FAST馈源支撑系统三维可视化模型的创建
2019-12-06 08:48曹子腾郭阳赵正旭孙才红张庆海
软件 2019年10期
曹子腾 郭阳 赵正旭 孙才红 张庆海


摘 要: 国产操作系统因其安全可靠被许多特定的企业和单位使用。中标麒麟系统是国产操作系统中较为成熟的一个系统。Blender是一款跨平台的三维动画制作软件,功能强大且可以在任何主流的操作系统上工作。在中标麒麟系统下,用Blender建模软件对“天眼”FAST中的一部分——馈源支撑系统的三维模型进行了创建,并选取其中的一部分,对其模型的创建过程进行了详细地介绍。
关键词: 中标麒麟;Blender;FAST;馈源支撑系统
中图分类号: TP391.72 文献标识码: A DOI:10.3969/j.issn.1003-6970.2019.10.006
本文著录格式:曹子腾,郭阳,赵正旭,等. FAST馈源支撑系统三维可视化模型的创建[J]. 软件,2019,40(10):2529
Creation of Three-Dimensional Visualization Model for FAST Feed Support System
CAO Zi-teng1*, GUO Yang1, ZHAO Zheng-xu2, SUN Cai-hong3, ZHANG Qing-hai1
(1. Shijiazhuang TieDao University, Institute of Complex Networks and Visualsations, HeBei Shijiazhuang 050043;
2. School Of Mechanical and Automotive Engineering, Qingdao University of Technology, ShanDong Qingdao 266520;
3. Nation Astronomical Observatories of the Chinese Academy of Sciences, Beijing 100012)
【Abstract】: Native operating system is used by many specific enterprises and companies because of its security and reliability. The NeoKylin system is one of the native operating systems, and it is relatively mature. Blender is a cross-platform 3D animation production software, powerful and can be used in any mainstream operating system. Under the NeoKylin system, the 3D model of the Feed Support System, which is a part of the Five-Metre-Radio Telescope (FAST), is created by using Blender modeling software. Some of them are selected and their modeling process is introduced in detail.
【Key words】: NeoKylin; Blender; FAST; Feed support system
0 引言
Windows操作系统虽然因为其简单易用所以使用更加广泛,但是安全性较低,不适用于特定的单位或个人使用,比如涉及到国家机密的机关单位或政府部门。2013年的“棱镜门”和2014年Windows停止对XP系统的服务等事件让越来越多的人开始注重信息的安全问题。伴随着计算机技术的进步,各种网络信息的盗取手段也更加猖獗[1]。计算机操作系统对信息安全的影响尤为重要,已经成为我国进行现代化建设的核心战略科技之一[2],网络信息安全与隐私保护得重要性也日益凸显[3-4]。近年来,国产操作系统的发展取得了长足的进步,也因其更加安全可靠被越来越多的部门单位或个人使用。国产操作系统大部分是以Linux为基础进行二次开发的操作系统,近些年来发展十分迅速,相对Windows操作系统更加安全可靠。中标麒麟是国产操作系统中发展较为成熟,使用较为广泛的系统,是由两大国产操作系统“中标Linux”和“银河麒麟”合并后的新品牌。中标麒麟系统的桌面设置和Windows十分接近,安装软件等操作也更加简单和人性化[5-6]。
Blender是一款三维动画制作软件[7],开源且跨平台可用,可以使用在大部分操作系统上,例如Windows和Linux等常见的操作系统。
五百米口径射电望远镜(“天眼”,FAST)是具有我国自主知识产权的重大科技基础设施。是世界上最大的也是最灵敏的单口径射电望远镜[8],于2016年顺利完工。馈源支撑系统是FAST几大重要构成部分之一,因为FAST是我国自主研发的科技成果,其创建图纸等知识产权都需要严密地保护,所以创建模型时采用相对安全的国产操作系统——中标麒麟系统,在中标麒麟系统下,使用Blender对馈源支撑系统的一部分进行了三维模型的创建,将数据可视化[9-10],对其中六个馈源支撑塔之一以及索驱动部分建模过程进行了详细地介绍和成品展示。
1 FAST馈源支撑系统
“天眼”FAST坐落于贵州省平塘县克度镇大窝凼,因为此地独特的喀斯特地貌被选址于此,其口径为五百米。主要有四大組成系统,分别为主动反射面系统、馈源支撑系统、测量控制系统、接收系统[10]。馈源支撑系统又包括馈源舱、馈源支撑塔、索驱动、柔索等结构组成,是一个大跨度的刚柔耦合机构[11]。其中馈源舱是用来精确调整馈源接收机的系统[12],重约30吨,接收机主要用来准确收集接收到的脉冲信号等信息,所以对馈源舱的运动精度要求十分严格。馈源舱被六根柔性钢索[13]牵引在馈源支撑塔上,可以在一个直径约为200米的球冠面上运动[14]。馈源支撑塔共有六座,用来支撑馈源舱。六座塔分布在一个半径为600米的圆上,该圆圆心也是五百米口径球面的圆心,按顺时针排序分别为1H、3H、5H、7H、9H、11H,高度均超过100米,最高的塔高度超过179米,最低的塔也有约129米,塔顶平台海拔高度一致。索驱动部分又包括塔顶导向滑轮、塔底导向滑轮、地面卷扬机等部分构成,用来精确控制馈源舱的运动。FAST馈源支撑系统各部分位置分布如图1所示。
FAST是我国自主研发的科研成果,其图纸信息都被精密地保护,其中FAST馈源支撑系统是其中具有创新意义的一个系统,对其三维模型进行创建与对外展示,使用相对较安全的国产操作系统替换Windows操作系统是很有必要的。
2 馈源支撑塔的建模过程
“天眼”FAST馈源支撑塔是馈源支撑系统的基座,承载着驱动机构和柔性钢索等设施,共有六座,分布在一个直径为六百米的圆周上,命名依次为1H、3H、5H、7H、9H、11H,六座塔的分布如图2所示。由于FAST所处的天然的喀斯特地貌,为了使塔顶平面所放设备层的高度一致,六座塔的高度都不相同。本文对六座塔之一——3H的建摸过程进行详细介绍。建模过程分为竖直方向和水平方向两部分。
2.1 竖直方向上的建模过程
3H所处位置如图2所示,高度为161500毫米,整座塔纵向被分为了十八部分,分别根据图纸,在Blender对每一部分的三维模型进行创建。首先对第一部分与第二部分进行创建,其单线表CAD图纸的前视图和右视图如图3所示。
支撑塔3H主要由圆柱型钢管结构与角钢结构组成,角钢和圆柱型钢管的三维模型如图4所示。
支撑塔每座在竖直方向上共有四个面。第一部分与第二部分的“前后面”和“左右面”略有不同,主要不同之处在图3中所示L6-L8处与L9-L11处的
钢管的长度不同,所以偏转的角度也不相同。创建过程是:先对其中一个面进行创建。对整座塔每一根圆柱的创建都需要获得四部分信息,分别为:长度、直径、偏转角度、坐标。其中长度和直径在图纸中可以获得,偏转角度和坐标需要进行计算。为了方便建模过程中的坐标计算,初步选定图3中星型位置为坐标原点,这样可以求得每一根柱体的具体位置坐标,使得模型精确度更高。
例如图3中标号为①的圆柱体的创建过程:在对①号圆柱所在面进行创建时只需涉及到xoy面,已知①号圆柱体的长度为ls,高度为L5,利用反正弦函数可以计算①号圆柱体的偏转角度。计算公式为:
(1)
其中θ表示钢管偏转角度,h表示其所在梯形的高,ls表示钢管长度。,将高度L5与长度ls代入公式中可得与z轴偏转角度为5.71°(保留小数点后两位)。
坐标的计算需要根据几何图形关系计算,在①号圆柱体与②号柱体所处的等腰梯形中,上底长度已知,下底长度已知,高度已知,所以计算xz轴坐标的计算公式为:
(2)
将①号圆柱体的参数信息代入公式可得出其坐标为(–4450,–2900),同理可分别得出②号柱体坐标为(4450,–2900),单位是毫米。在Blender中将对应参数输入后创建相应模型,再将支撑塔3H的第一、二部分的其他柱体利用相似方法创建可得图5所示。
将整个面按相同方法创建好。竖直方向的面创建好后,需将整个面旋转5.71度,这时需要用到3D游标,将要旋转的面全部选中后,在下方功能栏中“Pivot center for rotation/scaling”选项由默认的“边界框中心”改成“3D Cursor”,随后在右方状态栏设置3D游标的坐标为(0,0,0),再使用旋转工具——“rotation”,设定好参数值5.71°即可以以设定好的3D游标位置为中心按设定的轴旋转。将四个面全部旋转后可得到竖直方向上的三维模型。
2.2 水平方向上的建模过程
竖直方向的三维模型创建好后,还需创建水平方向的三维模型,水平方向的CAD图纸共有两种分别如图6中所示。
水平方向上的三维模型创建好后,需要将其移动到对应高度位置,水平方向的三维模型如图7所示。
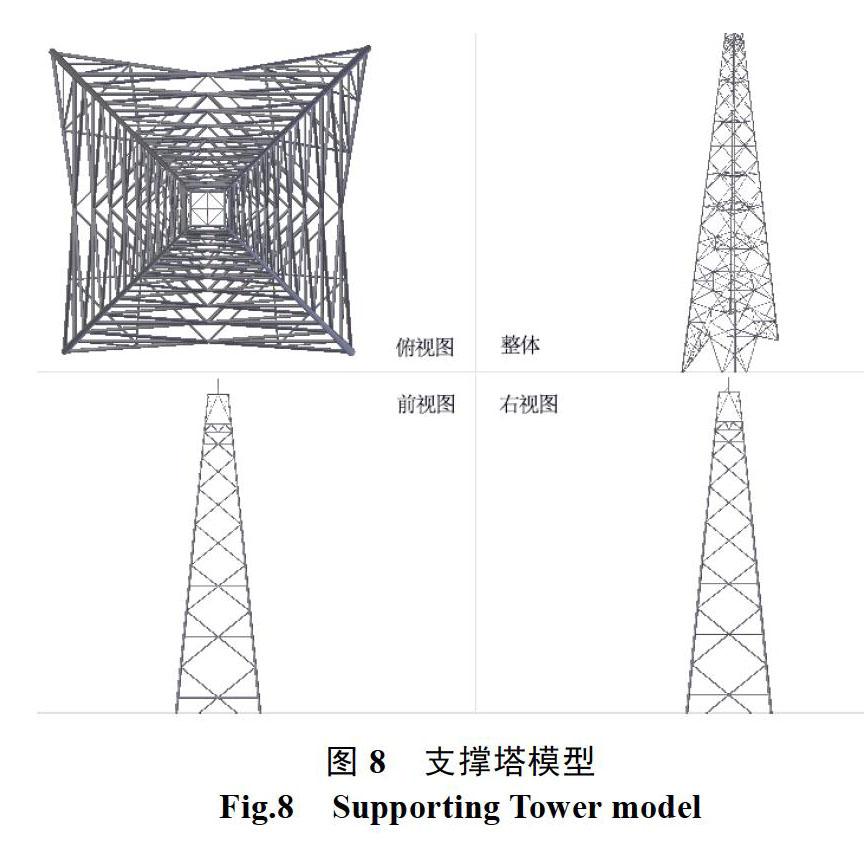
将竖直方向与水平方向上的模型全部创建好后,模型成品如图8中“整体”所示,三视图如图8中“俯视图”、“前视图”和“右视图”所示。
3 索驱动的建模过程
馈源舱由钢索连接到馈源支撑塔上,需要在一定范围的空间中运动,所以需要在支撑塔上安装索驱动,以此来精确控制馈源舱的运动。每个支撑塔上都有一套索驱动机构,每一套索驱动的主要部分包括塔顶导向滑轮、地面导向滑轮以及地面卷扬机等。地面卷扬机通过柔性钢索与地面导向滑轮相连,再与塔顶导向滑轮相连,继而连接馈源舱控制馈源舱的运动轨迹。对这三部分三维模型进行创建,并以塔顶导向滑轮为例,介绍建模过程以及过程中使用的一些基本建模方法。
3.1 塔顶导向滑轮
塔顶导向滑轮位于塔顶平台,位置如图1中所示。塔顶导向滑轮通过钢索与馈源舱连接,整体高度约为2700毫米,由滑轮、滑轮支座、上支座、中间支座、下支座、挡绳架和一些必要的螺丝钉等组成。以滑轮支座的模型创建为例,在滑轮支座的创建过程中,采用了添加“boolean修改器”的方法,实现了对所创建物体的切割等操作。距离流程为:先创建基础物体,在计算好所要切下部分的角度和长度以后,创建相应的辅助物体,旋转相应的角度,为基础物体添加修改器,在“Add Monitor”中,选择“boolean”,在“Operation”选项中选择差值“Difference”,然后在对象“Object”中用拾取器拾取准备求差的物体,再应用该修改器点击“Apply”,随后将辅助物体删除即可。在塔頂导向滑轮的滑轮支座创建中使用该方法创建完成后得到的模型如图9所示。
索驱动中有很多螺丝钉,用来衔接支座、挡绳架等部件,所以在模型的创建过程中螺丝钉也是关键部分。但是由于螺丝钉数量多,采用传统的一一创建的方法会消耗大量的时间,所以采用Blender中的“Array(阵列)修改器”,可以对规律分布的、大量的螺丝钉进行创建。流程为:在创建好一个螺丝钉后,选择“Add Monitor”,选择阵列修改器“Array”,计算好偏移量以后,在相对偏移中设置好偏移量,直接选择所需要的数目即可得到一组线性排列的结果如图所示。如果螺丝钉在滑轮上呈环形分布且分布规律,可以采用环形阵列的方式,选择阵列修改器“Array”,再创建一个空物体作为物体偏移的标准,将空物体缩放旋转就可以实现阵列的形状的角度的变换,两种阵列的效果如图10所示。
将整个塔顶导向滑轮创建完成后的三维模型如图11所示。
3.2 地面导向滑轮与塔底卷扬机
地面导向滑轮通过钢索与塔顶导向滑轮相连接。位置如图1中所示。地面卷扬机通过钢索与地面导向滑轮连接,用来控制绳索方向牵引地面导向滑轮进而牵引塔顶导向滑轮,从而牵引馈源舱,控制馈源舱的运动。地面导向滑轮与地面卷扬机的三维模型创建方法与塔顶导向滑轮的过程类似,主要都用到了修改器,例如修改器中的“boolean”和“Array”。二者的三维模型创建完成后如图所示。
4 结语
“天眼”FAST是具有我国自主知识产权的重大科研项目之一,在其建成并投入使用后,二维图片是远远不能将其每一部分都详细展示的,所以创建其三维模型是很有必要的。其中馈源支撑系统是FAST中具有创新意义的,也是FAST中不可或缺的一部分。因为FAST的图纸必须受到精密地保护,考虑到常用的Windows操作系统可能存在安全风险,所以采用了相对较为安全的国产操作系统中标麒麟系统,再使用跨平台可用的软件工具Blender对馈源支撑系统中的一部分进行了三维模型的创建,得到了较为精确的三维模型,可为今后对FAST的学习、研究和参观提供一种新的途径。
参考文献
[1]尚永强. 计算机网络信息安全中数据加密技术的探讨[J]. 软件, 2018, 39(12): 198-201.
[2]赵正旭, 徐博贤, 梅成芳, 钟谦. 月球探测器遥操作系统国产化研究[J]. 现代计算机(专业版), 2018(35): 86-89.
[3]黄堃. 基于计算机网络技术的计算机网络信息安全及其防护策略分析[J]. 软件, 2018, 39(6): 139-141.
[4]王刚. 基于云计算的大数据安全隐私保护研究[J]. 软件, 2018, 39(10): 60-63.
[5]吴金才, 张辛, 吴勇军, 李智. 国产操作系统的技术特点及应用范围研究[J]. 电脑知识与技术, 2015, 11(4): 94-95.
[6]陶智. 国产操作系统应用软件部署对策的探讨[D]. 石家庄铁道大学, 2017.
[7]刘和彬, 廖剑斌, 李华川, 苏茜. Blender虚拟现实环境下的工业机器人建模[J]. 轻工科技, 2017, 33(5): 77-78.
[8]李辉, 李庆伟. FAST馈源支撑塔结构优化设计[J]. 工程力学, 2017, 34(S1): 273-281.
[9]李晋宏, 袁媛. 铝电解槽状态可视化展示[J]. 软件, 2018, 39(12): 151-154.
[10]李晋宏, 戴海涛. 可穿戴设备数据挖掘及可视化技术的研究[J]. 软件, 2015, 36(12): 69-71.
[11]邓赛, 景奉水, 梁自泽, 杨国栋, 于东俊.FAST馈源支撑系统位姿分配方法研究[J]. 光学精密工程, 2017, 25(2): 375-384.
[12]賈彦辉, 李建军, 王宇哲, 李聪聪, 段艳宾. 大射电望远镜馈源舱的结构分析与数据处理[J]. 机械制造, 2014, 52(9): 18-21.
[13]訾斌, 段宝岩, 黄进. 大射电望远镜馈源柔索支撑系统的建模与控制[J]. 西安交通大学学报, 2006(6): 681-685.
[14]李铭哲. FAST馈源支撑舱索系统模型试验研究[D]. 贵州大学, 2015.