
基于SID算法的MEMS陀螺仪测控系统设计
2019-12-24 09:09王亚林杨拥军
传感器与微系统 2019年12期
王亚林, 杨拥军, 任 臣
(中国电子科技集团公司第十三研究所,河北 石家庄 050051)
0 引 言
微机电系统(micro-electro-mechanical system,MEMS)陀螺仪是一种基于哥氏力效应的角速度传感器,具有低功耗、小体积、低成本、易集成等优点,广泛应用于航空航天,汽车电子,机器人等领域[1,2]。传统的MEMS陀螺仪测控系统主要由模拟电路构成[3],由于模拟器件环境适应性、噪声性能较差,使得陀螺仪精度难以进一步提升。相比模拟测控电路,数字闭环测控系统具有集成度高、可靠性好、不易受环境温度影响、可实现各种复杂算法等优点,已成为MEMS领域的研究热点[4]。数字闭环测控系统包括驱动环路和检测环路,两环路中都需要解调相关信号以获取信号的幅值和相位信息,得到关键控制信号以便完成进一步控制和信号输出[5]。因此,解调算法的优劣直接影响陀螺的性能。
本文提出了一种同步积分解调算法,相比传统乘法解调[6],该解调方式抗噪声能力强,响应较快,硬件资源使用少。基于同步积分解调,设计了锁相环+自动增益控制(phase-locked loop+automatic gain control,PLL+AGC)双闭环驱动系统,实现了陀螺驱动模态谐振。
1 MEMS陀螺工作原理及测控系统设计
1.1 陀螺工作原理
MEMS陀螺原理图如图1所示。
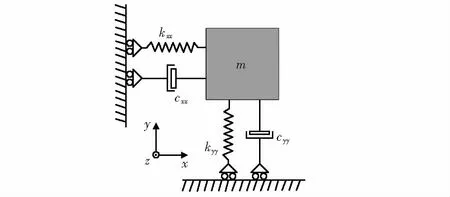
图1 MEMS陀螺原理
MEMS陀螺具有驱动和检测两个模态,两种模态均可看作二阶质量—弹簧—阻尼系统[7],其动力学方程为
(1)

(2)
陀螺工作时,保证驱动模态处于谐振状态,即ωd=ω,驱动、检测位移分别为
(3)
(4)
1.2 陀螺测控系统
本文检测模态采用开环方式。陀螺整体测控系统如图2所示。系统为一个数/模混合电路,模拟部分主要有电容电压(C/V)转换电路、放大电路、模/数转换器(ADC)等,数字部分主要有PI控制、(AGC)等。采用AGC+PLL方案,陀螺在驱动方向处于谐振状态。角速度引起检测位移y导致梳齿电容变化,信号经过C/V,放大电路,解调输出角速度信号。

图2 MEMS陀螺测控系统图
2 同步积分解调算法设计
由1.2陀螺测控系统系统原理可知,幅度和相位信息作为环路中的重要控制信号对系统功能实现至关重要,陀螺的驱动环路、检测环路都需要解调环路中的信号从而得到对应信号的幅度和相位信息。MEMS陀螺信号传统的解调方式是乘法解调,该解调算法抗噪性能较差,且解调信号伴随二倍频成分,其引入的低通滤波器导致系统相位延时。本文设计了一种新的解调算法即同步积分解调,实现陀螺驱动模态、检测模态的信号解调。
2.1 同步积分解调原理
同步积分器电路原理图如图3所示[8]。

图3 同步积分器电路
同步开关控制电阻R与C1、C2连接(开关高电平时R与C1连接,低电平时R与C2连接),设C1=C2,输入信号为
Vi(t)=A1sin((ωc+Δω)t+φ)
(5)
式中ωc为同步开关信号频率,Δω为输入信号与同步信号的频差
(6)
θ=arctg(2R1C1Δω)
(7)
(8)
为了较容易地获得输入信号的幅值和相位,只需要对当前通道1的同步积分电路添加另一路与之正交的通道2。通道2的输出电压可以表示为
(9)
因此,输入信号的幅值和相位表达式可以最终表示为
(10)
同步积分解调的实际结构如图4。
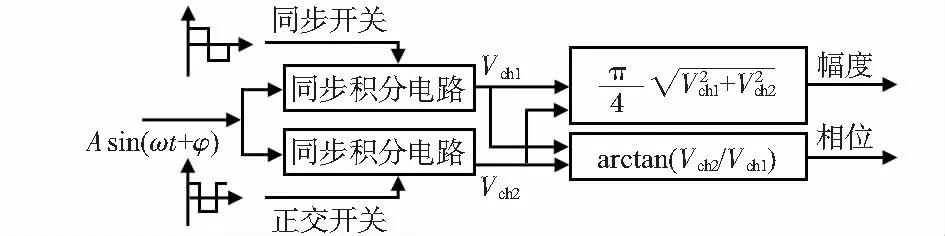
图4 同步积分解调结构
2.2 同步积分解调仿真
2.1中的分析基于一阶同步积分器,事实上同步积分器可以级联成多阶,多阶同步积分器具有更好的噪声抑制能力。本文采用三阶同步积分器。其传递函数为
(11)
解调带宽为Bw=0.194 28/(2RC),本文设计带宽为100 Hz。R=8 kΩ,C=15 nF。
分别设计了同步积分解调和传统的乘法解调并在相同的条件下仿真。乘法解调结构如图5所示[9]。

图5 乘法解调原理
输入信号为幅度1 V,频率4 096 Hz,初始相位30°的正弦波信号,经过同步积分解调和乘法解调输出信号的幅值如图6所示。图6表明,同步积分解调启动时间为8.4 ms,乘法解调启动时间为13.8 ms。

图6 解调输出
在以上正弦信号中叠加一个均值0 V,标准差0.05 V的高斯白噪声,对两种解调得到的信号进行频谱分析,得到频谱如图7所示。结果表明同步积分解调的信号幅值只有直流成分,而乘法解调存在明显的二倍频成分(如图虚线部分),这对解调速度和精度有一定影响。两种解调算法的抗噪声能力分别为-190,-140 dB。同步积分解调具有更好的抗噪声性能。
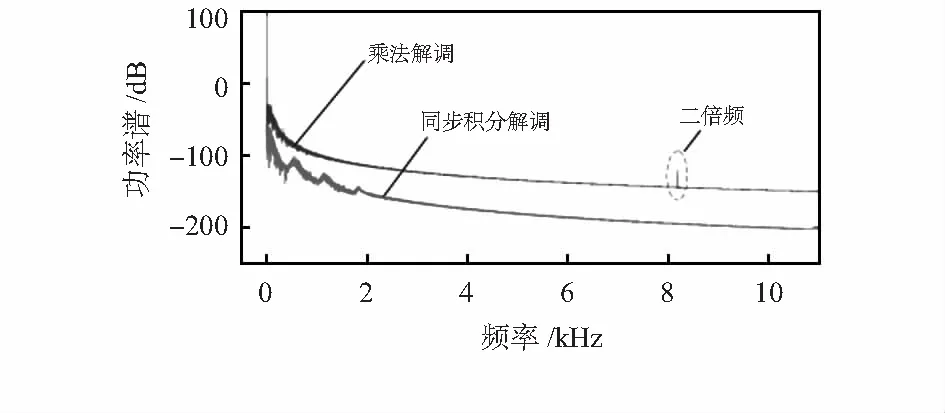
图7 信号+噪声解调输出频谱
3 闭环驱动系统设计
谐振式陀螺要实现角速度的精确测量,应保证陀螺质量块驱动幅值和频率的稳定性[10]。因此驱动模态采用闭环方式,本文设计了双闭环控制网络实现MEMS陀螺驱动振幅和频率的稳定控制。其中自动增益控制(AGC)闭环实现MEMS陀螺恒幅振动,数字锁相环(PLL)实现驱动频率及相位跟踪与控制。
3.1 自动增益控制[11]
陀螺驱动闭环AGC原理如图8所示。

图8 AGC系统结构
经典PI控制器,其传递函数为
(12)
当陀螺振动引起的电压变化幅值大于参考值Vref时,残差信号变成负值,PI控制器输出减小即驱动信号减小,陀螺振动角度位移减小;反之陀螺振动位移增加。通过AGC控制最终陀螺的振动位移将稳定在参考值Vref附近。
3.2 锁相控制
PLL是一个相位误差闭环控制网络,在MEMS陀螺驱动闭环控制系统中,锁相环控制陀螺驱动信号与驱动检测信号保持90°相位差,保证陀螺始终工作在谐振状态。PLL闭环控制如图9所示。
其中数字振荡器NCO根据输入信号产生两路频率可调、幅度稳定、相位正交的数字正弦信号。NCO传统的实现方法主要有查表法、多项式展开法、近似法等,但这些方法在速度、精度、资源方面难以兼顾。采用CORDIC算法,无需使用乘法器,利用简单的移位和相加运算,即可产生高精度的正余弦波形,尤其适合于FPGA的实现[12]。本文研究采用16级流水线结构的CORDIC算法实现数控振荡器。该数控振荡器的原理如图10所示[13]。

图10 NCO结构
时钟信号控制相位寄存器每次以累加,然后以其对应的角度值作为输入进行N次迭代运算。每一级迭代运算中加入寄存器,就得到并行流水线结构的CORDIC算法。CORDIC算法的迭代次数决定了相位精度,精度表示为θ=arctan(2-N)180/π。
输出信号的分辨率取决于相位累加器的位宽B,分辨率可表示为f=fs/2B。其中,B为相位累加器的位宽,fs为系统时钟频率。设输入频率控制字的字长为m,DCO的中心频率为,则该DCO输出频率范围为[fmin,fmax]fmin=f0+2m·fs/2B,fmax=f0-2m·fs/2B。该振荡器幅度量化误差为ΔV=2-(n-1)=2-15=3.052×10-5V。频率量化误差为Δf=fs/2B=100×106/232=0.023 Hz。在SIMULINK中建立完整的驱动闭环系统,仿真结果如图11所示。结果表明同步积
分解调可以用于MEMS陀螺中,陀螺起振时间为0.12 s,驱动位移为4.738×10-6m。

图11 驱动闭环仿真结果
4 结 论
本文设计了一种新的解调算法即同步积分解调,通过仿真该算法比传统乘法解调具有更好的噪声性能、更快的启动时间,基于该解调算法设计了MEMS陀螺双闭环驱动系统,采用AGC和PLL技术保证陀螺恒幅恒频振动。仿真结果表明陀螺成功起振。
猜你喜欢
中国船检(2020年11期)2020-11-27
小学生学习指导(低年级)(2019年10期)2019-10-16
学生天地(2019年6期)2019-03-07
军事文摘(2018年24期)2018-12-26
快乐语文(2018年36期)2018-03-12
黑龙江电力(2017年1期)2017-05-17
山东工业技术(2016年15期)2016-12-01
山东工业技术(2016年15期)2016-12-01
环境科技(2016年5期)2016-11-10
太空探索(2016年12期)2016-07-18
