
基于多属性分类的雷达目标跟踪算法*
2019-12-24 09:20张宇轩胡士强
传感器与微系统 2019年12期
张宇轩, 胡士强
(上海交通大学 航空航天学院,上海 200240)
0 引 言
无论在军事领域还是民用航空交通领域,雷达目标跟踪技术都有着广泛的应用。现代社会科技不断发展,尤其是各种电子技术飞速发展,推动了雷达跟踪精度的提升,随之而来的是雷达跟踪需要面对的日益复杂的电磁环境。此外,相关空域内的其他目标以及恶劣的天气也是干扰雷达跟踪的主要因素。如何尽可能有效排除这些干扰带来的影响,是提升雷达跟踪精度的重要方向之一。
传统的数据关联算法[1,2]由于计算量较大,组合爆炸问题会影响跟踪的实时性。而基于随机有限集的方法[3~5]把随机集内多目标的状态看成整体,避免了数据关联问题,不过在杂波过多的复杂场景下依然存在漏检虚警的情况。跟踪—学习—检测(tracking-learning-detection,TLD)是KALAL Z[6]提出的一种目标跟踪框架,用于对视频中单个物体的长时间跟踪。近年来已有基于这种框架的对雷达目标跟踪算法做出的改进[13],但仅限于对雷达两个属性的利用。雷达发射波在目标相互作用过程中会产生雷达目标散射波,而通过对散射波的频率、相位、幅度等信息进行处理可以获得对应跟踪目标的属性参数。在实际跟踪场景中,两个属性信息不足以应对数量众多且复杂的杂波环境。
本文引入多属性分类算法,通过处理雷达获取目标的多种特性参数,来改善已有算法在更为复杂更接近实际的场景下的精度不足问题。本文基于TLD框架,以传统高斯混合概率假设密度(Gaussian mixture PHD,GM-PHD)算法[7]作为跟踪器,多属性分类器支持向量机(support vector machine,SVM)[8]作为检测器,同时加入PN学习过程。在GM-PHD算法基础上,引入雷达获取的目标与杂波的多种属性信息,通过多属性分类器进行初步分类。而在PN学习过程中,利用目标的时空特性对分类器的分类结果进行校正,并更新分类器的训练集,同时对PHD的错误估计进行剪枝,以此实现目标跟踪的在线学习,提升杂波环境下的雷达跟踪精度。
1 多属性PN-PHD系统
本文提出的多属性分类目标跟踪算法主要基于计算机视觉领域的TLD算法框架,引入多属性检测与PN学习算法,实现目标的在线跟踪。整个系统主要由跟踪器、检测器、学习器三个模块构成。其中跟踪器采用传统的基于随机有限集的目标跟踪算法GM-PHD,检测器采用多属性下的支持向量机模型,学习器则是通过PN约束对分类结果进行评估。三个模块互相作用使得整个系统具有很强的鲁棒性和学习能力。
1.1 雷达目标跟踪
系统跟踪器模块采用GM-PHD算法。该算法假设目标的新生与衍生过程PHD都能表示为高斯混合模型。该算法将目标状态和量测数据分别看作是随机的单目标状态集合与单量测传感器集合,有效避免了数据关联。其主要算法流程如下:
1)预测:在预测阶段,目标状态函数表示为
(1)
预测PHD函数为
νk|k-1(X)=νs,k|k-1(X)+νβ,k|k-1(X)+νγ,k|k-1(X)
(2)
式中νs为存活目标的PHD,而νβ和νγ分别为衍生目标与新生目标的PHD。
2)更新:在更新阶段,目标PHD强度可记为

(3)

总的高斯分量个数
Jk=(1+|Zk|)Jk|k-1
(4)
1.2 雷达目标多属性分类
早期雷达将跟踪目标看成点目标,简单地获取目标位置、速度、加速度和运动轨迹等尺度量测信息,而随着高分辨率宽带雷达的诞生,跟踪目标更多地被当做体目标来研究[9,10]。通过对雷达目标散射波的回波幅度及相位等的处理变换,可以得到目标的载频、信噪比、雷达散射截面积(radar cross-section ,RCS)、散射极化矩阵、目标多散射中心等多种参数,这些参数就是雷达目标的特征测量参数。属性特征参数反映了目标的形状、体态、姿态和表面材料等物理特征,可以很好地用于目标的分类与识别。本文选取载波、信噪比、RCS、体积四个属性作为跟踪目标与杂波的分类特征信息。
Corinna Cortes和Vapnik提出的SVM方法是一种监督学习模型,在解决小样本和高维数据问题上有很好的表现。本文利用该算法将待分类的目标和杂波属性信息映射至更高维空间,通过核函数在高维空间中找到一个最优分割超平面,以完成目标和杂波的分类。跟踪开始阶段,多属性分类器利用先验数据和前几帧跟踪数据完成训练过程,得到分类器的初始模型。k时刻,系统将雷达获取的量测数据Zk输入多属性分类器,分类器将Zk进行初步分类,获得分类结果的置信度Lk。所有量测目标被分为正样本与负样本。而在学习模块中,属性分类结果将得到修正,修正过的分类结果被加入到训练集中,保证了分类器模型的在线更新,这也进一步提升了属性分类过程的准确性。
1.3 PN学习原理
PN学习是一种利用带标签与不带标签两种样本之间的结构性特征差异来训练并改善分类器性能的方法[11]。P约束用于修正被分类器错误标记为负的正样本,而N约束反之,修正被错误分类的负样本。在迭代过程中,PN分类器不断更新分类器的训练样本集,使得分类器的分类性能得到学习与增强。
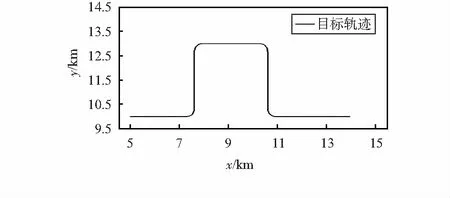
本文中的PN约束主要基于目标的时空特性,即目标的空间位置具有短时不变性,且在连续时间内具有变化缓慢的特点。K时刻GM-PHD跟踪器获得跟踪结果Xk,检测器获得分类结果——置信度Lk。其中置信度高于一定阈值L2的样本被认定为候选目标,低于一定阈值L1(0 图1 PN学习工作原理 1)跟踪器获取K时刻目标跟踪位置,以此为中心将量测结果划分为候选区内和候选区外;2)检测器利用雷达获取的目标多维属性特征信息将量测结果初步划分为目标(正样本)与杂波(负样本);3)PN约束利用目标时空特性对检测器分类结果进行更正,并完善检测器正负样本集,同时更新跟踪估计结果;4)利用新的正负样本集重新训练检测器的多属性分类方法,新的分类器结构被用于下一时刻的特征分类。算法框架图如图2所示。 图2 多属性PN-PHD算法框图 由图可知,多属性PN-PHD算法是迭代学习的过程。在每一时刻,检测器的错误分类结果在PN约束下被一定程度更正,同时检测器的分类能力在迭代过程中不断得到加强,使得整个系统具有良好的鲁棒性与学习能力,减少了传统跟踪算法在面对多杂波的复杂环境时漏检和错检的问题。 图3 真实运动轨迹 本文与基于随机有限集的GM-PHD算法以及二属性分类下的PN-PHD算法进行对比,验证多属性分类PN-PHD算法针对实际复杂杂波场景下目标跟踪的有效性。 分别采用三种跟踪滤波算法对雷达目标进行跟踪,在杂波数cn=25,50,75的三种杂波环境下进行仿真。采用阶次为2,阶段距离为2 km的OSPA距离[12]对三种跟踪滤波算法的精度进行评价。结果如图4~图6所示。 图4 cn=25时跟踪轨迹与OSPA距离曲线对比 图5 cn=50时跟踪轨迹与OSPA距离曲线对比 图6 cn=75时跟踪轨迹与OSPA距离曲线对比 计算三种条件下各算法的OSPA距离平均值,如表1。 表1 平均OSPA距离对比 平均OSPA距离越小,则表明跟踪算法的跟踪精度越高。观察可知,杂波环境下二属性PN-PHD算法相对传统GM-PHD算法跟踪性能有所提高,但由于杂波环境比较复杂,所以提升并不明显,而获取更多目标信息的多属性PN-PHD算法则能够更准确地跟踪目标。而且随着杂波数的增加,雷达目标跟踪难度增大,二属性PN-PHD和传统GM-PHD算法算的算法精度下降很快,本文提出的多属性PN-PHD则仍然保持了不错的跟踪精度。事实上,在雷达实际工作中,需要面对更为复杂多变的杂波环境,简单的二属性检测往往无法实现目标与杂波的有效分类,多属性检测的实质则是引入了更多有效信息,拓宽了样本空间的维度。结合目标更高维度下的属性特征,整个跟踪系统得以刻画数据更为丰富的内在信息,从而实现跟踪精度的提升。 本文针对TLD框架下的PN-PHD算法在实际场景中二属性分类器无法有效分类,导致跟踪精度受到影响的问题,引入了机器学习中的多属性分类器。该算法充分利用多属性分类器的优势,采信更多的雷达数据信息,实现了复杂环境下雷达对目标状态更为稳定精确的跟踪。且在线迭代学习使得该算法具有很强的鲁棒性,有一定的工程应用前景。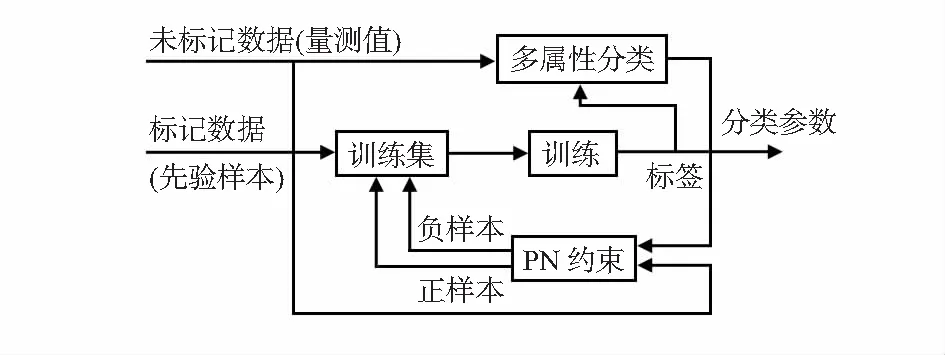
2 多属性PNPHD算法流程

3 仿真实验
3.1 仿真条件


3.2 仿真结果




4 结 论
猜你喜欢
科学与信息化(2021年30期)2021-12-24
火力与指挥控制(2018年10期)2018-11-13
计算机应用(2017年4期)2017-06-27
中国交通信息化(2017年9期)2017-06-06
电子制作(2017年10期)2017-04-18
光学精密工程(2016年4期)2016-11-07
光学精密工程(2016年3期)2016-11-07
工业设计(2016年11期)2016-04-16
西北工业大学学报(2015年3期)2015-12-14
遥测遥控(2015年2期)2015-04-23
