基于改进边缘检测的加油锥套识别∗
2019-12-27 06:32陈朝阳
计算机与数字工程 2019年12期
张 涛 陈朝阳
(西安中飞航空测试技术发展有限公司 西安 710089)
1 引言
空中加油技术可极大提升作战飞机的远程作战能力,已成为未来空中加油技术的发展趋势。飞行过程中对锥套的识别是一个很重要的环节[1],加油机、天空以及锥套的颜色受光照、云层等因素影响较大,图像边缘信息变化范围较大,很难有固定的阈值来确定锥套的颜色变化范围,给锥套的提取带来了困难[2]。
本文采用双边滤波[3]方法代替传统的canny边缘检测中高斯滤波[4]的方法,引入多次迭代法来求取双门限阈值,使得阈值的选择更能符合图像的要求,并在一定程度上降低了噪声的干扰。通过实验结果分析可知,此方法可以得到较好的边缘检测结果,不仅提高了图像中弱边缘的检测准确度而且可以有效地抑制噪声。
2 传统canny边缘检测方法
传统canny边缘检测中使用高斯滤波方法对图像进行平滑处理,以减少噪声对图像的影响。高斯滤波函数的表达式[5]为

其中,σ为方差。使用不同方差的高斯滤波卷积模板对图像进行滤波,得到的结果如图1所示。
从图1可知,锥套与飞机以及天空的颜色很接近。当使用较小的σ进行滤波时(如图(a)),能够保留图像的边缘信息,但对图像噪声的处理能力就会变弱;当使用较大的 σ 滤波[6]时(如图(c)),图像噪声变弱,但图像会变得过度平滑,造成边缘信息的的丢失。为了克服这种问题,本文采用改进的双边滤波的方法代替传统的canny边缘检测中高斯滤波的方法。

图1 不同阈值滤波
3 基于改进的双边滤波去噪方法
双边滤波模板主要由两个模板生成,第一个是高斯模板,第二个是以灰度级的差值作为函数系数生成的模板,这两个模板点乘就得到了最终的双边滤波模板。双边滤波既利用了几何信息又利用了像素信息来定义滤波窗口的权重[7],像素值越接近,权重越大。表达式为

其中,(i,j)为当前像素点的横纵坐标,k,l为中心点的坐标;f(i,j)当前点的像素值,f(k,l)为中心点的像素值。δd,δg分别为空间距离以及灰度距离的标准差。
通过式(2)可知,当双边滤波的模板中心像素点是一个噪声点时,f(k,l)的像素值与邻域范围内的目标点f(i,j)的像素值会有较大的差异,会导致灰度信息的权重变小[8],从而不能去除图像中的噪声。
因此,采用模板区域内像素点灰度值的平均值代替模板区域中心点的灰度值来改善这种情况。改进的双边滤波的权重系数的表达式为

其中,(xp,yp)为模板区域内的像素点灰度值的平均值。

其中,n为采用的滤波模板中像素点个数。
假设滤波窗口区域的中心点不是噪声点,那么模板区域内的像素点的平均灰度值 f(xp,yp)与中心点的灰度值f(i,j)不会相差很大,这样对图像进行滤波时,同样可以起到双边滤波器的效果。
4 多次迭代法设定高低门限值
在实际的飞行过程中,图像的噪声、亮度等信息是随时变化的,使用设定的好的阈值并不适合对图像的实时处理[9]。由图像跟踪中分类器的方法想到,通过图像的直方图信息得到合适的阈值,再引迭代的思想,随着锥套的不断变化实时的更新阈值从而保证其能够适应时刻变化的图像信息[10]。假设图像在范围[0,G]内有L个灰度级,那么可以定义:

其中,rk是区间[0,G]内的第k级亮度,nk是灰度级为rk的图像中的像素数。使用所有元素h(rk)除以图像中的像素总数n所得到的图形:

其中,k=1,2,…,L。假设直方图中最大和最小波峰的的灰度值分别为T1和T2。则图像的阈值T0:

那么使用T0将图像分割得到新的两组像素,G1由灰度值大于T0的所有像素构成,G2由所有小于等于T0的所有像素构成。计算G1和G2范围内的像素的平均灰度值得到m1和m2。其中:
那么,通过计算得到一个新的阈值T为

如果得到的T满足T≤T0,那么就将得到的T作为图像中的高阈值,否则,将继续通过上述计算得到一个新的T,直到满足T≤T0这个条件为止。
5 实验结果与分析
使用改进的canny边缘检测方法对锥套图像进行处理,并同传统的canny边缘检测方法的结果进行对比分析。为了使检测的效果更直观明显,对原始的灰度图像加入3%的椒盐噪声[11]如图(b)所示。对加入噪声的新图像分别进行高斯滤波和改进的双边滤波处理,得到的结果分别如图(c)和图(d)所示。最后通过对图像进行边缘检测结果如图(e)和图(f)所示。

图2 处理结果对比
使用图2中(f)图的图像进行处理,通过开闭运算[12]操作后如图3(a)所示,对图像边缘的点进行椭圆拟合[13],所得结果如图3(b)所示。
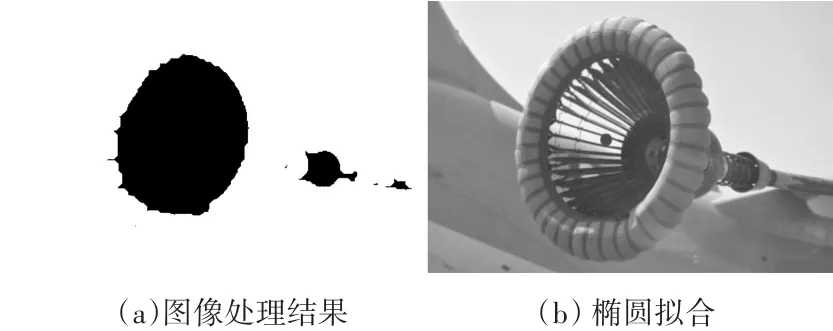
图3 处理结果
从图像的对比可知,改进的双边滤波由于考虑了邻域范围内像素的灰度值之间的关系,在保留图像的细节[14]和去除噪声的效果方面要优于高斯滤波的效果。通过最后的检测结果可以看出,改进的canny边缘检测得到的结果受噪声影响小,并且改进的双阈值选取方法[15]使得检测得到的图像边缘较完整,其最终检测效果要优于传统的canny边缘检测。
此方法在实际的飞行应用中如图4所示。

图4 实验中对锥套进行跟踪
图4为美国大黄蜂战机在空中加油的视频[16],实验中对锥套进行跟踪,使用本文方法参与锥套中心的检测,并进行高低阈值的计算,可以准确地提取出锥套中心的边缘信息,效果明显。
6 结语
本文对传统canny算法中的滤波和双阈值选取的方法进行改进,提高了在复杂多变的机载环境中的应用性,采用改进的双边滤波方法代替传统的高斯滤波方法实现对图像的去噪,并在高低阈值的选取方法上,采用多次迭代法实现图像的高低阈值的选取,避免了设定的阈值不符合图像要求的局限性使之能够更好地应用在机载环境中。实验结果表明本文的算法可以很好地抑制噪声并可以保持边缘的连续性,并且高低阈值选取的方法对于实时变化的机载环境有着很好的适应性。为以后机载设备进行图像实时处理打下了坚实的基础。
猜你喜欢
兵器装备工程学报(2022年8期)2022-09-13
北京航空航天大学学报(2022年6期)2022-07-02
重庆大学学报(2022年2期)2022-02-28
建材发展导向(2021年19期)2021-12-06
计算机仿真(2021年6期)2021-11-17
集装箱化(2021年1期)2021-04-12
智能计算机与应用(2020年4期)2020-08-31
中国信息技术教育(2020年2期)2020-02-02
北京航空航天大学学报(2019年9期)2019-10-26
电子制作(2019年9期)2019-05-30