
介电弹性体球壳瞬态振动的最优参数控制
2019-11-27 03:21杨颖金肖玲王永
振动工程学报 2019年5期
杨颖 金肖玲 王永
摘要: 介电弹性体球壳在冲击载荷作用下发生瞬态振动,由于其具有较大柔性,将经历较长时间的持续衰减震荡。最优有界参数控制策略是通过实时地微调电压使球壳的震荡迅速衰减,从而达到抑制振动的目的。首先,建立伸长比扰动量满足的微分方程,并结合性能指标和控制电压界限,三者构成最优有界参数控制问题;而后,由动态规划原理之极值条件确定最优控制律,并采用伪逆算法求解最终的动态规划方程,从而导出最优控制电压。数值研究表明:该控制策略具有较好的控制效果及较高的鲁棒性。
关键词: 最优参数控制; 介电弹性体; 瞬态振动; 控制界限; 动态规划原理
中图分类号: O328; O347.1 文献标志码: A 文章编号: 1004-4523(2019)05-0778-08
DOI:10.16385/j.cnki.issn.1004-4523.2019.05.005
引 言
介电弹性体(DE)材料是一类典型的电活性软材料,而DE结构是由DE薄膜及附连于其上下表面的电极组成的[1]。在电极上施加电压,由于电荷间的静电作用,薄膜厚度减小而在面内方向延展,即DE结构的作动机制;薄膜厚度方向或面内方向的载荷作用使平行板电容器电容发生变化,通过检测该电容值即可给出变形量,即DE结构的传感机制。基于上述机电耦合特征,DE结构已在多个领域获得广泛应用,如人工肌肉,自适应光学元件,软体机器人,共振器及传感器等[2-5]。
伴随着软体机器人技术的快速发展,DE作动器的研究也取得了极大的进展。若将压电作动器、磁流变/电流变作动器等传统器件称为“刚性”作动器,则DE作动器可称为“柔性”作动器。DE作动器克服了传统的“刚性”作动器变形量小、刚度大等缺点,提高了软体机器人的环境适应性和人机交互性。DE作動器具有多种不同的构型,如平面型、柱型及球壳型等,各种构型有不同的特点及不同的适用场合。如平面型DE作动器由矩形DE薄膜和刚性框架组成,矩形薄膜在两个方向预拉伸后置于刚性框架上,仅有一个边界可自由运动。该作动器具有单向作动能力,且其性能可通过预拉伸调节[6-9]。柱型作动器由平面DE结构卷曲而成,可提供较大的作动力。球壳型DE作动器的初始构型即为球状,在球壳内表面和外表面涂敷电极,常用于实现流体泵功能[10]。在内外压差及常电压作用下,球壳处于某一静止平衡位置,突然切换电压值则球壳迅速向另一平衡位置切换,并最终稳定于该位置;上述过程周而复始,即实现了泵功能。
各类不同构型DE作动器的动态特性都已有了一些研究。对平面型DE作动器,通过热力学平衡理论及欧拉-拉格朗日方程法研究了其面内变形的动力学行为[11-12],亦讨论了阻尼、应变硬化及黏弹性等因素对DE作动器非线性动力学行为的影响[13-14]。对柱型DE作动器,通过数值求解简化的偏微分方程得到其动态响应,并通过实验得以验证[15]。对球壳型DE作动器,在热力学框架下研究了周期压力及周期电压作用下的非线性振动行为,揭示了超谐共振及次谐共振等典型的非线性动力学特征[16];通过随机平均法研究了白噪声作用下,以及谐和与白噪声联合激励下的随机动态响应,解释了其伸长比概率密度的不对称性特征[17-18];亦研究了球壳厚度对结构稳定性及动态响应的影响[19]。在机构及结构控制领域,也已提出了一些基于DE作动器的轨迹控制及振动控制方法。基于平面型DE作动器的非线性动力学模型,建立了轨迹追踪的前馈控制方法,通过实验验证了该方法对于追踪典型预期轨线的有效性[20]。基于各种理论模型建立了结合位移自传感机制的闭环控制策略[21-22],并通过比较未控和受控系统的传递函数发展了其他控制方法,如反馈主动控制、速度反馈控制和位移反馈控制等[23-25]。
球壳型DE作动器多用作流体泵,从一个平衡状态切换到另一个平衡状态的过程中引起持续的震荡必将降低其工作效率,因此有必要研究DE球壳瞬态振动的主动控制问题。本文研究了如何通过微调电压来抑制冲击作用下DE球壳的瞬态振动,使DE球壳的震荡迅速衰减从而快速达到其平衡状态。该问题归结为非线性系统的最优参数控制问题,结合动态规划原理及控制电压的界限导出最优有界参数控制。评估了控制策略的控制效果,并讨论了控制电压界限及冲击致初始速度对控制效果的影响。
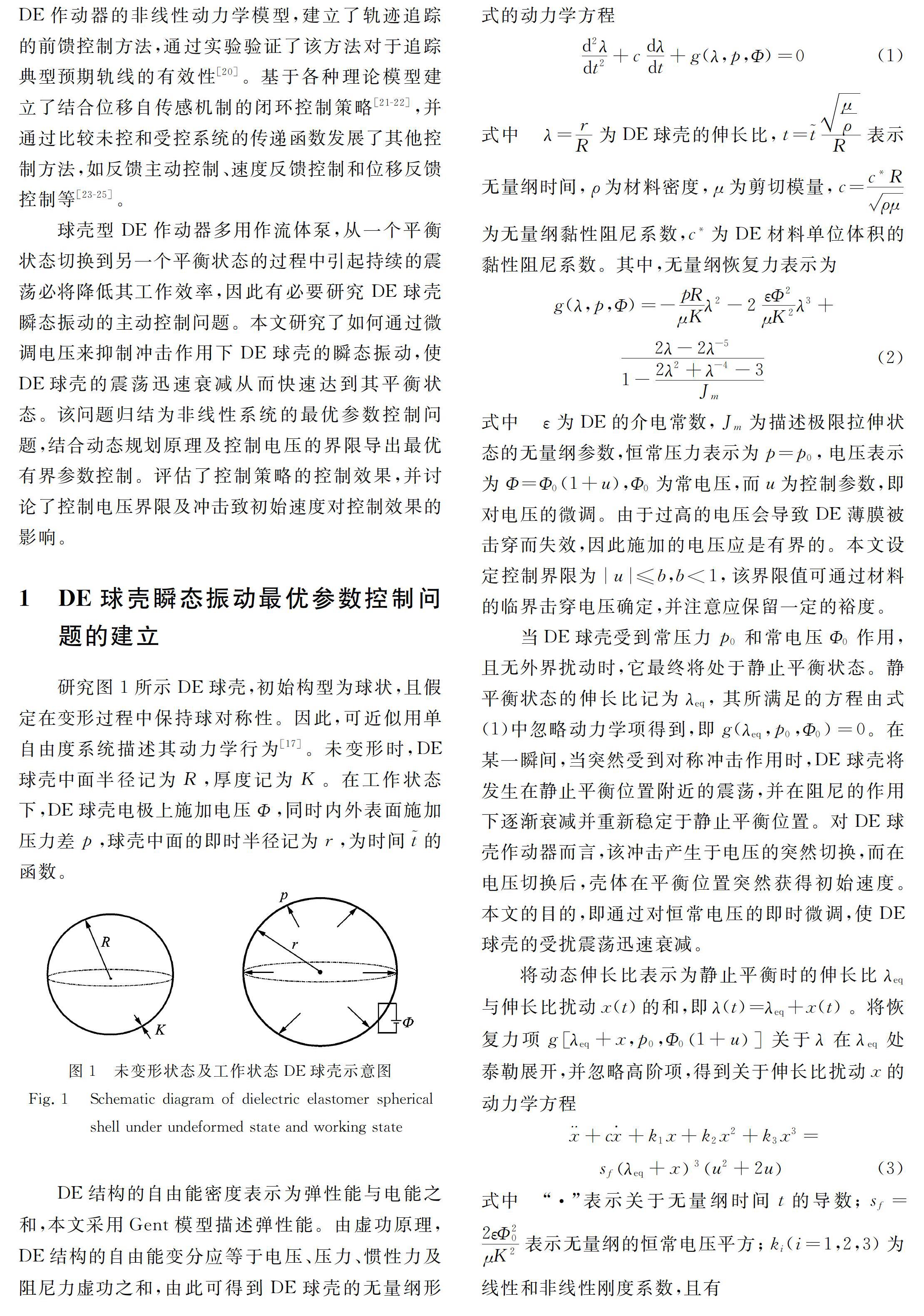
1 DE球壳瞬态振动最优参数控制问题的建立 研究图1所示DE球壳,初始构型为球状,且假定在变形过程中保持球对称性。因此,可近似用单自由度系统描述其动力学行为[17]。未变形时,DE球壳中面半径记为R,厚度记为K。在工作状态下,DE球壳电极上施加电压Φ,同时内外表面施加压力差p,球壳中面的即时半径记为r,为时间的函数。
4 结 论
本文研究了受初始冲击作用下DE球壳瞬态振动的最优有界参数控制问题。通过对电压的实时微调,使冲击作用下的DE球壳震荡迅速衰减。文章首先导出DE球壳结构关于伸长比的运动微分方程,之后通过在静止平衡位置的展开处理得到关于扰动量的微分方程式,结合性能指标和控制界限建立了确定性的最优有界参数控制问题。随后应用动态规划原理之极值条件导出最优控制律,并通过求解最终形式的动态规划方程得到最优控制电压。最后为了衡量最优有界参数控制策略的性能定义了控制效果表达式。数值算例表明:控制效果随控制界限的增大而增大;当控制电压界限达到一定值时,控制效果趋于稳定;且该控制策略对冲击致初始速度具有好的鲁棒性。
值得指出的是,从理论上讲,本文引入的控制界限不是必须的。放弃控制界限的约束,则得到了最优无界参数控制问题,该问题仍可采用本文的方法处理。然而对实际问题,由于材料性能的限制,控制力存在界限是必然的。除本文的处理方法外,亦可以首先按无界控制引入最优控制力,之后截断最优无界控制力使之符合对控制力的实际限制。
參考文献:
[1] 锁志刚,曲绍兴. 介电高弹聚合物理论[J]. 力学进展,2011,41(6):730-750.
Suo Zhigang, Qu Shaoxing. Theory of dielectric elastomer[J]. Advances of Mechanics, 2011,41(6):730-750.
[2] Kovacs G, During L, Michel S, et al. Stacked dielectric elastomer actuator for tensile force transmission[J]. Sensors and Actuator A-Physical, 2009,155(2): 299-307.
[3] Brochu P, Pei Q B. Advances in dielectric elastomers for actuators and artificial muscles[J]. Macromolecular Rapid Communications, 2010, 31(1):10-36.
[4] McKay T, O′Brien B, Calius E, et al. An integrated, self-priming dielectric elastomer generator[J]. Applied Physics Letters, 2010,97(6):062911.
[5] Kaal W, Herold S. Electroactive polymer actuators in dynamic applications[J]. IEEE-ASME Transactions on Mechatronics,2011,16(1): 24-32.
[6] Li Tiefeng, Qu Shaoxing, Yang Wei. Electromechanical and dynamic analyses of tunable dielectric elastomer resonator[J]. International Journal of Solids and Structures, 2012,49(26): 3754-3761.
[7] Li Bo, Zhang Junshi, Liu Lei, et al. Modeling of dielectric elastomer as electromechanical resonator[J]. Journal of Applied Physics,2014,116(12): 124509.
[8] Zhang Junshi, Chen Hualing, Sheng Junjie, et al. Dynamic performance of dissipative dielectric elastomers under alternating mechanical load[J]. Applied Physics A-Materials Science & Processing, 2014,116(1): 59-67.
[9] Zhou Jianyou, Jiang Liying, Khayat R E. Viscoelastic effects on frequency tuning of a dielectric elastomer membrane resonator[J]. Journal of Applied Physics, 2014, 115(12): 124106.
[10] Mockensturm E M, Goulbourne N. Dynamic response of dielectric elastomers[J]. International Journal of Nonlinear Mechanics, 2006, 41(3):388-395.
[11] Sheng Junjie, Chen Hualing, Li Bo, et al. Nonlinear dynamic characteristics of a dielectric elastomer membrane undergoing in-plane deformation[J]. Smart Materials and Structures, 2014,23(4): 045010.
[12] Xu Baixiang, Mueller R, Theis A, et al. Dynamic analysis of dielectric elastomer actuators[J]. Applied Physics Letters,2012,100(11): 112903.
[13] Sheng Junjie, Chen Hualing, Liu Lei, et al. Dynamic electromechanical performance of viscoelastic dielectric elastomers[J]. Journal of Applied Physics,2013,114(13): 134101.
[14] Wang Fangfang, Lu Tongqing,Wang T J. Nonlinear vibration of dielectric elastomer incorporating strain stiffening[J]. International Journal of Solids and Structures,2016,87: 70-80.
[15] Son S, Goulbourne N C. Dynamic response of tubular dielectric elastomer transducers[J]. International Journal of Nonlinear Mechanics,2010,47(20):2672-2679.
[16] Zhu Jian, Cai Shengqiang,Suo Zhigang. Nonlinear oscillation of a dielectric elastomer balloon[J]. Polymer International,2010, 59(3): 378-383.
[17] Chen Feifei, Zhu Jian,Wang M Y. Dynamic electromechanical instability of a dielectric elastomer balloon[J]. EPL, 2015, 112(4): 47003.
[18] Jin Xiaoling, Huang Zhilong. Random response of dielectric elastomer balloon to electrical or mechanical perturbation[J]. Journal of Intelligent Material Systems and Structures, 2017,28(2): 195-203.
[19] Yong Huadong, He Xinzhen, Zhou Youhe. Dynamics of a thick-walled dielectric elastomer spherical shell[J]. International Journal of Engineering Science,2011,49(8): 792-800.
[20] Gu Guoying, Gupta U, Zhu Jian,et al. Feedforward deformation control of a dielectric elastomer actuator based on a nonlinear dynamic model[J]. Applied Physics Letters,2015, 107(4): 042907.
[21] Rizzello G, Naso D, York A, et al. Closed loop control of dielectric elastomer actuators based on self-sensing displacement feedback[J]. Smart Materials and Structures, 2016,25(3): 035034.
[22] Rizzello G, Naso D, York A, et al. Modeling, identification and control of a dielectric electro-active polymer positioning system[J]. IEEE Transactions on Control Systems Technology,2014,23(2): 632-643.
[23] Sarban R, Jones R W. Physical model-based active vibration control using a dielectric elastomer actuator[J]. Journal of Intelligent Material Systems and Structures,2012,23(4): 473-483.
[24] Kaal W, Herold S. Electro-active polymer actuators in dynamic applications[J]. IEEE-ASME Transactions on Mechatronics,2011,16(1):24-32.
[25] Herold S, Kaal W, Melz T. Dielectric elastomers for active vibration control applications[C].Proceedings of Electroactive Polymer Actuators and Devices(EAPAD),2011.
[26] Ying Z G, Ni Y Q, Duan Y F. Parametric optimal bounded feedback control for smart parameter-controllable composite structures[J]. Journal of Sound and Vibration,2015, 339:38-55.
Abstract: As impacted by an external load, a dielectric elastomer spherical shell will suffer from transient oscillation. The attenuation vibration of the spherical shell will sustain long time due to its large flexibility. This work establishes the optimal bounded parametric control strategy to suppress the transient oscillation by slightly adjusting the voltage in real time. Firstly, the motion of equation with respect to the perturbation of stretch ratio is derived, and the optimal bounded parameter control problem is constituted by combining with a performance index and a control constraint. The control law is determined by the extremum condition of the dynamic programming principle, and the control voltage is obtained by solving the final dynamic programming equation through the pseudoinverse algorithm. Numerical results show the good control effectiveness and high robustness to the impact intensity.
Key words: optimal parametric control; dielectric elastomer; transient vibration; control constraint; dynamic programming principle
作者簡介: 杨 颖(1993-),女,博士研究生。电话:13777863315;E-mail: 21624007@zju.edu.cn
