
基于支持度函数的2D雷达目标高度估计方法*
2019-11-28 03:09杨军佳时银水王世军黄沈华
舰船电子工程 2019年11期
杨军佳 时银水 王世军 黄沈华
(陆军炮兵防空兵学院郑州校区 郑州 450000)
1 引言
自从第二次世界大战以来,雷达在战争中的作用越来越重要。为了获取目标比较精确的位置信息,通常需要对目标的三维坐标进行测量。虽然在装备更新换代的过程中,三坐标体制的雷达逐步替代老旧体制的2D雷达,但是2D雷达并不是没有任何用武之地。为了能够获取目标的三维信息,一些学者利用两坐标雷达的测量参数对目标的三维坐标进行了有益的探索。文献[1]针对等高度飞行、高信噪比的目标,阐述了利用两坐标雷达获取的目标幅度和距离变化信息进行测高的原理,对波束形状和录取数据数量等因素的影响进行了分析。文献[2]利用目标的动态模型,结合两坐标雷达关于目标多个时刻的测量信息,对目标三维空间的位置进行最大似然估计。文献[3]针对两坐标雷达组网系统误差估计忽略了目标高度影响的问题,采用模块化方法,将3部两坐标雷达组网分成平面与空间两个模块进行目标高度与系统误差的联合估计。文献[4]从集中式框架下融合中心的广义量测方程出发,推导了融合中心的更新方程,并用各部两坐标雷达的局部跟踪信息代替更新方程中的量测,从而得出目标3维状态的估计。文献[5]针对雷达普遍存在距离和角度量测系统误差工程实际情况,以及两坐标雷达目标高度可观测分析和估计技术缺乏对雷达系统误差考虑不足之处,利用Fisher信息矩阵,通过求解CRLB下限,对系统误差下的两坐标雷达目标高度可观测分析问题进行了深入研究。文献[6]以目标恒海拔等速运动为前提,利用协同单元提供的目标指示信息,对两坐标雷达的空间目标高度问题进行了研究。文献[7]针对弹载雷达平台不稳定的情况下,分析了宽波束比窄波束测高的优势以及3种不同算法测高精度的对比。文献[8]利用两部2D雷达的局部估计建立关于目标高度所产生系统误差的非线性模型,进而采用UKF滤波方法实现对目标的实时估计。文献[9]根据雷达天线的“仰角-增益”测试数据,利用目标点迹属性中的高低波束增益差,估算目标高度信息。文献[10]分析了不同位置、目标高度条件下几何量测理论误差,并利用滤波算法对目标高度进行工程化应用。
以上文献所提方法为解决目标高度估计问题提供了一定的思路。本文考虑采用多部2D雷达组网的方式,利用不同雷达测量同一目标的冗余信息,实现对目标高度的融合估计,以提供目标的三维坐标信息。
2 理论分析
2.1 高度估计可行性分析
图1为雷达与目标三维位置关系示意图。其中,点A表示其中一部雷达,其坐标为;点B表示另外一部雷达,其坐标为;点C表示目标,其坐标为;点 D 是目标在XOY平面上的投影,其坐标为;点 D'是点B向CD作垂线,且与CD的交点,其坐标为;点 E 是过点 D 向 X 轴作垂线,且与X轴的交点,其坐标为;点 E'是过点 D'向过B点且与X轴平行的线作垂线,且与该线的交点,,其坐标为;雷达 A 对目标 C 的测量距离为rA、测量方位角为α,雷达B对目标C的测量距离为rB、测量方位角为β。
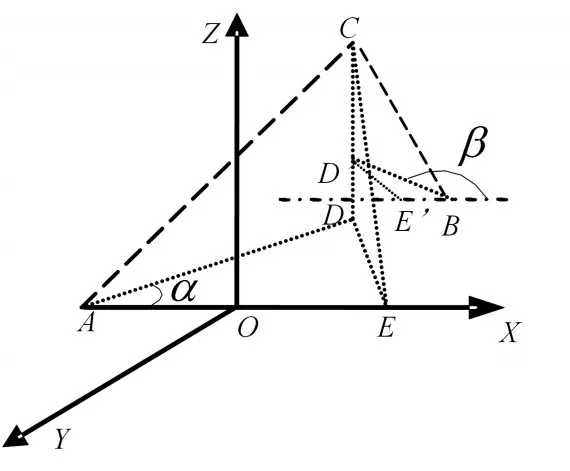
图1 雷达与目标三维位置关系示意图
从上面的描述中,可以得到:
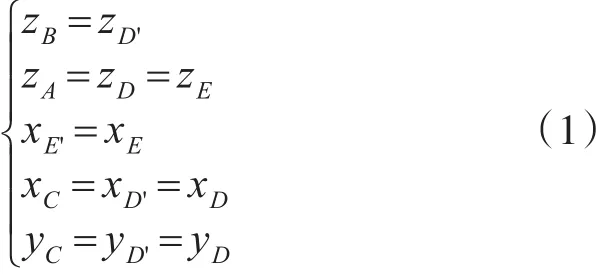
从图1中雷达与目标之间的位置关系,可以得到:
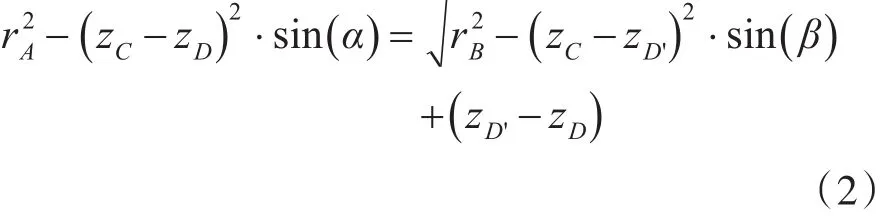
将式(1)代入式(2)可得:
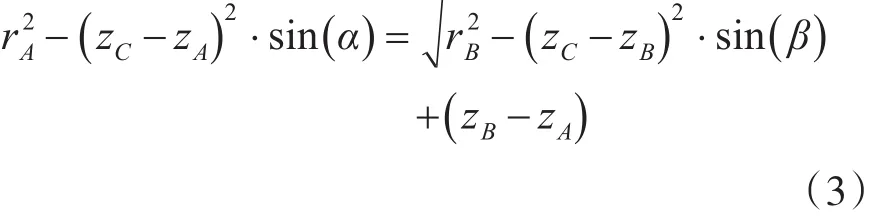
在式(3)中,由于 rA、α、rB、β以及 zA、zB为已知参数,则可计算出zC的值。
2.2 高度数据融合估计
由于雷达对目标距离和方位角的测量存在误差,导致式(3)计算出的目标高度也存在误差。为了提高目标高度估计精度,将n部雷达两两组合计算的个目标高度值进行加权融合,以减小距离和方位角测量误差的影响。
由于修正证据距离是在Jousselme距离的基础上进行的改进,不仅保留了Jousselme距离良好的数学特性,而且解决了其在衡量证据相似性上所存在的问题,并且收敛性更好[11],因此,本文考虑以任意两部雷达组合估计的目标高度之间的修正证据距离来确定不同高度估计值之间的融合权值。
假设第 i、j(1≤i<j≤n)部雷达对目标高度的估计值为 hij,第 j、k(1≤j<k≤n)部雷达对目标高度的估计值为hjk,则依据文献[12]可得hij和hjk之间的修正证据距离为

式(4)中 dij,jk越小,表明高度估计值 hij和 hjk之间的差异越小。
定义1 两高度估计值之间的相互支持度为两高度估计值之间修正证据距离的倒数,即:

式(5)中 d'ij,jk越大,表明两高度估计值之间的相互支持程度越高,目标高度真实值越接近hij和hjk。
依据上述分析,可以构建n部雷达任意两部组合计算出的目标高度值之间的相互支持度矩阵D:

从式(7)中可以看出,任意两部雷达组合估计的目标高度值与其余-1个高度估计值之间的一致支持度越大,该两部雷达组合估计的目标高度值可信度越高,其在高度融合估计中所占的比重应该越大。

依据式(9)可得n部雷达对目标的高度融合估计值为:

3 雷达组网高度估计方法
依据上述分析,在采取半自动录取目标参数的情况下,利用多部雷达对同一目标参数测量的冗余信息估计目标高度值的方法为
步骤一:所有测量数据时空对准
假设第i部雷达在ta时刻测量的目标参数为时刻测量的目标参数为,则tc时刻的目标参数为

在进行参数测量信息时空对准的时候,尽量以采样间隔比较大的参数测量时间为基准,以减小因时空对准引入较大的误差。
步骤二:依据式(3)计算同一时刻n部雷达中任意两部雷达组合的个高度估计值。
步骤三:依据式(4)、(5)、(6)构建 n 部雷达任意两部组合计算出的目标高度值之间的相互支持度矩阵D。
步骤四依据式(7)计算任意两部雷达组合估计的目标高度值与其余-1个高度估计值之间的一致支持度。
步骤五依据式(8)计算任意两部雷达组合估计的目标高度值在个高度估计值融合中所占的比重。
步骤六依据式(9)进行n部雷达对目标高度的融合估计。
4 仿真分析

图2 500次仿真高度估计精度
从图2及图3可以看出:
1)采用任意两部雷达都能够对目标的高度信息进行估计,但是估计精度不同。虽然第二和第三部雷达组合的高度估计精度优于第一和第二部雷达组合的高度估计精度,但是两者的高度估计精度相差不大;第二和第三部雷达组合以及第一和第二部雷达组合的高度估计精度明显优于第一和第三部雷达组合的高度估计精度。主要原因是第一和第二部雷达以及第二和第三部雷达距离和方位测量精度的偏差一样,都明显小于第一和第三部雷达的距离和方位测量精度的偏差。
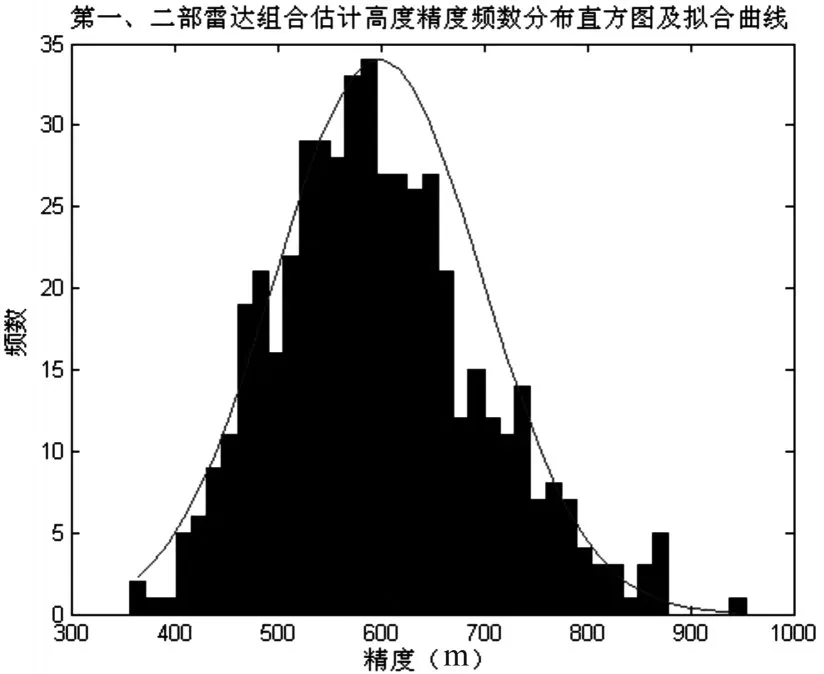
图3 (a)第一、二部雷达组合估计高度精度频数分布直方图及拟合曲线
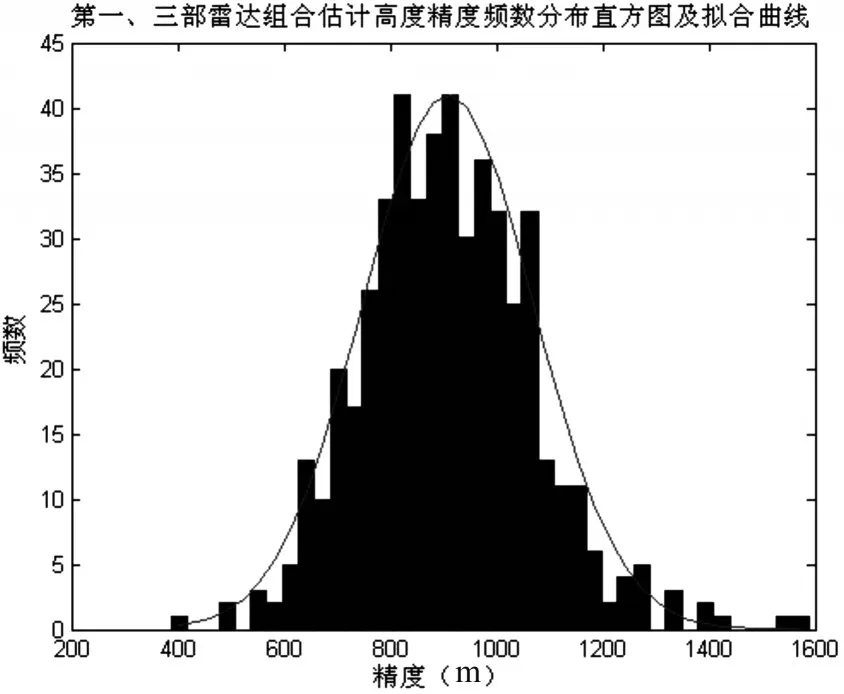
图3 (b)第一、三部雷达组合估计高度精度频数分布直方图及拟合曲线

图3 (c)第二、三部雷达组合估计高度精度频数分布直方图及拟合曲线
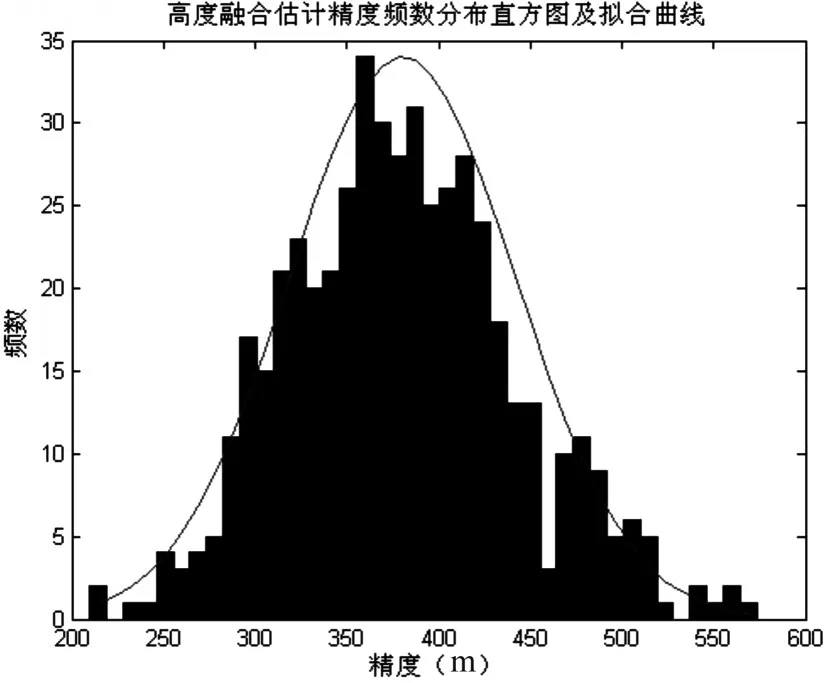
图3 (d)高度融合估计精度频数分布直方图及拟合曲线
2)进行加权融合后的高度估计精度明显优于任意两部雷达组合对目标的高度估计精度。主要原因是依据越靠近真实值的数据出现的概率应该最大的大数定律,通过计算不同高度值之间的一致支持度,比较科学地确定不同高度值参与融合的权重。
5 结语
通过对2D雷达组网进行目标高度估计的分析和讨论,可以得出:
1)采用两部雷达对目标高度估计的时候,尽量使用距离和方位测量精度相差不大的两部雷达,最好是同型号的雷达;
2)为了提高目标高度的估计精度,可以采用多部雷达组网的方式。
但是在采用雷达组网方式的时候,必须考虑估计精度的提高程度与部署雷达数量的关系,必须找到一个合适的临界值,这也是本课题接下来需要研究的内容。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
中国畜牧杂志(2022年4期)2022-04-15
西南交通大学学报(2022年1期)2022-02-11
舰船电子工程(2021年1期)2021-02-26
火控雷达技术(2020年3期)2020-10-13
科教导刊·电子版(2019年12期)2019-06-12
中学生理科应试(2017年2期)2017-04-01
太空探索(2016年7期)2016-07-10
华人时刊(2016年16期)2016-04-05
职业·中旬(2009年12期)2009-06-01
