
基于RBF神经网络增益调节的滑模制导律
2020-01-10 00:59佟廷帅刘晓利张志勇何贤军陈志华
兵器装备工程学报 2019年12期
佟廷帅,刘晓利,张志勇,何贤军,陈志华
(1.南京理工大学 瞬态物理重点实验室, 南京 210094;2.江苏自动化研究所, 江苏 连云港 222006)
随着导弹等飞行技术的发展,传统制导律已经不能满足现代日益复杂的反导拦截要求[1-2],新型导引律的研究和应用已成为导航领域的重点与热门方向。
变结构控制系统对外界干扰和参数摄动具有良好的鲁棒性[3],为解决导弹制导问题提供了新的方向[4-7]。但变结构制导律需要根据目标机动性大小来调节变结构项增益,增益过大会导致角速率抖振,不利于弹上机构的正常工作,同时制导精度下降[8];增益过小,则无法有效拦截目标。RBF神经网络结构简单,能够逼近任意非线性函数,且学习收敛速度快,具有实现复杂环境下实时控制的能力,可被用来调节变结构项的增益。
本文将变结构控制理论与RBF神经网络相结合,利用RBF神经网络来自适应调节变结构项的增益。同时考虑控制回路对系统的影响,主要是自动驾驶仪的影响。仿真结果表明:基于RBF神经网络增益调节的滑模制导律能有效削弱系统抖振,使脱靶量显著减小,对变结构控制理论在导弹拦截中的应用具有重要指导意义。
1 三维空间拦截模型
为方便讨论,首先建立三维空间拦截模型,如图1所示。M和VM为导弹及其速度;T和VT为目标及其速度;Oxyz为地面坐标系;Ox2y2z2为弹道坐标系;Ox4y4z4为视线坐标系;θM,φM,θT,φT分别为导弹和目标的弹道倾角和弹道偏角;qε,qβ分别为视线倾角和视线偏角。
图1 三维空间拦截模型示意图
1.1 导弹的运动模型
在研究导弹运动特性中,把导弹运动分为质心运动和绕质心转动。本文中,将导弹视为可操纵的质点,不考虑其绕质心的转动,从而得到简化后的导弹三自由度运动模型[9]:

(1)
式(1)中:gmx2,gmy2,gmz2为重力加速度在弹道坐标系上的分量;amx2,amy2,amz2为导弹机动加速度在弹道坐标系上的分量;xm,ym,zm为导弹在地面坐标系中的位置。目标的运动模型和导弹类似。
1.2 导弹-目标相对运动模型
选取某一时间段Δt起始时刻的视线坐标系作为制导过程中导弹-目标相对运动的参考坐标系。在Δt内,此参考坐标系随弹体平动。于是整个制导过程中的相对运动可以解耦成纵向平面和侧向平面内的运动[10]。
(2)

(3)

(4)
式(4)中:amy4(t),amz4(t),aty4(t),atz4(t)分别为导弹和目标机动加速度在Oy4和Oz4上的分量。
其中加速度指令由视线坐标系转化到弹道坐标系在的转换矩阵如下:
(5)
2 滑模变结构制导律
(6)
为了保证能够良好地趋近滑模面,选取对导弹控制系统的时变性具有自适应能力的趋近律,即:
(7)
趋近律的物理意义在于当R较大时,趋近速率会适当放缓,当R→0时,趋近速率会迅速增加,避免视线角速率过早发散。当s→0时,趋近速率约为ε,可以保证在有限时间内到达滑模面。
将式(6)代入式(7)可得:

(8)
(9)
把式(3)代入式(9),得到式(10):

(10)
由于目标机动加速度无法准确获得,可将其视为干扰量,可得:

(11)
(12)

(13)
同理,侧向平面的变结构制导律为:
(14)
3 基于RBF神经网络的变结构项增益调节
由式(13)、式(14)可知,滑模变结构制导律是由比例导引项和变结构项组成。在导弹拦截目标时,目标机动和滑模制导律的变结构项均与视线角速率成正比。只有选取合适的ε,才能补偿目标机动造成的视线角速率变化,否则会造成脱靶。
RBF神经网络具有并行计算、分布式存储、容错能力强、快速学习、对任意非线性函数都具有良好的逼近能力、满足复杂动态环境下非线性实时控制的特点。利用RBF神经网络来自适应调节变结构项的增益,可达到削弱抖振和提高制导精度的目的,基于RBF神经网络增益调节的滑模制导律拦截原理方框图如图2。将滑模面及其导数作为RBF神经网络输入,输出作为变结构项增益。

图2 基于RBFNN增益调节的滑模制导律拦截原理方框图
RBF神经网络的网络结构如下:
隐含层:隐含层中神经元的激活函数即径向基函数是对中心点径向对称且衰减的非负非线性函数。对输入信息进行空间映射的变换,这里激活函数取高斯函数:
(15)
式(15)中,ci和bi分别是隐含层第i个神经元的中心点和基宽度。||·||表示欧式范数。
输出层:对输入模式进行响应。输出层神经元的作用函数为线性函数,对隐含层神经元输出进行线性加权后输出,作为整个神经网络的输出结果。本文中神经网络输出为变结构项增益ε=|WTh(x)|,其中W为网络权值向量。
RBF神经网络学习算法如下:

输出层权重,隐含层单元中心及基宽度参数调整算法如下:
(16)
式中η∈(0,1)为学习速率。
4 仿真结果及分析
为了验证基于RBF神经网络增益调节的滑模制导律的有效性,利用Matlab进行仿真。初始仿真参数见表1。
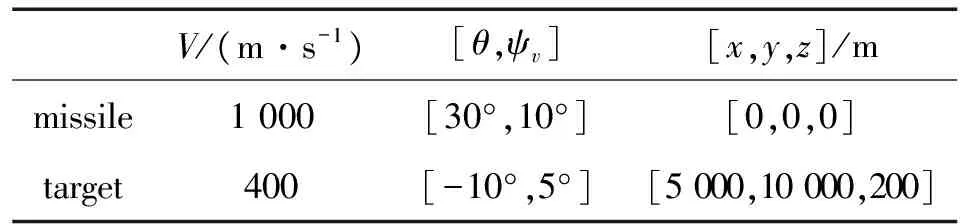
表1 导弹-目标的初始仿真参数


图3 aty2=-7g时导弹-目标运动轨迹

图4 aty2=2g时导弹-目标运动轨迹

图5 aty2=-7g时的视线角速率变化

图6 aty2=2g时的视线角速率变化
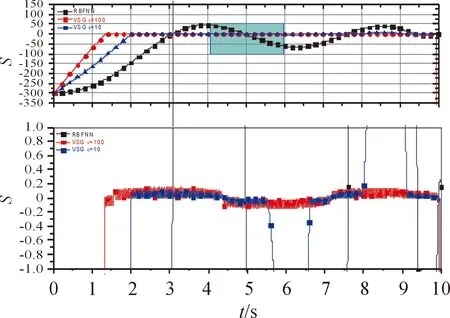
图7 aty2=-7g时S的变化
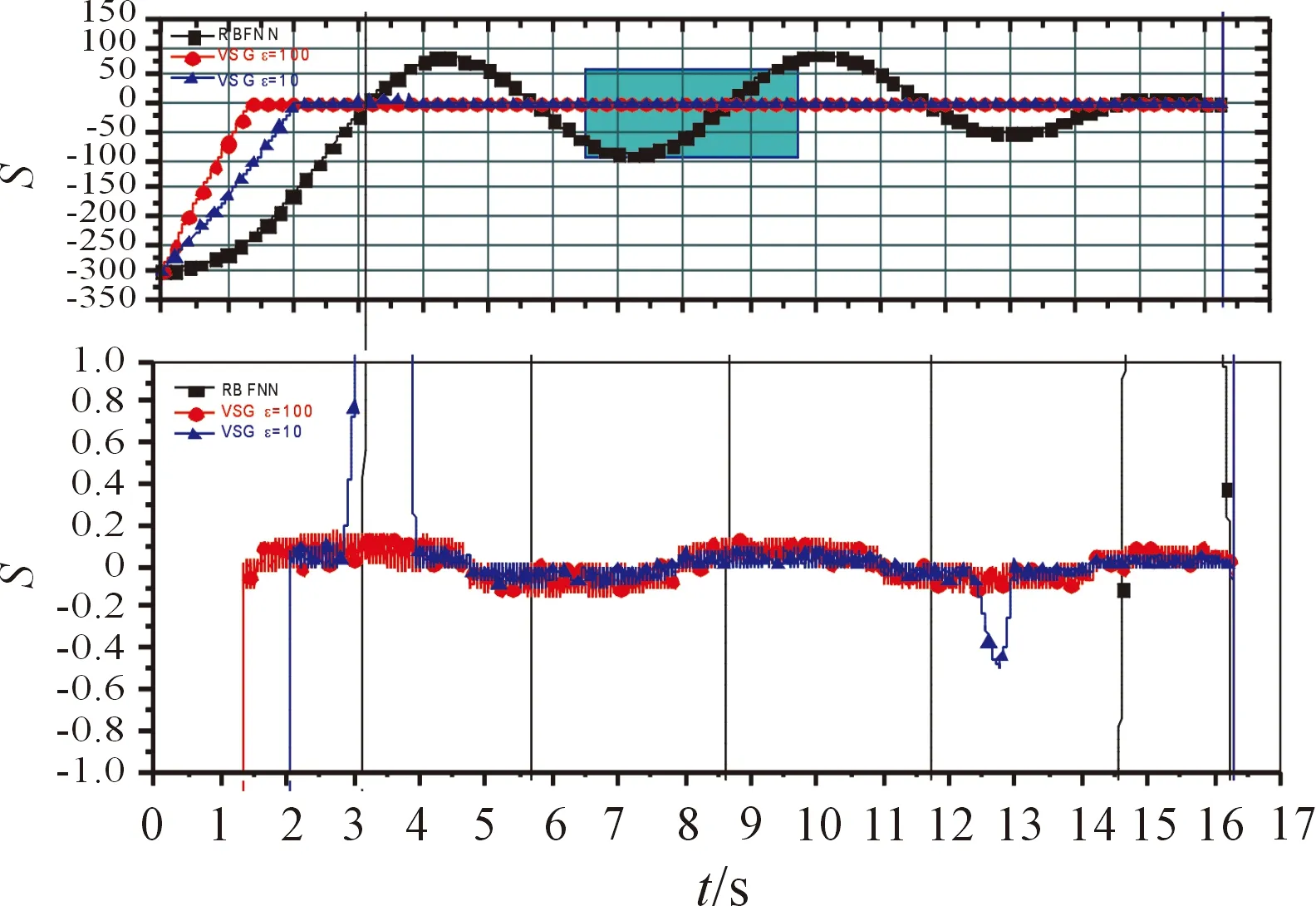
图8 aty2=2g时S的变化
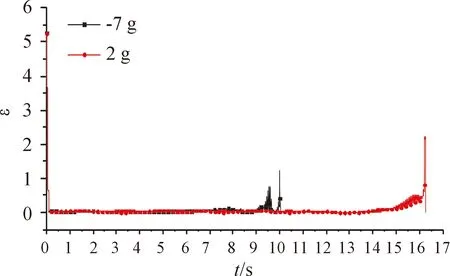
图9 aty2=-7g;2g时ε的变化

5 结论
1) 针对传统导引法无法有效拦截高速、大机动目标以及忽略自动驾驶仪动态特性等问题,结合变结构控制理论和神经网络,提出基于RBF神经网络增益调节的滑模制导律,利用RBF神经网络自适应调节变结构项增益。
2) 与比例导引法和固定增益滑模制导律相比,基于RBF神经网络增益调节的滑模制导律脱靶量有显著减小;同时,与固定增益滑模制导律相比,基于RBF神经网络增益调节的滑模制导律能有效削弱系统的抖振,对于目标的机动具有较强的鲁棒性。
猜你喜欢
心理学报(2022年10期)2022-10-12
舰船科学技术(2022年10期)2022-06-17
北京航空航天大学学报(2022年5期)2022-06-06
大电机技术(2022年2期)2022-06-05
科学技术创新(2021年35期)2022-01-14
北京航空航天大学学报(2021年4期)2021-11-24
建材发展导向(2021年14期)2021-08-23
湖北大学学报(自然科学版)(2021年5期)2021-08-20
北京航空航天大学学报(2021年6期)2021-07-20
北京航空航天大学学报(2021年6期)2021-07-20
