
基于STM32的简单旋转倒立摆
2019-11-18 07:04邓新宇
电子技术与软件工程 2019年18期
文/邓新宇
1 设计方案选择与模块分析
1.1 结构设计方案
系统要求要实现对摆杆角度以及摆杆运动的控制,并要保证运动控制的快速性、实时性和平稳性,尽量提高对摆杆摆动角度范围的精度控制。我们的设计结构如图1所示,其中主要包括主控、外设、和角度变化率检测、旋臂控制等模块,通过按键选择模式及参数的调整、用角度传感器反馈摆杆角度数据给主控模块,有主控模块控制电机带动旋转臂,以实现间接控制摆杆的角度变化。
1.2 系统各部分模块作用及其功能
功能结构框图如图2所示。
1.2.1 按键输入部分
按键主要负责控制模式的选择,根据设计要求,功能主要包括如下部分:
(1)初始模式,摆杆自然下垂状态;
(2)工作模式一,摆杆摆角来回摆动达到或超过-60度到60度;
(3)工作模式二,摆杆处于自然下垂状态开始,尽快增大摆杆的摆动幅度,直至完成圆周运动;
(4)工作模式三,摆杆自然下垂外力作用下到倒立状态;
(5)工作模式四,摆杆无外力作用到倒立状态;
(6)工作模式五,摆杆倒立状态下旋转臂旋转达到或超过单方向360度。
1.2.2 STM32F4控制芯片
作为系统的核心控制及数据模块,功能主要包括如下部分:
(1)接收按键输入命令,控制系统工作模式;

表1:摆杆摆动角度与计算角度是否一致

表2:摆杆完成圆锥摆测试所得数据

表3:摆杆完成调整到倒立状态所得数据
(2)接收欧姆龙旋转编码器的电脉冲量数据反馈,稳定系统整体的工作状态;
(3)根据系统工作要求,控制直流电机工作方式,并接收直流电机编码器电脉冲量数据,稳定电机的运转。
1.2.3 直流电机
直流电机作为旋转臂的控制部分,根据设计要求,功能主要包括如下部分:
(1)控制旋转臂的旋转,达到系统的工作要求;
(2)其电机编码器反馈电机的速度等运转数据,通过主控间接实现电机运转的稳定。
1.2.4 欧姆龙旋转编码器
欧姆龙旋转编码器其功能主要是对摆杆旋转的角位移、角速度以及旋转方向等数据向主控芯片进行电脉冲量的反馈。
1.2.5 电源和直流电机驱动
电源和直流电机驱动功能主要包括如下部分:
(1)电源:对STM32F4主控模块和直流电机驱动进行供电;
(2)直流电机驱动:驱动直流电机达到工作状态。
2 系统理论分析
2.1 起摆算法
倒立摆的自主摆起就是要使摆杆在很短时间内从静止下垂的状态迅速摆起到倒立稳态位置。起摆算法通过旋转臂的作用力给摆杆提供动能,通过动能使摆杆摆起。电机能提供作用力,在摆杆的运动过程中,为了避免力相互抵消而导致的一些问题,仅在摆杆摆起一定角度时施加作用力。摆杆起摆的示意图如图3所示。

图1:系统结构图

图2:功能结构框图
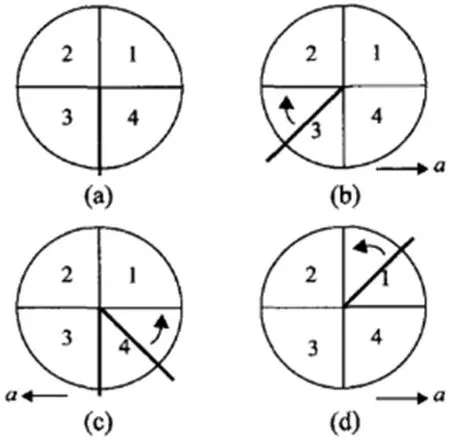
图3:摆杆起摆示意图
图中区域3与区域4之间为摆杆下垂静止时的位置,区域1与区域2之间为垂直倒立平衡时的位置,设定摆杆顺时针旋转时角速度为正,逆时针则为负,那么旋转臂左转为正方向,而右转则为负。开始摆动时,给摆杆正角速度,当检测到摆杆进入区域3且角速度为正时,给旋转臂施加负力,如图(b)所示,因为惯性摆杆将会继续摆起,此时动能和重力势能、作用力会相互抵消,使其正好摆到最高点并相对静止。此时施加一个负作用力摆杆进入2象限,摆杆的重力势能会转换为动能从而使得摆杆进入区域4。当检测到摆杆在区域4且角速度为负时,给旋转臂一个正方向的作用力,如图(c)所示,由于惯性摆杆会继续摆起,动能和重力势能、作用力再次相互抵消,随后摆杆会进入区域1,并最终到达倒立平衡位置并相对静止,起摆结束。
2.2 稳摆算法
采用了PID双闭环的方法,由于速度控制对于角度的控制是一种干扰,所以角度闭环输出减去速度闭环输出作用于电机来控制摆臂,进而控制摆杆倒立,两种控制作用在程序中进行耦合
2.3 角度环
2.3.1 算法设计
通过STM32用adc采集角位移传感器(WDD35D-4导电塑料电位器)的值,由之前学到的PID控制算法理论可以得出,通过控制电机的转动与PWM的值来使倒立摆达到我们所希望的角度。根据所需要的系统要求,只需要让其达到所期望的角度,历史的差值对其影响并不大,所以只需要PD调节即可完成所需。
2.3.2 参数整定
KP:逐渐增大KP的值,直到出现反向或者低频抖动的情况;
KD:微分控制,用来抑制转动惯量(即转动过猛)。
2.4 位置环
单纯进行角度环的控制,会稳定一段时间,但是最终会朝一个方向运动下去,因此还必须加上位置环的控制位置环就是尽可能的让转动的轴不要移动。
3 测试方案及结果
3.1 测试方案一
先使摆杆静止使其保持铅锤状态,选择模式一开始同时使用STM32F407调试窗口观察旋转编码器返回的脉冲数计算其角度,看是否达到要求,并测量实际摆杆摆动角度,看是否一致。如表1所示。
3.2 测试方案二
先使摆杆静止使其保持铅锤状态,选择模式二开始同时观察实际情况下摆臂控制摆杆的摆动,摆杆是否做圆周摆。如表2所示。
3.3 测试方案三
用手将摆杆轻触到165度附近,松手。选择模式三开始计时,观察摆杆能否在极短时间内调整到倒立状态,并观察摆臂摆动角度是否小于90度。如表3所示。
4 结论
从测试结果反映,整个旋转倒立摆能够完成基本要求,其能在短时间内实现摆杆摆动及圆周运动,并在受到外力的情况下迅速回到正常状态,整个旋转倒立摆稳定性好,抗干扰能力强。
猜你喜欢
大电机技术(2022年5期)2022-11-17
工程技术研究(2021年1期)2021-03-20
塑料包装(2019年6期)2020-01-15
设备管理与维修(2019年14期)2019-06-16
现代机械(2018年5期)2018-11-13
电子制作(2017年1期)2017-05-17
中学生数理化·高三版(2016年2期)2016-09-10
淮南师范学院学报(2015年3期)2015-03-22
电机与控制应用(2015年1期)2015-03-01
中国卫生(2014年5期)2014-11-10
