在轨实时引导多星成像任务规划方法研究
2019-11-09 06:18伍国威崔本杰沈庆丰
航天器工程 2019年5期
伍国威 崔本杰 沈庆丰
(上海卫星工程研究所,上海 201109)
目前,遥感卫星领域面临的挑战和具备的技术储备都达到了一个新的层次,挑战在于用户对目标成像的时效性要求和分辨率要求日趋严格;同时在轨成像卫星日益增加,成像能力逐渐提升[1],从此前的单一载荷、中低分辨率成像,在空间维、光谱维、时间维等多个方面得到了拓展。提高对遥感卫星的调度水平,针对性地设计任务规划方法,可以最大化利用现有的观测资源,更好地满足用户需求。在工程应用中,由于星地通信受到卫星过顶地面站窗口和数传能力的限制,且待发现及观测的目标常位于卫星过顶地面站之外的位置,为了应对此类任务场景,需要使用多星编队过顶,在一次过顶时间内,先使用大视场的电磁信号监测卫星普查区域内目标分布的情况,实时根据新发现的目标信息引导后续携带小视场载荷的卫星成像。
相对于单星情况,多星的任务规划由于目标数目和种类的丰富、卫星数目和载荷种类的丰富,问题建模的复杂度和问题求解的计算规模都有了巨大的增长[2]。这也致使在星载计算机有限的计算能力下,所有基于遍历搜索得到全局最优解的方法在星上都难以被采用。为了解决这一问题,国内外诸多文献在解决多星任务规划问题时,普遍采用基于多种规则的改良智能规划算法或启发式的算法[3]。在工程上,文献[4]为解决Cosmos-Skymed星座的多星任务规划问题,采用了禁忌搜索和启发式算法;文献[5]在为Pleiade卫星星座设计任务规划系统时,设计了一种具有随机迭代功能的贪心搜索算法;文献[6]对任务规划过程的多种建模方法进行了介绍,对解决任务规划模型的常用算法如遗传算法、模拟退火算法进行了详细地介绍和评估。通过对国内外星载自主任务规划技术的调研和分析可知,国外已经在军用、民用、科研等多个领域实现了多星自主任务规划技术的星载验证,国内的多星自主任务规划技术研究尚处于地面系统使用向星载验证的过渡阶段,研究方向层面,对任务规划方法的研究主要集中于静态规划,成像调度前已经获知卫星轨道、相关状态和约束、待处理的成像目标位置,对在轨实时引导成像的任务规划方法研究较少,需要进一步推进。
针对相关工程背景的需求和对在轨实时引导成像的任务规划方法研究较少的现状,本文提出了一种面向在轨实时引导成像的多星自主任务规划方法,并结合算例进行仿真分析,可为多星在轨自主任务规划技术研究提供参考。
1 实时引导式多星自主任务规划方法
1.1 卫星成像的“时间-姿态”定义
卫星特定载荷对特定目标的可见性,可以统一转化为“时间-姿态”信息,指卫星通过选择合适的姿态或载荷指向,随着轨道飞行,在载荷对目标可见弧段内,能够使视场中心准确指向地面目标的解。仅有滚动轴载荷指向一维调整能力的卫星,“时间-姿态”有唯一解,当星上有二维指向调整能力时(敏捷卫星),“时间-姿态”在最大机动能力范围内,均有解。根据具体工况的差别,可整合的输入包括轨道递推结果、目标坐标与运动规律、姿态机动调整范围、导引规律、载荷安装与指向调整自由度等,转化出的输出标准化为“时间-姿态”信息,其中时间信息指星上时刻或时间段,一般可描述为相对任务规划起始时刻的时间差值,以电磁信号监测载荷开机时刻定义为0,之后目标的可成像时刻表示为其与开机时刻的差值;姿态信息指卫星姿态调整量、SAR电扫视场角或相机摆镜调整量,在任务规划中统一为目标相对于中立位置的侧摆角(中立位置定义为0o),目标与卫星相对关系可以投影为如图1所示,左侧视部分目标为负,右侧视部分为正。
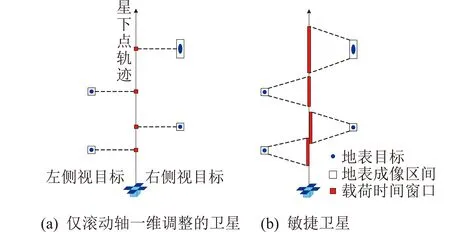
图1 不同姿态自由度对目标可见“时间-姿态”区间
通过以上方法,对输入信息进行二维化转化,根据规划任务时段长短对轨道递推模型合理简化,在保留所有有效信息的前提下,有利于算法的星载化,减小地面系统依赖性。基于卫星成像的“时间-姿态”定义,使用大小幅宽载荷配合的方法,上海卫星工程研究所在2015年发射的浦江一号卫星中,在轨验证了实时引导式单星自主任务规划方法[7]。
1.2 卫星成像的无冲突任务序列生成方法
对地成像卫星向前飞行,圆形的视场是卫星的发现视场,可见光相机的视场为矩形的窄条。仅仅是发现目标不等于有效成像,只有将进入发现视场后的目标进行自主任务规划和引导成像,使散点被纳入可见光相机对地机动成像的安排,才代表成像成功。实质上,卫星成像载荷短时间内推扫过的地面区域是一条矩形条带,点目标以二维分布的方式分布在条带上。图2给出了实时引导式卫星任务规划示意图。
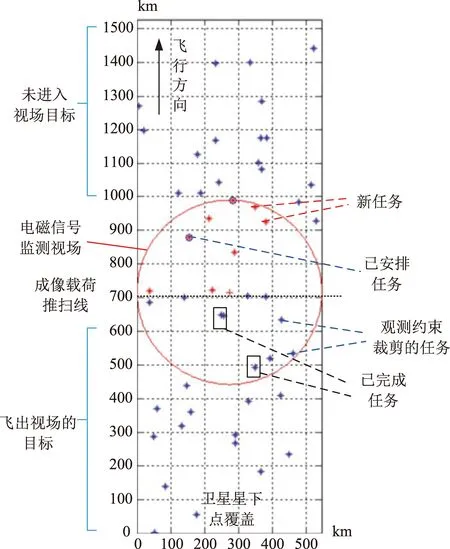
图2 实时引导式卫星任务规划示意图
圆形的电磁信号监测视场前向飞行,会先于成像载荷推扫线到达目标区域,因此可以识别和发现新出现的目标并逐个对目标进行信息解算与规划,分配给成像载荷,将每个目标表示为
Ti=(i,tTi,ATi,PTi,NTi,DTi)
(1)
式中:i为任务标识;tTi为目标的过顶时刻;ATi为相对于中轴线的侧摆角度;PTi为目标的收益值;NTi为载荷识别号;DTi为卫星对单目标的成像时长。
任务冲突主要在卫星连续对不同侧摆角度下的目标进行成像时出现,分为两种典型情况:①两个任务的成像时间窗口发生交叉;②序列中连续的两个任务,第一个任务的成像时间窗口结束后,由于载荷从一个侧摆角转移到另一个侧摆角,需要受到姿态转移约束的限制,在过顶后一个目标时,侧摆角仍未到达指定位置或姿态仍未稳定,造成冲突[8-9]。
设计一种冲突检测方法,通过检测的目标才可以被分配给成像星,使首次规划得到的任务序列便具备可执行性,一个可执行的任务序列需要符合时序排布和无冲突的要求。
用于规划的目标库Tall={T1,T2,T3,…,TN}是根据卫星对目标的成像时刻进行排序的,则时序排序对最后一个任务之外的任意一个目标Ti都存在式(2)的性质,将该性质定义为Ti与Ti+1二者时序排布,任务库若符合式(3)的性质,则目标库为时序排布的。
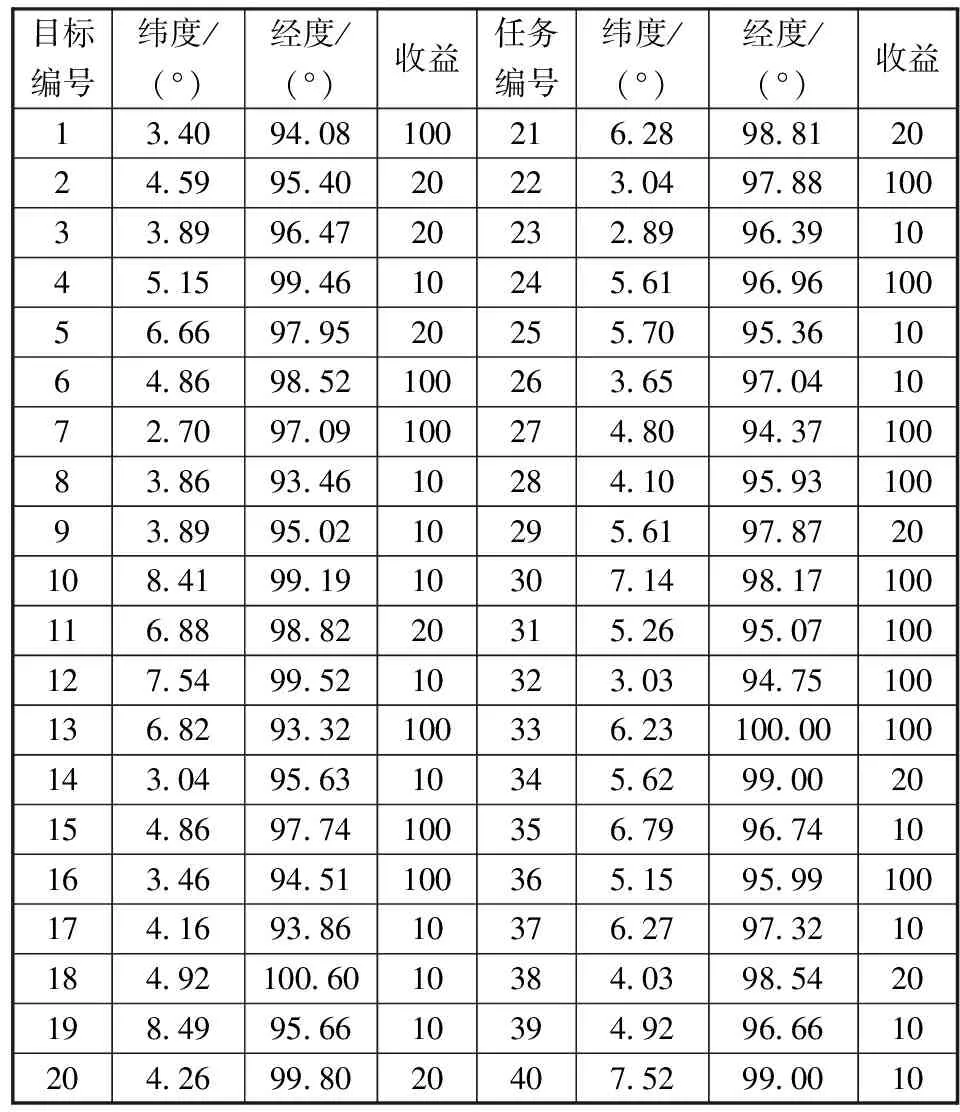
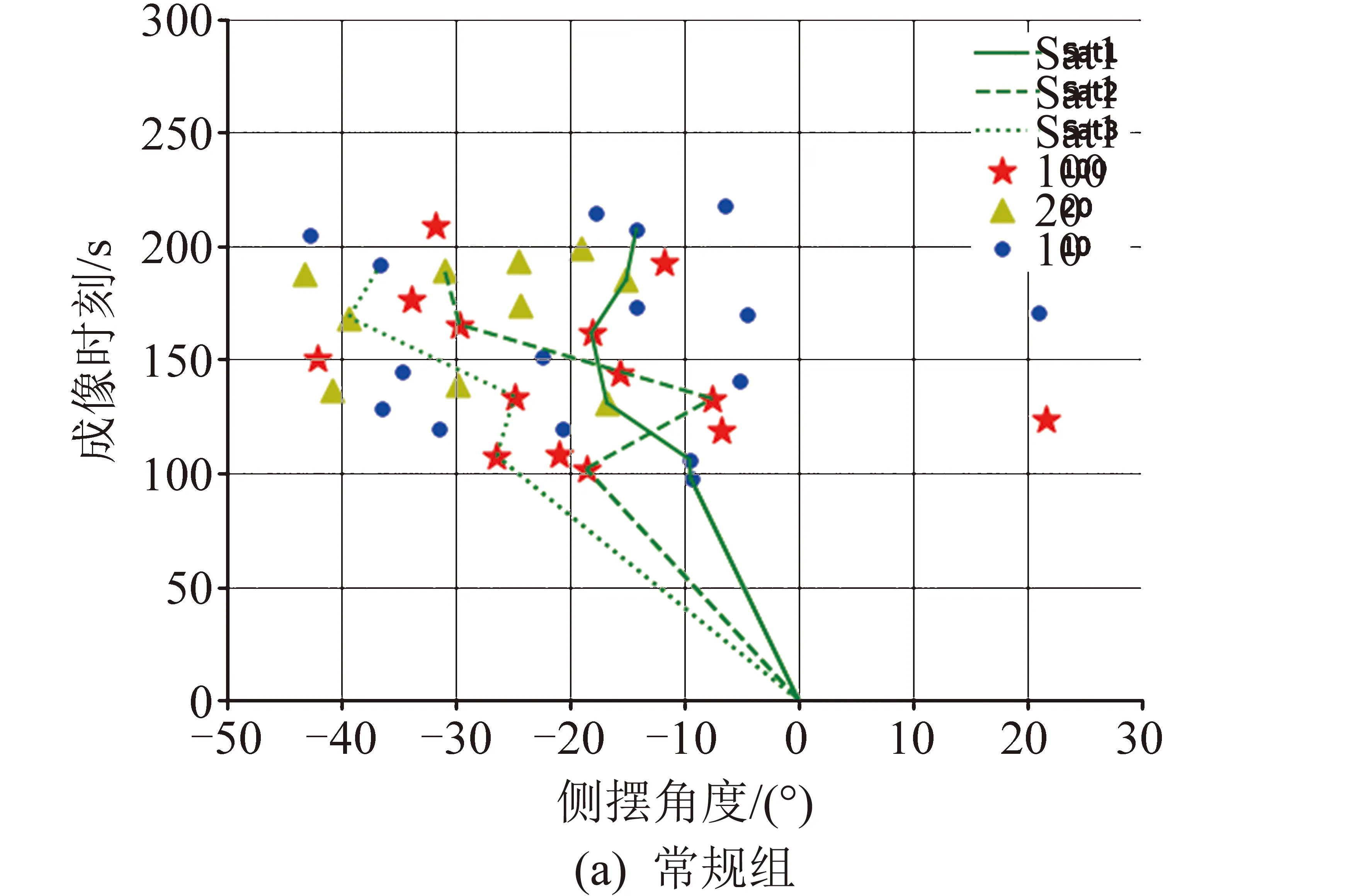
tTi≤tTi+1,1≤i (2) tT1≤tT2≤tT3≤…≤tTN (3) 式中:tTi为第i号任务Ti的最早成像时刻;N为目标的总数。利用目标Ti的信息(i,tTi,ATi,PTi,NTi,DTi)的无冲突性定义:对于时序排布的任务序列,除最后一个任务TN外的任意一个目标Ti若存在满足式(4)的性质,则Ti与后一个目标Ti+1二者具有无冲突性;对整个任务序列若符合任意连续的两个目标都具有无冲突性,则该任务序列具有无冲突性。 (4) 式中:tTi为目标的过顶时刻;ATi为相对于中轴线的侧摆角度;DTi为卫星对单目标的成像时长;ωSi 为卫星侧摆的摆动角速度;tW为摆动后成像需要的姿态稳定时间;N为目标的总数。 卫星Si本次任务规划得到的任务序列Lti同时满足时序排布和无冲突性时,该序列是可执行的,Lti内含有多个时序排列的目标。 基于目标库Tall={T1,T2,T3,…,TN}和卫星库Sall={S1,S2,S3,…,SM},对每颗卫星都生成直接可执行的任务序列方法即无冲突任务序列生成方法可以描述为: 将待分配目标时序排列,逐个检测,将每个任务插入目标序列后,将新任务序列进行时序排列,再检测整个任务序列的无冲突性,符合无冲突性则可以加入,不符合则剔除新加入的目标,更换任务序列进行检测,直到每个任务插入序列或放弃。 通过将各星的任务序列Lti的成像收益求和,由式(5)可以得到整个多星系统的得分;设计临机调整策略,可以在完成目标无冲突分配的基础上,提高卫星组对多目标成像的整体收益。 (5) 在卫星实时引导过程中发现收益更大的目标时,可以通过删改现有任务序列,将新目标插入的方法,临机调整,提高成像收益。临机调整时,有两种情况,旧任务是不可取消的:卫星已经开始对待删改成像目标的姿态机动流程或成像作业或待删改目标已经完成了过顶成像,对目标Ti的检测方法为,符合式(6)的任务则不可取消。 tTi+1-(tTi-1+DTi-1)>tM (6) 式中:tTi+1为目标Ti时序后一个目标Ti+1的成像时刻;tTi-1为目标Ti时序前一个目标Ti-1的成像时刻;DTi-1为目标Ti-1的成像时长;tM为圆形视场先于成像推扫线抵达目标区域的时长。 具体在临机调整时,可以在出现价值较高的新目标时,对待取消的旧目标进行检测,当符合式(6)的情况时,规划星将不会对该星任务序列进行删除Ti增加Ti+1的操作,转而将目标向下一颗卫星分配,直至检测完所有卫星。 以东南亚某区域分布的多个点目标作为研究对象,共计40个点目标的地理分布位置如图3所示。随机为40个点目标赋予100、20、10三个等级的成像收益,各点目标的经纬度坐标及成像收益见表1。 图3 点目标与卫星位置分布图Fig.3 Point targets and satellites position map 目标编号纬度/(°)经度/(°)收益任务编号纬度/(°)经度/(°)收益13.4094.08100216.2898.812024.5995.4020223.0497.8810033.8996.4720232.8996.391045.1599.4610245.6196.9610056.6697.9520255.7095.361064.8698.52100263.6597.041072.7097.09100274.8094.3710083.8693.4610284.1095.9310093.8995.0210295.6197.8720108.4199.1910307.1498.17100116.8898.8220315.2695.07100127.5499.5210323.0394.75100136.8293.32100336.23100.00100143.0495.6310345.6299.0020154.8697.74100356.7996.7410163.4694.51100365.1595.99100174.1693.8610376.2797.3210184.92100.6010384.0398.5420198.4995.6610394.9296.6610204.2699.8020407.5299.0010 可用的卫星共计3个,均安装幅宽30 km的可见光相机,其中S1同时安装45°锥角的电磁信号监测载荷,可以实时发现目标,引导多星成像,轨道参数如表2所示,则表3为卫星UTC时间2019-04-25T ̄04:00:00.000在WGS84坐标系下的位置速度和姿态机动能力。 表2 成像卫星轨道参数 表3 卫星姿态机动能力 仿真的UTC时间起始时刻为2019-04-25T04:00:00.000,结束时刻为2019-04-25T04:06:00.000,时长6 min,3颗卫星推扫线至结束时均已完全飞过目标区域。仿真以时间步进限制获知目标的信息,模拟在轨实时引导的情况,只有进入了圆形电磁信号监测载荷探测范围的目标才对于卫星位置可知,假设星间链路可以满足要求,使卫星实时的姿态轨道互相可知[10],且电磁信号监测载荷可以根据目标的频谱信息判断出目标的成像收益。 基于无冲突序列生成方法,将仿真试验根据使用的方法分为常规组和临机调整组,常规组仅通过无冲突序列生成方法分配目标,临机调整组基于无冲突序列生成方法增加临机调整策略,两组采用相同的40个目标以实时引导发现的方式分配给3颗卫星,评价结果有效性及收益情况。 面向该组目标分布,两种成像任务规划算法得到了不同的成像规划方案。表4和表5分别列举了两种算法下3颗星的成像序列与该序列对应的成像总收益分数。目标过顶时刻均发生在UTC时间2019-04-25T04:00:00.000至2019-04-25T04:06:00.000,表内仅列出分秒。 表4 常规组任务规划结果 表5 临机调整组任务规划结果 初步判断两组规划结果可以得出以下结论: (1)两组算法成功地将输入的目标根据时序排布分配给了3颗成像星,各个成像序列均时序排布且无冲突,目标只存在被分配一次或被放弃的状态,从未被重复分配,判定序列可执行,算法有效; (2)临机调整组在总成像目标(13∶14)少一个的情况下实现了收益1130∶720的提高,实时删改序列也未造成任务序列冲突。 为了更直观地表现两种算法所得结果的差异,通过将卫星对目标成像顺序连线的方法将成像序列列出,纳入规划才会被折线通过,不同形状的点目标表示不同等级的成像收益,图4给出了两种算法得到的任务规划方案,卫星成像折线通过的目标为成像成功的目标。 比对两张成像序列图,3颗成像星的任务执行序列具有以下特点:临机调整组对于高收益目标的覆盖性显然提高,3颗成像星覆盖了15个100收益重要目标中的11个,较常规组的6个有显著提高,表明临机调整可有效地通过用高收益目标替代低收益目标的方式提高整个规划方案的成像收益。 图4 两组任务规划方案Fig.4 Mission planning of two groups 本文针对相关工程背景的需求和对在轨实时引导成像的任务规划方法研究较少的现状,基于浦江一号在轨引导成像使用的卫星成像“时间-姿态”定义,将卫星对于目标的可见性转化为“时间-姿态”信息,再基于卫星的轨道特性和载荷配合的方式,设计了卫星成像的无冲突任务序列生成方法,在此基础上针对规划方案的成像收益优化设计了临机调整策略。仿真试验表明:在实时发现目标的限制下,算法成功地将输入的目标根据时序排布分配给了多个成像星,各个成像序列均无冲突,任务只存在被分配一次或被放弃的状态,从未被重复分配,算法有效,增加临机调整策略后,可实时地通过高收益目标替代低收益目标的方式提高整个规划方案的成像收益,可为多星在轨自主任务规划技术研究提供参考。1.3 成像收益优化的临机调整策略

2 仿真试验分析
2.1 仿真条件设定


2.2 仿真试验结果分析



3 结束语
猜你喜欢
导航定位学报(2022年5期)2022-10-13
水上消防(2022年2期)2022-07-22
中南大学学报(自然科学版)(2022年5期)2022-06-26
小猕猴智力画刊(2022年3期)2022-03-28
农业工程学报(2022年1期)2022-03-25
舰船科学技术(2021年12期)2021-03-29
意林·作文素材(2021年23期)2021-01-22
北京航空航天大学学报(2020年3期)2021-01-14
学生天地(2020年3期)2020-08-25
汽车观察(2018年9期)2018-10-23