加油站油气回收气液比的闭环控制方法
2019-12-26 03:21修德欣
石油化工自动化 2019年6期
修德欣
(中国石油化工股份有限公司 青岛安全工程研究院,山东 青岛 266071)
石油产品在生产、储存、运输、销售和使用过程中均会产生一定程度的排放,不仅污染环境,而且造成了资源浪费[1-4]。加油站作为油品储存和销售的场所,站内的油气排放一直都受到环保部门的重点管控。现阶段,中国多数加油站已经完成二次油气回收改造,在加油的同时通过油气回收真空泵将油箱口附近的逸散油气回收到埋地油罐的气相空间内,加油过程中回收气体的体积与加油体积的比值称为气液比,是体现设备运行状态的重要参数[5]。从油气回收原理上来讲,气液比越高,加油过程中的油气回收就越充分[6],但过高的气液比又会造成埋地油罐压力升高,导致额外排放。因此GB 20952—2007《加油站大气污染物排放标准》规定,加油站油气回收系统的气液比范围应为1.0~1.2。
虽然国内加油站油气回收工作已开展多年,但设备运行的稳定性仍是困扰加油站环保工作的一个重要问题[7-8]。加油枪、同轴胶管、气液比控制阀、油气回收真空泵等设备互相影响,在应用过程中只有通过人工测试和调节保持气液比的稳定,一旦单体设备出现故障,会引起整个油气回收系统气液比的漂移。为保障气液比达标,各油品销售企业和加油站投入了大量人力物力开展检测和维保工作,但依然效果不佳。
1 机械式气液比调节方式的问题
现阶段二次油气回收系统的气液比主要通过机械式控制阀调节,图1为一种典型的机械式控制阀结构。未加油操作时,阀芯在弹簧的作用下将气体流道和液体流道封堵;加油操作时,燃油在液体流道中形成压力,将弹簧顶开,阀芯右移,气体流道和液体流道同时打开。该阀通过粗调旋钮和细调旋钮控制流道的开度,开度不同,对应的气体流经控制阀时的气阻不同,从而起到调节回气量的作用。
机械式控制阀的主要问题在于难以在长期的使用过程中保持稳定,在燃油的长期冲击下,弹簧的弹性系数、阀芯的密封程度、调节旋钮的位置等均会发生微小的变化,导致气液比的漂移。
除控制阀外,油气回收型加油枪和真空泵也均为动态设备,在使用过程中均会面临外界环境变化和设备老化引起的气液比波动问题,甚至在前后2次的加油操作中也难以保持气液比的恒定。

图1 机械式控制阀示意
2 气液比闭环调节系统总体设计
为克服气液比漂移问题,拟采用一种闭环反馈式控制方法,对气液比进行实时控制,使气液比在动态加油过程中保持在设定值附近。
气液比闭环调节系统必然要采用电子式的气液比调节设备[9],目前电子式气液比调节设备分为两种[10]: 一种通过控制电磁比例阀的开度来控制回气阻力,从而调节气液比;另一种则通过控制变频真空泵的工作频率来改变抽气真空度,达到调节气液比的目的。近年来变频真空泵因其运行稳定、使用寿命长的特点取得了广泛的应用,因此本文设计的气液比闭环调节系统选用变频真空泵的调节方案。
油气回收气液比闭环调节系统如图2所示,主要包括气体流量计、控制主板、变频真空泵、液晶屏、蜂鸣器、手抄器等,其中控制主板按照功能模块分为输入模块、声光显示模块、存储模块、通信模块、气液比控制模块、ARM处理器。

图2 油气回收气液比闭环调节系统原理示意
系统采集的气液比信号来自于加油机计量流量计和安装在气路的流量计,气体流量计是气液比闭环调节系统的核心传感器,用于监测加油过程中的回气流速。输入模块用于采集加油机计量流量计和气体流量计的脉冲信号,并将脉冲信号转换为数字信号;ARM处理器对数据进行处理,得到实时的气液比数据;气液比模块可根据设定值,并参考实时气液比数据调节变频真空泵的频率,使实时气液比保持在1.0~1.2。加油结束后,存储模块可以存储本次加油操作的开始时间、结束时间、加油量、回气量、气液比、平均加油流速、平均回气流速等数据,支持数据读取和储存。液晶屏和蜂鸣器用于显示当前的油气回收信息和提示报警内容。通信模块支持RS-485通信方式,可与外部设备进行数据传输;通信模块具备手抄器接口,手抄器可设定气液比目标值、采样周期、报警范围等。闭环控制主板的控制流程如下:
1)数据采集模块检测到加油机计量流量计发送的加油脉冲,判断新的一笔加油操作开始。
2)控制主板按照设定的数据采集周期和目标气液比等参数,采用闭环控制算法调节变频真空泵的频率。
3)当数据采集模块检测到无加油脉冲,判断加油过程结束,存储模块储存本次加油的加油量、回气量、气液比、平均加油流速、平均回气流速等信息。
4)判断本次加油过程中是否出现平均加油流速小于15 L/min或气液比小于1或气液比大于1.2 的情况。若是,则根据这3类情况发出蜂鸣报警,液晶屏显示相应的报警信息,本次闭环调节结束;若否,则本次闭环调节直接结束。
3 气液比闭环控制算法
变频真空泵的转速使用方波频率控制,变频真空泵的转速存在低频无效区间和高频饱和区间,当调节信号的频率小于最小频率时,变频真空泵停转;当变频真空泵的调节信号频率大于最大频率时,转速不再增加,在最大值与最小值区间内,调节信号的频率与变频真空泵的转速存在线性关系。
闭环调节原理如图3所示,将气液比作为系统的目标控制参数,给定值为目标气液比值,GB 20952—2007中规定的气液比为1.0~1.2,因此将气液比调节目标初始值设置为1.1,给定值可通过上位软件与数据采集控制器的通信而更改。反馈值是根据实时累计的回气流量和加油流量计算得到的真实气液比。控制器通过方波输出控制变频真空泵的频率,从而控制回气管路的流速,消除反馈值与给定值之间的偏差。这样整个气液比调节过程就构成了一个闭环控制系统,该控制方法增加了系统的稳定性和自我调节能力。

图3 闭环调节原理
气液比闭环算法流程如图4所示,在闭环控制主板中,数据的采集和控制是不连续的,而是以一定的采样间隔进行离散控制,采样间隔为T,对算法离散化后,在k时刻控制器输出方波频率可表述为
(1)
式中:uk——控制器输出方波频率;vvapork——实时气体流速;voilk——实时加油流速;P——方波频率与真空泵频率的比例系数;R——给定的气液比目标值。

图4 气液比闭环算法流程示意
4 控制效果测试分析
在实验室初步测试后,为验证整套设备的控制效果,在某加油站实施气液比闭环控制改造,气液比数据采集依托加油站油气回收在线监测系统。闭环控制改造中将原有定频式油气回收真空泵更换为变频真空泵,在气路铜管中安装气体流量计,闭环控制主板安装在加油机主板箱内,其他各单体设备均按照图2所示流程连接,通过手抄器设置气液比调节目标值为1.1。
作为比对数据,通过加油站油气回收在线监测系统分别记录了2把加油枪进行闭环改造前的100笔加油操作的气液比值,结果如图5所示。

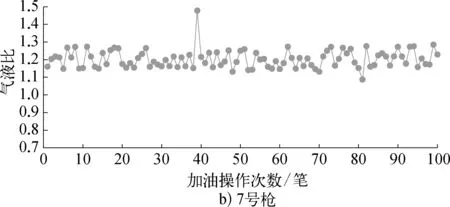
图5 未进行闭环改造加油枪气液比情况
5号加油枪气液比平均值为1.083,气液比最大值为1.175,最小值为0.954,气液比方差为1.1×10-3,合格率为98%。7号枪气液比平均值为1.203,气液比最大值为1.478,最小值为1.087,气液比方差为2.7×10-3,合格率为50%。标准规定的气液比合格范围为1.0~1.2,未进行气液比改造的加油枪气液比波动范围普遍会超过±0.2,因此即使人工调节的气液比值在合格范围内,也可能在不同的加油操作条件下因设备的波动导致气液比超标。
完成闭环控制改造后,对相同2把加油枪也分别记录了100笔加油操作的气液比值,结果如图6所示。5号枪气液比平均值为1.113,气液比最大值为1.131,最小值为1.101,气液比方差为4.4×10-5,合格率为100%。7号枪气液比平均值为1.110,气液比最大值为1.120,最小值为1.104,气液比方差为1.5×10-5,合格率为100%。


图6 闭环改造加油枪气液比情况
闭环改造后加油枪气液比波动明显降低,比闭环改造前的加油枪方差降低了2个数量级,气液比稳定性显著提高。同时气液比基本都稳定在设定值1.1附近,气液比合格率均为100%。从测试结果来看,采用闭环控制方法取得了良好效果,能够满足现场应用的需求。
5 结束语
传统的气液比控制方法存在大量的扰动量,导致气液比参数无法长期保持稳定。本文通过闭环控制主板、气体流量计和变频真空泵等设备对原有的油气回收设备进行了改造升级,使气液比控制由原有的开环系统升级为闭环控制系统。该算法和硬件系统经现场实际测试,能够将气液比稳定控制在1.1附近,降低了气液比的波动,显著提高了气液比的合格率和稳定性。该方案用于加油站现场可保障油气回收设备稳定达标,避免了超标排放。
猜你喜欢
水泵技术(2022年2期)2022-06-16
北京航空航天大学学报(2022年5期)2022-06-06
设备管理与维修(2022年6期)2022-04-22
北京航空航天大学学报(2021年9期)2021-11-02
水泵技术(2021年2期)2021-07-31
北京航空航天大学学报(2021年6期)2021-07-20
中国特种设备安全(2019年9期)2019-12-03
造纸信息(2019年7期)2019-09-10
电子制作(2018年11期)2018-08-04
北京航空航天大学学报(2017年11期)2017-04-23