) 从而得出: (46) 有限时间收敛定理:对于表示二维定绳长桥吊系统模型的式(3),若采用式(10)所示设计子系统滑模面,采用式(14),式(15)所示等效控制量,则系统能够在有限时间内收敛到达滑模状态。 证明:为了计算简便,以下证明过程中趋近律均采用式(19)等速趋近律,对于式(22)非线性趋近律证明类似,此处不多赘述。 由式(37)得到式(3)描述的欠驱动桥吊系统满足滑模到达条件,即滑模面S是渐进稳定的,因此式(3)满足式(13)终端滑模子函数条件,即式(3)欠驱动系统可转化为式(13)所示简化系统处理。 根据系统状态与分层滑模控制曲面的关系将收敛过程划分为两阶段,即到达阶段和滑动阶段,根据引理2,计算总收敛时间为: (47) 为了进一步分析本文提出控制方法的有效性与可行性,本文采用Matlab/Simulink进行数值仿真试验验证。桥吊系统动力学模型基本参数值见表1,仿真实验分为3个部分。① 采用CLITSM控制方法进行系统仿真分析,检验控制效果;② 分别采用LSM、TSM、ITSM以及PID控制方法,对比验证本文提出的控制受限改性终端滑模控制方法的有效性、优越性以及存在的问题;③ 在原有系统中加入不同形式的随机干扰以模拟工业生产中可能会出现的风阻和啃轨运行阻力,检验控制系统的鲁棒性;④ 对LSM、TSM、ITSM和CLITSM滑模面进行对比,检验本文设计的控制受限改性终端滑模控制方法收敛速度的快速性。 表1 桥吊系统基本参数值 图3 系统动态响应曲线 图4 分层滑模面曲线 从仿真结果看,桥吊系统在输入受限的情况下能够在2.1S完成负载转运,系统摆角在2.93S达到θ∈[-5°,5°]误差允许范围。对比相关文献,本文所提出的输入受限终端滑模控制能够满足欠驱动桥吊系统精确定位、快速消摆的控制目标。 桥吊控制系统在输入不受限、受限并采用等速趋近律、以及受限并采用非线性趋近律3种情况的控制输入,仿真结果如图5所示。在没有输入受限的系统中,如图5(a),控制输入处于[-10,50]区间,无法满足工程中控制信号幅值有限的现实状况;采用等速趋近律的输入受限控制器能够降低对控制信号强度的要求,但系统状态在滑模面两侧高频切换会产生抖振如图5(b)所示;为此在文献[10]的基础上,改进得到了非线性趋近律,能够有效降低抖振现象,此时系统的控制输入仿真结果如图5(c)所示。 为了进一步验证提出的控制方法的有效性,本文采用PID,线性滑模(LSM),终端滑模(TSM),改性终端滑模(ITSM)作为对比控制方法,采用表2,表4控制器参数,表3趋近律。 仿真得到系统动态响应图如图6,状态相图如图7。 图5 系统控制量图 表2 PID控制器参数 表3 等速趋近律与非线性趋近律参数 图6 系统动态响应图 图7 系统状态相图 通过图6(a)看出本文提出的改性终端滑模控制(ITSM),有最短的位置响应时间,在输入受限情况下,系统位置响应时间有所延长,但远小于终端滑模控制(TSM)的响应时间;系统摆角控制如图6(b)所示,ITSM由于位置响应快,造成了大幅度负载摆动,本文提出的CLITSM控制方法改良了摆角响应;在相图7(a)中分析得到,在负载刚开始移动和结束移动的情况下,CLITSM控制方法有更大的加速度,能够达到快速定位的要求,LSM,TSM有稍长的响应时间,但运动更为平稳;在相图7(b)中由于快速的位置响应造成了大幅摆动,这也在图6(b)有所体现。 表4 自适应与滑模控制器参数 各滑模控制方法的总滑模面图如图8,能够看出ITSM,CLITSM在1 s左右达到滑模状态,相比其他滑模面趋近时间过长,但滑模面最接近于零点,因此系统状态更稳定。 图8 各控制方法的总滑模面图 为了检验控制系统对干扰的鲁棒性,本文采用高斯噪声对系统状态进行干扰,为尽可能模拟桥吊系统的实际运行状况,在1 s和6 s分别设置干扰信号如下: (48) (49) 仿真试验取噪声信号幅值A1=2,A2=3参数ci1=1,ci2=6bi1=bi2=0.3,得到系统控制输入和状态响应如图6所示,滑模面函数如图8所示。 从图9仿真结果可以看出,基于CLITSM滑模控制方法对外界干扰和系统不确定性具有很强好的控制品质,能够快速消除外界干扰和系统不确定性的影响,受扰后能够快速进入滑模状态,因此具有较强的鲁棒性能。 图9 干扰下系统状态响应 1) 提出了一种改性终端滑模控制,能够大幅缩短系统状态达到平衡点的收敛时间; 2) 针对工程中控制信号有限的现实状况,采用自适应动态误差放大器,实现了系统输入受限的要求; 3) 针对滑模控制的高频抖振问题,采用非线性趋近律动态调节切换增益,大幅削弱了抖振幅度与幅值; 4) 系统鲁棒性分析测试得到桥吊系统在快速消摆和准确定位控制目的的同时,不论系统是否进入滑模状态,其对外界干扰都具有极强的抗扰性能。3 改性终端滑模控制器设计



4 输入受限改性终端滑模控制器设计





5 系统稳定性分析



6 仿真分析





7 结论
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
大电机技术(2022年2期)2022-06-05
科学技术创新(2021年35期)2022-01-14
建材发展导向(2021年14期)2021-08-23
科技研究·理论版(2021年22期)2021-04-18
智富时代(2018年6期)2018-08-06
智富时代(2018年6期)2018-08-06
中国集体经济(2017年1期)2017-01-04
电脑知识与技术(2016年28期)2016-12-21
汽车科技(2016年5期)2016-11-14