基于单片机的机械臂电子系统设计分析
2020-01-07 18:53范贺
看世界·学术下半月 2020年9期
范贺
摘要:单片机的机械臂电子系统设计属于机电自动化设备,是计算机技术与信息技术的融合产物。本文分析了单片机的机械臂电子系统软件和硬件的设计方案,包括系统的编程语言、规划机械臂轨迹、远程控制装置、舵机系统装置、电源电路模块,并阐述了单片机的机械臂电子系统后期调试方式。
关键词:机械臂;单片机;电子系统
引言:单片机具有体积小、重量轻、造价低等优势,在发展中得到了广泛的应用,单片机的机械臂设计在工业生产、军事、探索海洋及宇宙等工作中發挥着积极作用,以单片机的机械臂应用代替人工操作,在工作中能有效的提高工作效率,在危险行业能有效的保障施工人员安全,有极高的应用研究价值。
一、单片机的机械臂电子系统软件设计方案
(一)设计编程语言
在单片机的机械臂电子系统软件设计方面,最重要的工作环节为设计编程语言,单片机的机械臂电子系统在应用中依托于计算机技术与信息技术,在编程语言选择方面目前C语言、汇编语言以及BASIC语言应用效果较为显著[1],各种编程语言在应用中不断摸索完善,提高与单片机的机械臂电子系统的适配能力。本文主要研究最广泛使用的C语言作为设计编程语言,其具有以下显著优势:首先,采用C语言进行编程能提供大量的数据类型及运算符号,能满足构建电子系统的各模块结构需求。其次,C语言的适用能力较强,在编程过程中可与其他编程语言合作使用。最后,C语言无需对内部寄存器和存储器进行考虑,极大的提高了编程效率。
(二)规划机械臂轨迹
在进行单片机的机械臂电子系统设计时,应结合机械臂的工作特点进行机械臂轨迹规划,机械臂在进行工作时具有重复性和复杂性,在进行机械臂轨迹策划时重点关注机械臂的运行稳定性,以确保其在进行工作时能按照规定轨迹进行工作操作,为实现这一目标,设计人员应合理策划机械臂的轨迹自由度,对机械臂运行时产生的波动进行预估计算,以规避机械臂关节转动增量突变现象。设计人员在组装机械臂时对其关节的转动范围设计时应基于不小于堵转10s这个数值,在完成机械臂的轨迹设计后,应进行关节的舵机通电情况和复位情况测试,确定其最佳复位位置以便于优化机械臂的运行平衡性。
二、单片机的机械臂电子系统各硬件设计
(一)电源电路模块设计
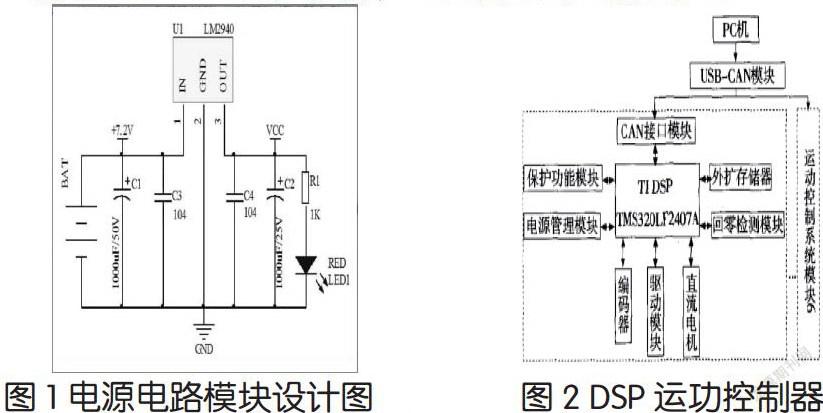
在电源电路模块设计中,举例由5个舵机采用+7.2V电池供电的机械臂电源电路设计,在单片机的机械臂设计中需要设计一个直流+5V稳压电路,以确保+7.2V电池电压进行稳压至+5V进行供电,在选择稳压电路芯片时,应选择低耗能、稳压电压差较小的稳压芯片,其中LM2940三端稳压芯片作为稳压电子元器件最为合适,在稳压器使用过程中随着干电池的电量减少、其内部电压也会随之降低,但由于电源的额定电压为+7.2V,LM2940稳压芯片符合最低使用电压大于5.5V的要求,在图1中C1和C2是两个电解电容,其作用是与LM2940构成典型稳压电路,C3和C4的作用是滤波,可防止LM2940自激振荡,以提高电源的稳定性。
(二)远程控制装置设计
远程控制装置是指单片机的机械臂操作在电源电路模块设计中,举例过程中可进行现场以外的工作人员通过电子控制系统对机械臂的运行工作进行调整,这种远程控制系统的诞生,能有效的便捷操作机械臂,增强了工作生产的安全性,远程控制装置主要是由传感器和控制器两部分构成的,在进行传感器设计时,设计人员应侧重于视觉传感和设计可穿戴的体感传感器,在进行控制器设计时,应选择DSP运动控制器,控制器是远程控制装置的核心内容,通过控制器操作人员可在远程进行编程算法的更改,从而改变机械臂各关节的运动轨迹,DSP运功控制器如图2所示,其中包括S曲线和T曲线等,运用IO处理功能的信号开关能及时的进行机械臂驱动和复位的远程控制。
(三)舵机系统装置设计
单片机的机械臂舵机系统装置主要包括无核心马达、电路板、齿轮、位置检测器等部件构成的驱动装置[2]。舵机系统装置的主要工作内容是指从单片机和接收机处接收工作信号,根据自身设定的基准信号进行机械臂的位置检测,以确保机械臂在工作使用中能准确到达规划设定位置,舵机的设定位置应安排在机械手臂腕、肘关节、肩关节、底座位置,通过整体的调动以确保舵机系统装置的效果正常发挥。就目前来看,在机械手臂控制系统设计中应用比较广泛的舵机为LF-20MG型号,其依靠直流电动机驱动,扭矩1.62N·m~1.96N·m、额定电压4.8V~6.6V,可以满足大部分应用场景对控制系统的需求。
三、单片机的机械臂电子系统后期调试
(一)代码检查
在进行单片机的机械臂使用之前,电子系统调试环节必不可少,设计者首先应进行编程代码的检查,严格检查工作中出现的各环节代码,在调试中及时发现代码存在问题并进行修正更改,为提高代码检查工作效率和工作准确性,设计人员可使用计算机辅助性代码检查工具进行工作,例如CodeCheck代码检查工具,该检查工具能基于CWE、SANS TOP 25、CERT等多种业界主流安全标准,针对Java、C、Python、TypeScript等多种语言的代码,进行静态检查和安全检查。设计人员可根据软件检查报告进行出现问题的代码精确定位,从而进行编程工作环节的优化。
(二)仿真调试
在完成编程代码的调试工作,设计人员应进一步进行仿真调试环节的检查,根据单片机的机械手臂使用与生产的需求制定针对性的工作仿真模拟环境进行机械臂工作运行试用,在工作过程中考察机械臂能否达成设计预期要求,进行机械臂仿真调试主要分为两种模式,一种是在线模式,创建实际环境进行系统的工作模拟,是比较常用的仿真调试方式,另一种是实时模式,在机械臂开展工作时通过电子系统记录机械臂的每一瞬间工作情况及数据,更具有精准性。设计者在进行仿真调试环节不可只使用单一的调试方法,单一的仿真调试方法将收集不全面、不客观的机械臂运行数据对后期的修改调整工作造成阻碍,将两种调试模式灵活结合运用,有利于全方位的得出系统设计运行效果,设计人员后期通过相关记录数据能进行科学有效地机械臂工作效果优化。
结语:综上所述,在进行单片机的机械臂电子系统设计时在软件与硬件设计并重,优化硬件设计的控制系统能有效的提高单片机的机械臂使用性能,在软件设计方面,增强软件系统的编程能力,提高规划机械臂轨迹的准确性,并在单片机的机械臂电子系统设计完成后做好调试工作,深入优化机械手臂的运作效果。
参考文献:
[1]庄艳.基于单片机的机械臂电子系统设计与实践[J].科学技术创新,2020(28):50-51.
[2]程金明.基于单片机的机械手臂控制系统设计[J].南方农机,2020,51(16):104-105.
猜你喜欢
科学与财富(2019年21期)2019-08-06
农机使用与维修(2016年12期)2017-01-17
安徽理工大学学报·自然科学版(2016年1期)2016-12-14
计算机教育(2016年7期)2016-11-10
现代电子技术(2015年17期)2015-09-23
中国机械(2014年23期)2014-10-21
电子世界(2004年4期)2004-07-26
电子世界(2004年4期)2004-07-26
电子世界(2004年5期)2004-07-26