
激光通信用潜望式跟瞄转台伺服系统设计
2020-01-07 10:42龚文张立中白杨杨王天宇
长春理工大学学报(自然科学版) 2019年6期
龚文 ,张立中,白杨杨,王天宇
(1.长春理工大学 空间光电技术国家地方联合工程研究中心,长春 130022;2.长春理工大学 空地激光通信技术国防重点学科实验室,长春 130022;3.长春理工大学,机电工程学院,长春 130022)
卫星激光通信是以激光作为载波,建立星-星、星-地之间的通信链路,实现微波无法达到的高速率、大数据的信息传输[1]。由于在进行卫星激光通信时,存在通信距离远、光束发散角小、激光器功率有限以及通信环境恶劣等问题,使得对目标光束的捕获、跟踪、瞄准(Acquisition,Tracking and Pointing,ATP)技术显得尤为重要,这直接决定通信链路能否建立以及通信质量的优劣。其中跟踪环节更是决定激光通信能否稳定进行的关键因素[2-4]。
潜望式卫星通信终端的结构形式不同于传统的十字跟踪架结构,它是由互相垂直的方位轴、俯仰轴以及与它们固连的两个45°平面反射镜组成,使得天线在随方位轴和俯仰轴的联合转动时可以指向三维空间的任一方向,从而满足激光通信方向任意性的要求。潜望式粗跟踪结构具有温控设计简单、光学系统使用寿命长、转动惯量小、体积小等优点,适合放置在卫星舱室内,以此进行星-星、星-地之间激光通信[5]。
有刷直流力矩电机存在结构复杂、噪声大、换向冲击、寿命短和电刷摩擦等问题,不适合星间维修设备的要求。而永磁同步电机具有体积小、功率密度高、转矩电流比高、使用寿命长等优点,满足星载狭小空间的驱动要求。并且永磁同步电机无电刷,使用电换向,在换向时无换向转矩波动,可保证输出力矩平稳和低速平稳性[6-7]。因此选择永磁同步电机作为潜望式卫星通信终端的驱动机构。
本文是针对潜望式粗跟踪结构,在对轴系采用直接驱动方式和选择永磁同步电机作为执行机构的条件下,设计基于ARM和FPGA的伺服控制器,并进行低速平稳性测试,来检测系统的低速性能。然后在文献[8]的基础上,利用平面镜反射矩阵和轴系旋转矩阵建立粗跟踪模型,解出目标光束在CCD相机中的脱靶量与粗跟踪转台轴系旋转增量之间的函数表达式,据此设计跟踪算法实现对目标光束的精确跟踪。
1 伺服控制系统设计
1.1 硬件系统搭建
潜望式卫星通信终端控制器采用ARM+FPGA的硬件架构,如图1中所示。在本伺服控制器中,ARM选择使用ST公司的32位处理器STM32F407作为主控器。STM32具有强大双浮点单元,主要用于浮点数据的计算,负责完成控制算法、闭环运算等功能;FPGA选择使用Altera公司的EP3C40F324作为协控制器。FPGA具有强大的高速并行处理能力,所以主要用于外围接口的数据传输,负责完成增量式编码器的解码、上位机通信、AD采集以及PWM产生等功能。驱动芯片选择使用TI公司的智能驱动器DRV8312,具有体积小、驱动能力大、涌流保护能特点。电流传感器选择使用LEM公司的霍尔电流传感器LTS06-NP。位置反馈元件选择Renishaw公司的16200000线的增量式圆光栅。
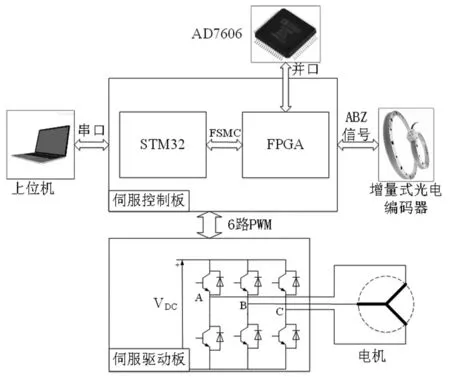
图1 系统硬件架构图
1.2 软件系统搭建
在ARM+FPGA的控制架构中,ARM作为一个主控制器,通过FSMC接口与FPGA进行通信,此时就把FPGA当作ARM外部的SRAM,去读取其中的所需数据。在ARM设计一个频率为20 kHz的定时器,在定时中断处理时程序中周期性从FP-GA中读取当前位置数据以及电流采样值,并以此顺序进行位置环闭环算法、速度环闭环算法、磁场定向控制(FOC)、电流环闭环算法和空间矢量控制(SVPWM),得出三组PWM控制信号,最后再通过FSMC接口发送给FPGA。如图2所示为ARM程序流程图。
FPGA作为一个协控制器,负责一系列外围接口的数据传输,主要包括AD采样、PWM输出、ABZ信号解码以及上位机通信等。根据自顶向下的模块设计方法,将FPGA负责完成的功能进行模块划分进行单独功能的实现与验证,最后在顶层文件对这些单独的功能模块例化调用,从而完成一个整体功能的设计。根据功能将其分为:ABZ解码模块、PWM输出模块、AD采样模块以及通信模块。
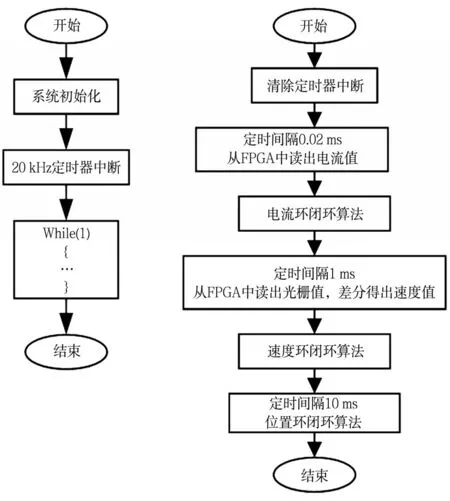
图2 ARM程序流程图
ABZ解码模块针对增量式光电编码器输出的正交编码信号进行解码,获取当前时刻下电机的相对位置,然后根据M测速法计算当前时刻电机转速,从而进行位置闭环和速度闭环。增量式光电编码器是一种旋转式角位移检测装置,它是将机械角度转为电脉冲,当电机转过一定的角度,编码器就会输出一定的正交脉冲,其输出的脉冲如图3所示。A、B信号是相位相差90度的正交方波脉冲,其脉冲数代表电机转过的角度,A、B信号的相位关系代表着电机的转向。Z信号是零位信号。因此在ABZ解码模块中,主要包括四倍频、鉴相和计数三个部分。主要功能如图3所示。

图3 ABZ信号及解码流程
PWM输出模块负责根据ARM经过SVPWM计算出的三组PWM占空比,产生三组互补的PWM波。该模块中设计一个频率为20 kHz的增减计数的三角波,然后将经FSMC接口传输过来三组PWM占空比赋值到三个PWM产生器的比较寄存器CMPx上,使三角波计数器的计数值CTR与比较寄存器的值CMPx相比较:当CTR<CMPx时,PWM输出置低;当CTR>CMPx时,PWM输出置高。其互补PWM波与其相反,从而可以产生三组互补的PWM波。如图4所示为6路互补PWM产生模块。并且为了避免由于驱动芯片DRV8312的上下桥臂同时导通造成芯片损坏,需要对PWM波死区处理。一般情况下,死区时间设置为5μs。
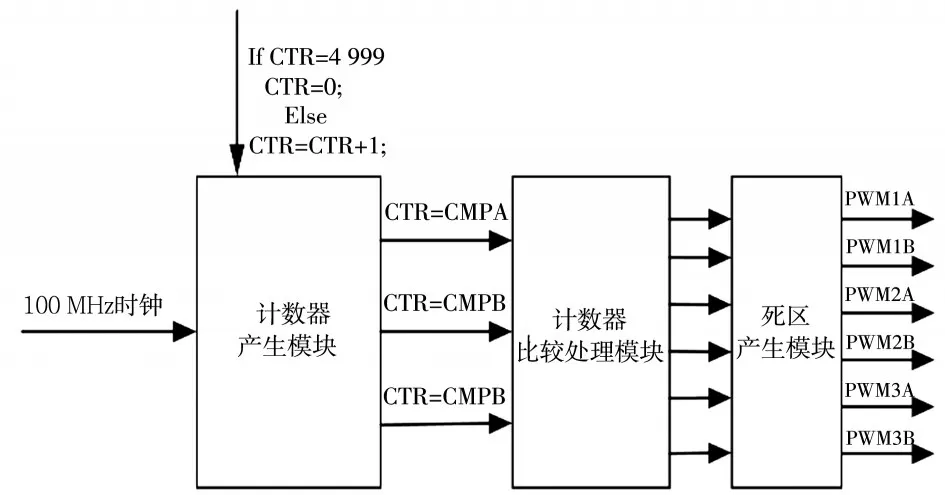
图4 6路互补PWM产生模块
在进行AD采集时,选用ADI公司的16位同步采样芯片AD7606。它具有8个采集通道,能处理±10 V和±5双极性输入信号,最高采样速率可达200K,能满足对电流高速采样和多通道的需要。如图5所示为AD采集的RTL图。在AD采样模块中,根据AD7606的时序进行编写。在本设计中,AD7606以最高速率200 kHz进行模数转换,然后采样的数据进行10次的均值滤波后,由ARM的定时处理程序进行周期性的读取AB两相相电流以进行FOC处理。同时为了保证系统的可靠性和安全性,需要实时检测系统的故障信号,并对相应的故障信息进行处理,故不仅会对AB两相相电流进行采样,同时会对ABC三相相电压、总线电压、总线电流、温度信息进行AD采样,一旦AD采样结果超出预设值,就会立即停止PWM输出,使得驱动电路的桥臂关闭,保护系统安全。
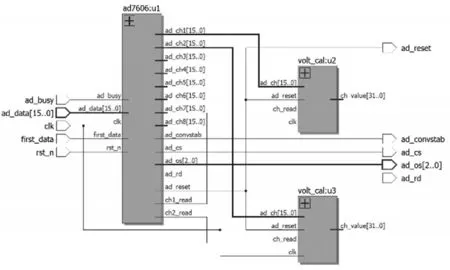
图5 AD采样模块
2 潜望式跟瞄系统控制策略设计
2.1 三相永磁同步电机的控制原理
作为一个多变量、强耦合的非线性系统,一般选择空间矢量控制方法进行三相电流的解耦来实现对电机的控制[9]。空间矢量控制方法的基本思想是通过坐标变化的方法,把永磁同步电机模拟成直流力矩电机进行控制。在磁场定向坐标中,将电流矢量分解成产生磁通量的励磁电流分量id和产生转矩的转矩电流分量iq,二者互相垂直、互相独立,从而可以进行分别调节控制[10]。如图6所示为永磁同步电机矢量控制原理框图。
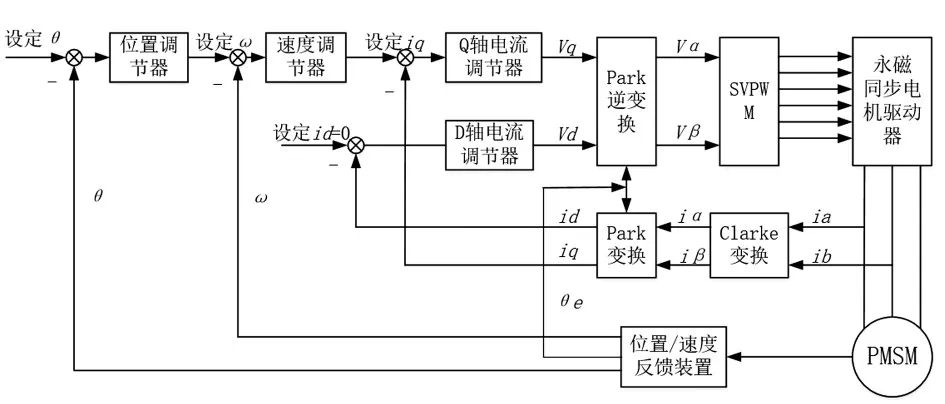
图6 永磁同步电机矢量控制原理框图
2.2 系统扫频测试与模型辨识
通过编程使电机控制板产生离散的一定频率的正弦波信号,经电机驱动板驱动电机使得电机做正弦摆动,同时利用增量式光电编码器获取电机的转速,并与电脑相连接记录速度信息。不断改变正弦波信号的频率,重复之前的过程,之后采用相关分析法进行数据处理,绘制伺服系统开环BODE图从而辨识出系统的传递函数。
在本文中按照图7所表示的方案进行频响测试,断开速度控制器对系统施加电流正弦扫描信号,此时系统是对电机、机械耦合部分、功率放大模块以及电流环进行扫频测试。且因电流环带宽较高,多数都大于100 Hz,因为对扫频结果基本无影响[11]。

图7 频响测试方案
以方位轴系为例,给出方位轴系的频率特性曲线如图8所示,其谐振频率为57.4 Hz。

图8 方位轴系频率特性曲线
获取了方位轴系频率特性曲线之后,采用参数递阶辨识[12]的方法获取其相应轴系的传递函数。具体方法是根据之前得到的频率特性曲线,先对低频环节进行参数辨识,然后针对高频段存在的谐振环节进行逐一辨识,最终将各个环节结合获得较为误差较小的系统传递函数。如图9所示为方位轴系辨识曲线。
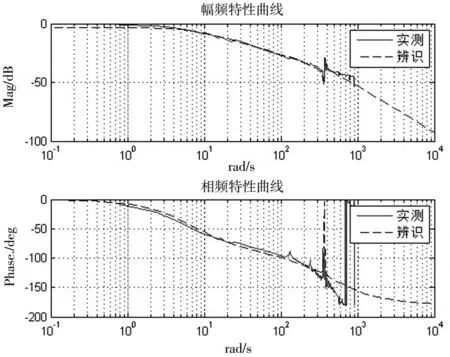
图9 方位轴系辨识曲线
并获得方位轴系的传递函数:
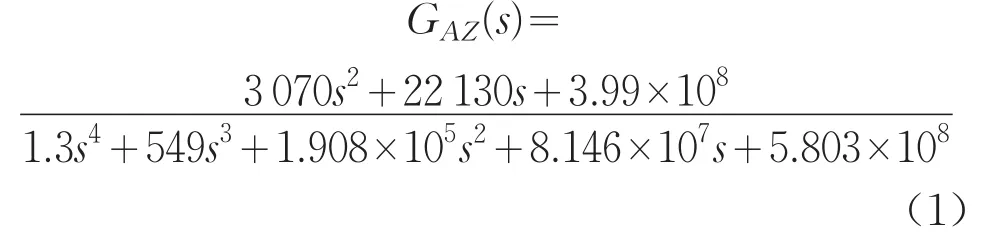
其中,s为复数变量。
2.3 潜望式跟瞄系统控制回路设计
基于永磁同步电机的潜望式粗跟踪转台伺服控制系统框图如图10所示。控制系统采用三闭环控制,控制回路由电流环、速度环和位置环组成。
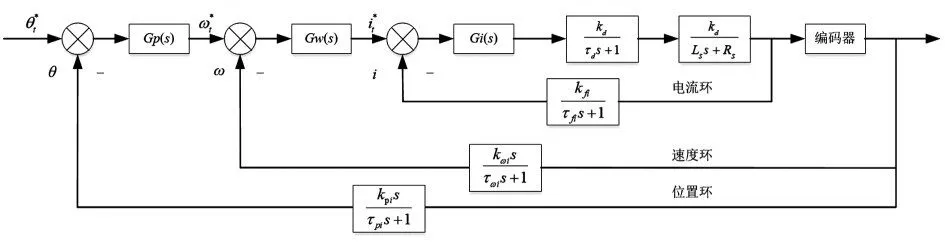
图10 潜望式跟瞄系统控制框图
三闭环回路均采用PI控制器,文中以位置回路为例完成回路设计。PI控制的传递函数可表示为:

位置环控制器的PI参数利用临界比例度法进行参数整定,经反复调试确实其参数为:kpp=28,Tpi=0.32。如图11所示为方位轴系位置环闭环频率特性曲线,从图中可知位置环带宽为21.3 Hz。

图11 方位轴系位置环闭环频率特性曲线
3 潜望式跟瞄系统跟踪模型建立
3.1 潜望式转台自动跟踪原理与坐标系建立
在对目标光束进行自动跟踪时,光束通过安装在方位轴和俯仰轴上的两块45°平面反射镜,进入到安装在方位轴下方的CCD相机中。光束进入CCD相机形成光斑,再利用图像处理板提取光斑的位置信息,然后将当前位置信息输送到伺服控制系统中,计算出当前光斑位置与目标指向位置的偏差,控制方位轴和俯仰轴进行转动完成指向,上述过程连续循环工作就实现了潜望式通信终端对目标光束的自动跟踪。而基于潜望式转台的自动跟踪算法所去阐述的就是提取出的光斑位置信息与两个轴系转动角度之间的关系。
为了更好的表示出光斑位置信息与轴系转动角度之间的关系,需要先建立两个坐标系。一是入射端口坐标系O-XYZ,二是基准坐标系O-X1Y1Z1。入射端口坐标系是以入射端口平面圆心位坐标原点,OZ轴垂直于端口平面向外,OX轴沿平面镜2圆心指向平面镜1圆心,OY轴则依据右手法则确定。基准坐标系是以CCD相机镜口的圆心为坐标原点,OX1轴指向CCD镜面圆心,OZ1轴指向平面镜2圆心,OY1轴则依据右手法则确定。如图12所示为潜望式跟踪转台的光路反射路径以及所建立的坐标系。

图12 光路反射路径及坐标系
如图13所示,在入射端口坐标系中目标光束可用矢量表示为:

式中,φ是光束LT与平面YOZ的夹角;θ是光束LT在平面YOZ投影与Z轴的夹角。目标光束经过两块平面反射镜后进入到CCD中,在基准坐标系下可表示为:

式中,(Y,Z)是在基准坐标系下目标光束于CCD相机焦平面形成的光斑位置坐标;f是CCD相机透镜的焦距。

图13 目标光束矢量表示
3.2 光束入射角度与脱靶量关系分析
当目标光束入射到跟踪转台中,会经过俯仰轴上的平面镜1、方位轴上的平面镜2反射进入到CCD相机靶面中。根据光束反射路径可以得到:


其中,TW是望远镜天线的作用矩阵;R2是平面反射镜2的反射矩阵;R1是平面反射镜1的反射矩阵。平面镜反射矩阵[14]可表示为:
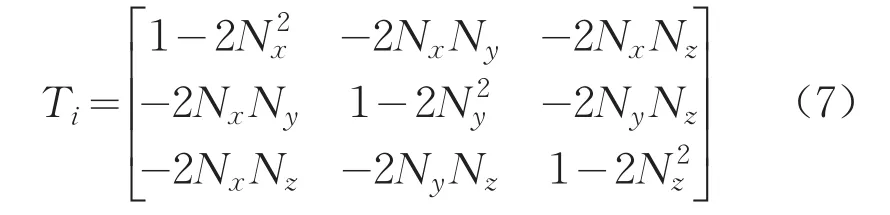
其中,Nx、Ny和Nz表示平面镜法线矢量N相对于入射端口坐标系的方向余弦。可得:
经计算可解出光束入射角度与脱靶量的关系为:

3.3 自动跟踪模型建立
潜望式跟瞄转台能够进行激光通信的基础是目标光束始终处于CCD相机的中心。为了实现这一目的需对目标光束进行实时的跟踪,其光跟踪的过程就是通过不断调节通信转台方位轴和俯仰轴的增量Δϕz和Δϕx使光斑保持在CCD中心位置的过程。
跟踪过程是建立在基准坐标系上的,而由于转台发生姿态变化,会使得基准坐标系发生位置偏移假设其绕X轴旋转角ϕx,因此转台的两转动轴的旋转矩阵为:

式(10)为方位轴旋转矩阵,式(11)俯仰轴旋转矩阵。
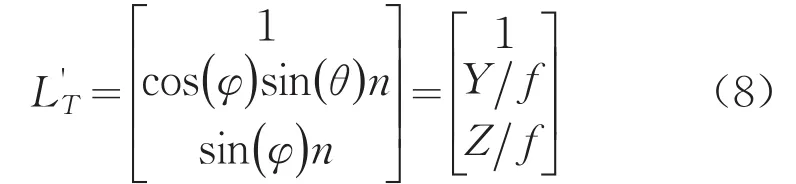
为了使目标光经过通信终端的光学元件后聚焦在CCD中心,通信终端姿态调整后使入射光在天线端口坐标下为[0,0,-1],即:

式(13),(14)即为潜望式跟踪转台进行光跟踪时的数学模型。其中ϕx、ϕz分别为方位轴转动角度和俯仰轴转动角度,均可由增量式光电编码器测得;φ、θ为目标光束在入射坐标系下的入射角度,可根据式(9)由脱靶量计算可得。
4 实验验证
根据上文中提到的空间矢量控制原理、硬件架构、软件系统以及自动跟踪算法,搭建潜望式跟踪转台伺服控制系统,并利用LABVIEW设计上位机软件,通过串口发送控制指令和数据采集。首先针对方位轴和俯仰轴的单轴电机进行伺服控制性能测试,然后在保证两个单轴电机控制性能的前提下,加入所设计自动跟踪模型,进行光跟踪性能测试。
4.1 单轴电机低速性能测试
为了验证基于ARM和FPGA控制器对转台的控制性能,以潜望式跟踪转台的方位轴为例,主要进行两个测试:一是速度环下的低速平稳测试;二是位置环下进行正弦引导的跟踪精度测试。如表1所示为方位轴电机参数。
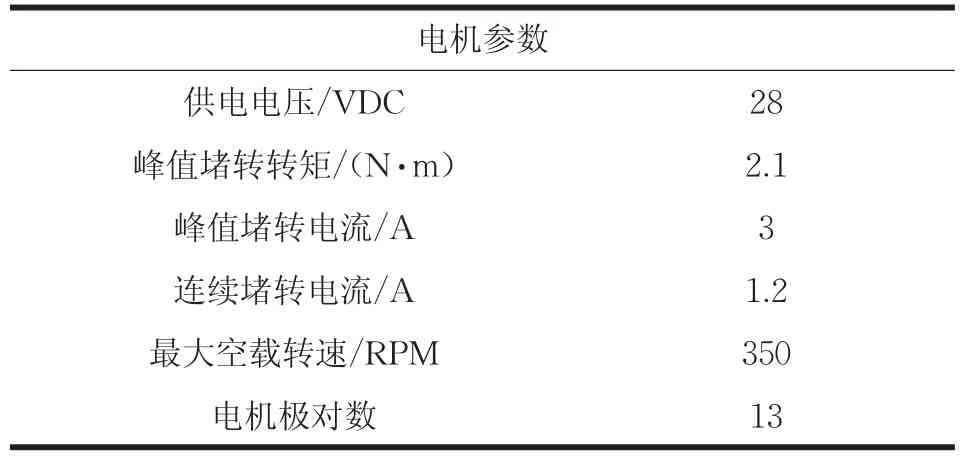
表1 方位轴电机
上文中已知位置反馈元件为162 000 00线的圆光栅,且其速度采样周期为1 ms,可计算得系统的速度分辨率为0.08('')/s。进行低速测试时,速度闭环周期为1 ms,速度目标值设定为5线/ms即0.4('')/ms。如图14所示为方位轴速度阶跃响应曲线,从图中可知速度阶跃响应调节时间为0.3 s,速度稳态误差为±1 线/s即为±0.08('')/ms。
在进行正弦引导测试时,位置环闭环周期为10 ms,正弦引导的最大速度为1°/s,最大加速度为1°/s2,故可得等效正弦曲线为:y=sint。如图15所示为正弦引导跟踪曲线,图16为跟踪误差曲线。其中,最大跟踪误差为18.4'',RMS值为8.600 1。
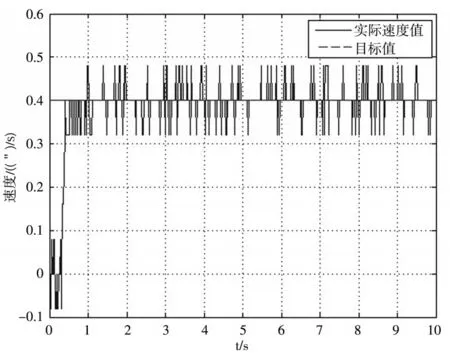
图14 0.4('')/ms的速度阶跃响应曲线

图15 最大速度为1°/s,最大加速度为1°/s2的等效正弦引导曲线

图16 最大速度为1°/s,最大加速度为1°/s2的等效正弦引导误差曲线
4.2 自动跟踪模型验证
为了验证所设计的自动跟踪模型的正确性,利用平行光管发射一束目标光束,潜望式跟踪转台对此光束进行跟踪。同是将跟踪转台置于摇摆台中,利用摇摆台模拟姿态运动进行动态跟踪测试,具体实验场景如图17所示。其中,如图18所示静态下光闭环最大跟踪误差为50 μrad;如图19所示在横滚方向频率为0.067 Hz,幅值为5°扰动下的光闭环最大跟踪误差为96 μrad。

图17 光跟踪试验场景
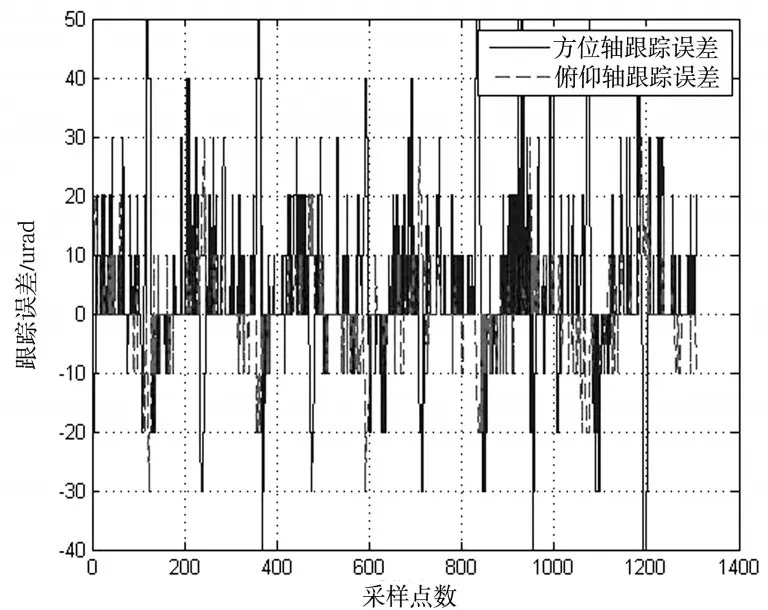
图18 光闭环跟踪误差曲线

图19 扰动下的光闭环跟踪误差曲线
5 结论
本文针对潜望式粗跟踪转台的高精度跟踪问题,首先设计基于ARM和FPGA的伺服控制器,以保证单轴电机的控制精度,然后根据潜望式跟踪转台的结构形式建立相应的自动跟踪模型,在设计硬件和跟踪算法的基础上,对潜望式跟踪转台进行低速平稳性测试以及光闭环跟踪测试。实验证明,所设计伺服控制器和控制回路具有良好的控制性能和自动跟踪模型的正确性。单轴电机以0.4()''/ms(5线/ms)运行时,速度波动为±0.08()''/ms即每闭环周期速度波动为±1线;在以最大速度为1°/s,最大加速度为1°/s2进行等效正弦引导时最大跟踪误差为18.4'',标准差为8.600 1;进行静态下光闭环最大跟踪误差为50 μrad,扰动下光闭环最大跟踪误差为96 μrad;本潜望式通信终端伺服控制系统能够满足对跟踪精度和低速平稳性的要求,并且根据建立的自动跟踪模型,能够实现对目标光束的精确跟踪,满足星间激光通信的高精度粗跟踪要求。
猜你喜欢
防爆电机(2022年3期)2022-06-17
阅读(科学探秘)(2022年5期)2022-06-07
幼儿园(2021年12期)2021-11-06
奥秘(2021年3期)2021-04-12
船舶标准化工程师(2019年4期)2019-07-24
中国修辞(2016年0期)2016-03-20
舰船科学技术(2016年1期)2016-02-27
火控雷达技术(2016年2期)2016-02-06
船海工程(2015年4期)2016-01-05
小学生时代·大嘴英语(2015年7期)2015-11-23
