
基于聚类与Hough变换的交通标志检测方法①
2019-11-15 07:07高娇娇
计算机系统应用 2019年11期
苗 丹,卢 伟,高娇娇,李 哲
(邢台学院 物理与电子工程学院,邢台 054000)
交通标志的识别(TSR)是人工智能领域研究的热点问题之一.道路交通标示分为禁止、警告、指示和限制等类型,交通标志中的限速标志旨在警告驾驶员应按规定速度行驶,防止事故发生,检测和识别限速交通标志作为交通标示识别技术的重要部分,对它的研究有着非常重要的意义.
交通标志识别技术主要包括检测和识别两部分,检测技术作为标志识别工作的前提非常重要,为后期的成功识别率奠定了基础.交通标志具有极其特殊的颜色和形状特征,因此研究方法多是从颜色特征和形状特征上进行相关研究.日本学者Akatsuka 和Imai[1]等是交通标志检测识别的先驱,在RGB 颜色空间上建立了查询表,用该方法来分割红绿蓝显著颜色.除了RGB 颜色空间,Vitabile[2]等人把HSV 划分为非彩色空间,不稳定彩色空间和彩色空间进行处理.但是从RGB 转换到HSV 或者HSI 颜色空间所消耗的时间多,必然会影响实时性.基于形状的检测方法主要有Hough[3]变换,距离变换[4]、模板匹配[5]、快速径向对称检测[6]、HOG 特征+SVM 分类[7]等.常发亮[8]等人提出基于HOG+LBP 特征检测方法,通过SVM 分类器实现交通标志的检测.该算法速度较慢,因此需要交通标志鲜明的颜色信息来减少待测区域以此来提高运行速度.
本文针对单一的颜色分割和形状检测方法,将二者进行结合提出了一种新的交通标志检测方法(如图1所示),主要从3 个方面展开:首先,对图像进行预处理,将原始图像质量提高;然后采用聚类方法对图像进行颜色分割,提出基于K-means 聚类算法的交通标志图像分割,该方法改进了传统RGB 颜色空间的分割方法不足之处;最后,采用形状检测定位提去出圆形标志,提出基于Hough 变换形状定位的检测方法,减少了传统Hough 变换检测消耗时间.

图1 交通标志检测方法流程图
1 图像预处理及图像分割
1.1 图像预处理
图像先经过直方图均衡化[9]进行非线性拉伸处理,使得原图中的灰度值分布变成在整个灰度值范围内相对均匀的分布进而使得图像的对比度得到增强,去除或者削弱干扰信息,更适合下一步处理.

式中,C(P) 是累积概率分布函数
然后进行噪声滤波处理,采用十字型模板进行中值滤波[10],利用邻域内图像像素点的灰度中值代替像素点的自身灰度值,使得邻域内的灰度像素值都更平滑,以此来达到消除图像噪声的目的.二维中值滤波的表达式(2)

1.2 K-means 聚类算法分割图像
K-means 算法是一种无监督的实时聚类算法[11],采用距离相似性的衡量标准对样本对象进行划分,将形式相似的样本划分到同一个类别中.K-means 算法的基本过程[12]为:
(1) 初始化常数,随机选取样本S(s1,s2,···,sn) 的K(C1,C2,···,CK) 个聚类中心.
(2) 重复计算以下过程,直到聚类中心不再改变:
1) 计算每个样本到各个聚类中心的距离di,按照距离最近的原则,将样本划分到最相似的类别中.
2) 计算划分到每个类别中的所有样本特征均值,并将该均值作为每个类的新聚类中心CW.
(3) 最终输出聚类中心不变的每个样本所属的类别.
本次研究数据中计数资料以n统计、计量资料用(±s)统计;并分别使用χ2检验、t检验,检验后P值在0.05以内表示两组差异显著,且有统计学意义,数据处理软件为SPSS21.0软件。
在K-means 算法中,需要随机初始化K分聚类中心,而K-means 算法对初始聚类中的选取较为敏感,如若选择不当,则得到的聚类结果会很差.
因此,本文对交通标志检测采用K-means 聚类算法过程如下:
(1) 将样本进行L次随机采样,对各采样结果进行以K′个质心的聚类运算,这样可以得到L组聚类结果,一共得到L×K′个簇.
(2) 在L×K′个簇中找到密度最大的簇M,将其放入集合S中,再计算其他质心与S集合中所有对象距离之和最大的质心,也将其放入到S中.
(3) 直到找到K个密度最大的质心D,也就找到了整个样本中全局较优的质心,也就是较优的样本点.
(4) 初始聚类后,得到K个质量较优的初始聚类中心,这就避免了随机选取聚类中心的敏感性.然后再用这K个初始聚类中心继续对整幅图像剩下的全部像素点进行聚类.利用较优样本点进行后续聚类提高聚类结果的稳定性.
2 交通标志图像定位
本文采用Hough 算法[13]对限速禁止图像进行定位检测,该算法可以定位检测出圆形、直线和其它参数化形状就,算法可靠性高,尤其是对含有噪声或者残缺信息的图像检测具有很好的稳定性.限速交通标志图像在我国和GTSDB 数据库中的形状都是圆形,因此采用Hough 圆形检测方法.由于传统的Hough 变换检测方法的运算速度较慢,所以为了优化运算速度,提出了改进的方法.
2.1 Hough 变换原理
Hough 变换检测圆的基本原理[14]是利用图像的边缘点映射到参数空间中,然后将在参数空间中得到的所有坐标点元素对应累加值进行累加统计,根据累加值判断圆的大小和圆心所在的位置.圆的x-y坐标方程为式(3) :

其中,(xo,yo) 是圆心坐标,R为圆半径.
因此要确定(xo,yo,R) 就相应地存在一个三维锥面.对于图像中的圆周(xi,yi) 对应一个三维锥面,若集合中的位于一个圆周上,则圆心必相交于参数空间的(xo,yo,R)点.具体如图2所示.
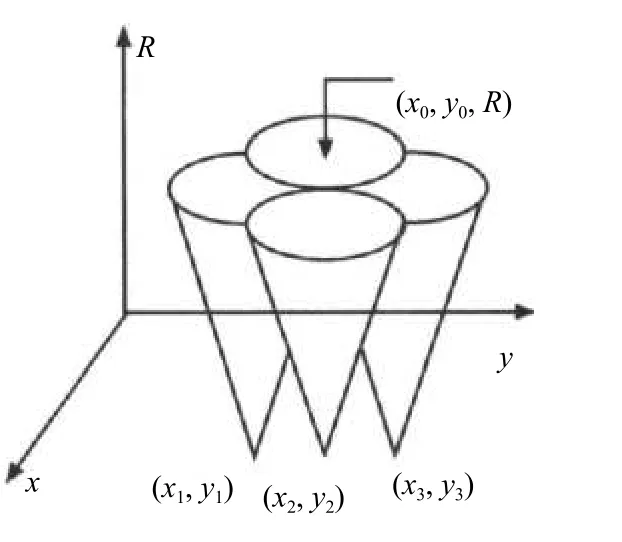
图2 Hough 变换检测圆形示意图
对于图像中的一个圆,假设圆心坐标位于 (xo,yo),边缘点(xi,yi)转换到极坐标参数空间,转换公式为式(4):

在这个极坐标方程中,θ是边缘像素(xi,yi) 处的方向.通过公式可以算出圆心坐标 (xo,yo),对于参数的空间可能半径Ro,其相应的参数空间累加器单元加1,最后通过找到累加器的最大值,确定要提取的目标圆.具体步骤如下:
(1) 对区域内进行Hough 变换,并对圆心坐标和累积值用数组记录下来;
(2) 得到的累计数组中,最大值所对应的坐标就是本区域内圆形标志的圆心;
(3) 将圆心坐标带入圆的方程中,当落在圆周及其周围的点数大于圆周长的70%时,就把R认为是所要寻找的圆的半径,该区域内存在的圆形交通标志.
2.2 改进的Hough 变换检测标志图像
Hough 变换检测圆形标志精度高,但是运算速度较慢,本文在运算速度方面进行了优化处理.由于Hough算法基于二值图像处理,为了提高运算速度,在检测之前对图像进行优化处理.本文利用图谱理论对前期预处理的灰度图像进行二值化处理,过程是利用直方图灰度等级代替像素等级,减少的像素等级量,在计算方面近似计算函数参数,得到最优的二值图像.经过上述的图像预处理,使得二值化图像目标和背景差别明显,噪声低,信息量小,图像信息尽量简单.图像越简单,参与Hough 变换的数据就越少,Hough 变换的效率就越高.在使用Hough 变换方法之前先处理图像信息,使得处理时间上有所下降,实时性效果好.
3 实验结果与分析
本文所有仿真实验的运行环境为 64 位 Matlab R2014b,主机处理器为AMD10,10 COMPUTE CORES 4CPU+GPU 2.4 GHZ,内存为4 GB.待处理的数据对象采用德国交通标志检测大赛的数据库(German Traffic Sign Detection Benchmark:GTSDB),其中包含了900 幅复杂环境下的交通标志图像,标志在图像中存在着背景相似、光照变化、模糊、褪色、过曝光等情况,是验证交通标志检测算法的理想选择.利用本文算法对测试集进行验证得到了有效的结果.经过一系列的实验测试K-means 聚类运行参数K=5,迭代次数上限30 即收敛,可以很好的分割出交通标志和背景.以下4 幅具有代表性的背景复杂情况下成功提取出交通标志目标的实验结果,提取结果显示在原图左上角,提取位置用绿色矩形框标注.
图3背景中存在汽车尾灯颜色和提取标志的颜色相似情况.图4背景曝光严重,运动中拍摄的图片,清晰度不高,背景模糊.图5目标存在弯曲变形,圆形提取增加了难度.图6目标存在污染,在分割图像时增加了难度.为了与本文方法的性能对比,选取经典的基于RGB 的图像分割方法、未改进的Hough 变换检测方法与本文方法进行检测比较.
从上图7的提取结果可以看出,背景中若有与交通标志相似的物体,提取结果发生错误.无法准确提取出交通标志,进而无法识别.未改进的Hough 变换检测方法与本文算法的提取结果相同,在运行时间上有差别,详细结果见表1.从处理一幅图的平均时间上来看,利用传统分割方法的平均时间为0.1988 s,未改进Hough 算法的平均时间为0.2532 s,而利用本文方法的平均时间为0.2344 s.本文算法的提取正确率要比传统颜色提取方法的正确率提高7.44%,本文算法平均时间要比未改进的Hough 变换检测算法提高了近0.05 s.因此本文的方法比传统的图像分割方法提取正确率高,时间上相较于传统的检测圆形标志方法有所下降,实时性有所提高.综上所述本文的方法优于常用的图像分割方法,时间上优于传统的检测方法.
4 结论
本文给出了针对红色圆形交通限速或者禁止标志的分割和定位方法.分割方法采用K-means 聚类算法进行初步图像颜色分割,其分割方法同样适用于蓝色、黄色等其他颜色的标志分割;标志图像定位采用Hough 变换检测方法针对圆形交通标志检测定位,该方法同样可以适用于矩形和三角形标志的定位.本文方法能针对强烈光照、图像模糊、背景和目标颜色相近等复杂背景下的交通标志检测,但是提取方法未考虑多幅标志存在于同一图像、浓雾、雪天等情况.考虑上述因素是提高交通标志检测实时性和有效性的未来研究方向.

图3 背景与目标颜色相近的提取结果

图4 背景曝光过度且图像模糊的提取结果

图5 检测目标变形的提取结果

图6 检测目标污染的提取结果

表1 3 种算法检测交通标志的实验结果分析
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
汽车实用技术(2022年9期)2022-05-20
计算机应用与软件(2021年7期)2021-07-16
中国传媒大学学报(自然科学版)(2021年5期)2021-02-24
广东第二课堂·小学(2017年9期)2017-09-28
儿童故事画报·发现号趣味百科(2016年7期)2017-02-08
小雪花·成长指南(2016年11期)2016-12-07
数学大王·低年级(2016年1期)2016-09-10
小天使·一年级语数英综合(2016年8期)2016-05-14
互联网天地(2016年1期)2016-05-04
