基于HOG-SVM的GIS设备智能拆装机器人系统研究
2020-01-10 13:50周腊吾李斐然李俊民
浙江电力 2019年12期
钱 平,周腊吾,李斐然,李俊民
(1.国网浙江省电力有限公司,杭州 310007;2.长沙理工大学电气与信息工程学院,长沙 410114;3.国网浙江省电力有限公司电力科学研究院,杭州 310014;4.湖南长高电气有限公司,长沙 410600)
0 引言
相比于传统敞开式高压设备,GIS(气体绝缘金属封闭开关)因其具有构造紧凑、占地面积小、检修周期长、运行可靠性高、装置整体重量轻、接地性良好等优点[1],自60年代问世以来,逐渐成为变电站中的重要设备,在电力系统中有着至关重要的地位[2]。但目前,在GIS设备安装和检修过程中仍存在运行维护水平和检修效率较低的问题[3],突出体现在:
(1)拆装作业可行性低[4]。现有GIS变电站配电室大多不配备电动运输车,仅在房顶预安装悬挂环,而且部分GIS安装在室内,无法使用起重机进行操作。房顶的悬挂环在使用时不能移动位置,且起重机安装在房顶限制了大多数使用场景,降低了它的适用性。
(2)拆装作业安全性低。在拆装作业过程中采用脚手架或者抱杆时,脚手架可能过于单薄导致难以承重,抱杆的支撑点选择不好会影响设备起吊过程中的平衡。GIS的气室易发生晃动[5],难以保证其安全。临时运行设备缺乏日常的专业安全检测和监控,无法保证设备的可靠性。
(3)拆装作业的方式会影响GIS拆装工艺[6]。当GIS的气室进行接触时,需要起吊设备对方位实现精准调整,起吊过程中产生的微小晃动都会影响气室接触的精准性和可靠性。GIS中气室接触面错位会导致法兰密封面产生摩擦或碰撞,密封橡胶圈变形或移位,拆卸和组装时接触面内应力不均匀,造成质量隐患和强度过大的风险[7]。
(4)人员劳动强度大(比如装配固定等),在一定程度上束缚人员工作效率,存在产出比不经济等问题。
随着移动机器人技术与自动化技术的发展[8],机器人已开始逐渐应用到变电站中,但目前大部分研究和应用都面向变电站的巡检[9-11],针对变电站GIS设备智能拆装机器人系统的研究和应用国内还处于空白阶段。本文在实地考察平高、泰开、西开等多个变电站的基础上,分析了GIS安装作业过程[12],将机器人技术与GIS设备的拆装问题相结合,为GIS设备维护与检修提供了一种新的思路——GIS设备智能拆装机器人系统。针对GIS设备智能拆装机器人系统中机构检测对接的难题,本文在视觉定位的基础上,采用基于HOG(梯度方向直方图)特征提取和SVM(支持向量机)线性分类器的分支母线位置判别对接方法,实现了GIS分支母线与机构的智能对接。
1 GIS设备智能拆装机器人系统结构
GIS设备智能拆装机器人系统主要由履带车、夹具、智能机器人三部分组成,如图1所示。

图1 GIS设备智能拆装机器人系统模型
(1)履带车:具有接地面积大、接地比压小、附着性能好、爬坡能力强、转弯半径小、跨沟越埂能力强等特点[13],兼具行走和搬运2种功能。
(2)夹具:安装于多轴机器人的末端关节处,实现对GIS工件的柔和、稳定抓取。
(3)智能机器人:由机器人及控制系统组成,拆卸时负责对分支母线的空间位置实现精确控制。机器人安装在履带运输车上,是GIS设备智能拆装系统的核心部件。
2 对接机构的智能检测
2.1 分支母线对接任务分析
当人工操作机械臂夹取分支母线移动至目标分支母线附近时,开始进入智能对接模式阶段。如图2所示,该过程主要分为四个阶段:进入图像捕获区阶段、中心对准阶段、平面对齐阶段和标识螺孔对齐阶段。
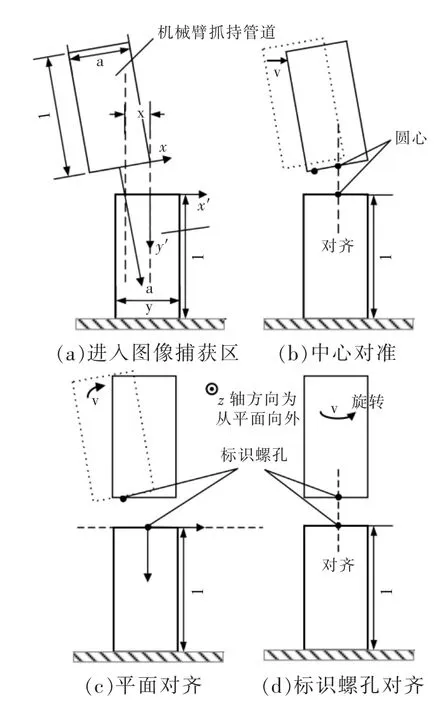
图2 分支母线对接过程
(1)进入图像捕获区阶段:操作员操作机器人将分支母线移动至目标分支母线附近,目标分支母线即进入图像捕获区域内。
(2)中心对准阶段:工业相机将对接面图像发送至计算机,计算机将控制信号传送给控制柜,移动分支母线使抓持的分支母线轴心与对接面圆心对齐。
(3)平面对齐阶段:工业相机继续拍摄对接面图像并将其发送至计算机,将操作控制信号传送给控制柜,继续移动分支母线,完成平面对齐。
(4)标识螺孔对齐阶段:通过(2),(3)类似的步骤获取视觉图像,对抓持分支母线进行旋转操作使标识螺孔一一对齐,之后控制机械手沿纵向(y方向)移动完成对接。
2.2 分支母线的位置判别与对接方法
基于视觉定位的基本方法,融合HOG和SVM的对接面分支母线的位置判别与对接方法,实现GIS分支母线的对接,其流程图如图3所示。总体分为3个模块:像素识别模块、图像计算模块和对齐控制模块,像素识别模块为图像计算模块提供计算数据,图像计算模块向机柜控制模块提供操作信号。

图3 基于HOG和SVM的GIS视觉对接流程
2.2.1 图像获取
通过工业相机获取目标对接面图像资料,3个摄像头应对称分布。
2.2.2 图像处理
通过开运算、灰度化及二值化的图像后处理方法,有效减少目标图像中与分支母线颜色接近部件的干扰,达到对分支母线进行准确定位的目的。
(1)图像开运算处理:将A集合和B集合腐蚀运算后的结果与B集合膨胀运算。

(2)图像灰度化处理:为得到可二值化处理的图像数据格式,须通过图像灰度化处理对目标图像进行降维。
(3)图像二值化处理:采用不同的阈值范围,就能获得只含有目标分支母线像素的图像,至此图像后处理完毕。
2.2.3 HOG特征值提取
HOG是梯度方向直方图特征,通过将图像划分成小的Cell,在每个Cell内部进行梯度方向统计得到直方图描述[14]。HOG特征提取流程如图4所示,其基本要点为:
对HOG特征进行提取时,为减小由物体表面光学效应导致的特征变化,须压缩图像颜色,空间归一化处理目标图像[15]。因为颜色状态对HOG特征的影响很小,为增加目标图像灰度处理后边界区的区分度,通常使用γ校正的方法[16]。

式中:f为数字图像;f1(x,y)为点(x,y)在目标图像γ校正前的灰度值;f(x,y)为点(x,y)在目标图像γ校正后的灰度值;通常γ值越大代表图像的灰度级越高。
将目标图像分别与[-1,0,1]和[1,0,-1]T算子进行卷积运算,则图像中每个像素点位置的梯度幅值M(x,y)和梯度方向θ(x,y)分别为:

式中:Gx和Gz分别为x和z方向上的梯度值。
将每个Cell单元的梯度直方图进行权重投影,最后将所有单元直方图向量组合起来就构成了图像的HOG特征。
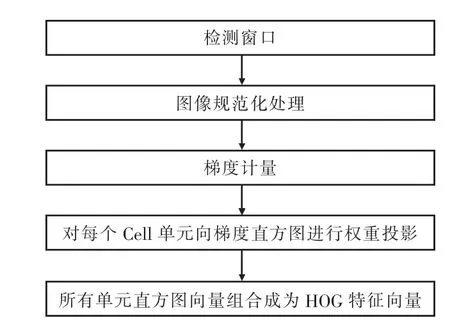
图4 HOG特征提取方法
2.2.4 SVM分类
SVM线性分类器,通过调整线性分类函数阈值的大小来确定样本所属类别,将样本中的数据分成两类[17]。线性分类器的作用是通过在n维空间中寻找一个超平面来划分两类需要分割的部分,从而实现对特定目标的分类。
假设N个训练数据的坐标信息构成数据集E:

数据集E可被一超平面分开,能将超平面表示为:

式中:ω为权向量;b为超平面偏值;x为需要分类的特征。
如果分类函数为f(x)=ωTx+b,如图5所示。当点x位于超平面上时,f(x)=0;而当点x位于轴y=1上时,f(x)>0;当点x位于轴y=-1上时,f(x)<0。
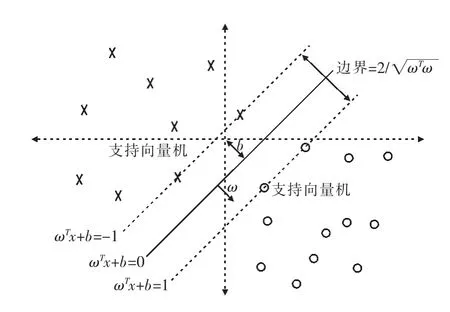
图5 SVM示意图
平面上任意一个数据点到超平面的距离D可表示为:

令该超平面满足:

则所求向量ω和b可以表达为:

即可求得分类器函数f(x)。
2.2.5 重心计算
在进行重心计算前首先需对图像中的像素进行目标识别,像素的准确识别需使用准确的分类器,需利用大量样本训练进行提高,图6为基于HOG和SVM的目标识别方法流程。
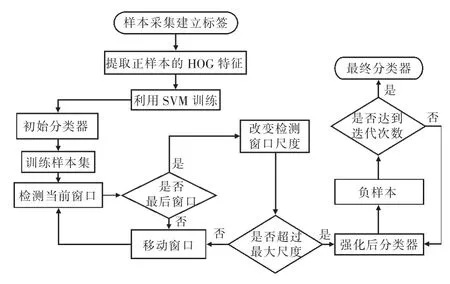
图6 HOG和SVM的目标识别方法流程
以图案中对接面法兰边缘的螺孔作为像素识别目标,对目标像素集合进行二值图重心计算,即可到对接面中心相对于GIS工件工业相机所在截面中心的位置参数,可据此进行中心对齐。
2.2.6 平面对齐
由于工业相机并非正对对接面,获得的图像存在几何失真,螺孔呈椭圆形分布。当中心对准完成后,对接面平面与GIS工件工业相机所在截面很可能并不平行,此时3个相机获得的图像失真变形参数存在差异,根据几何逆变函数进行平面对准,直至3个工业相机获得图像的几何失真程度一致。
2.2.7 标志螺孔对齐
为确保对接面螺孔与GIS工件的螺孔一一对齐,需在对接面目标螺孔上设置标识物,通过转动GIS工件实现螺孔对齐。
3 GIS智能检测对接技术的应用
本文所提出的基于HOG和SVM的智能对接检测技术在工程实际中得到了很好的应用,工业相机用于捕获现场分支母线的位置信息,如图7所示。
取对接过程中经工业相机捕获回来的一幅原始图像分析,如图8所示。
为消除干扰部分的影响,准确找到目标分支母线的位置及方位,要对截取出来的目标图片进行开运算、灰度化及二值化的图像处理,如图9所示。

图7 智能检测对接技术的实际应用

图8 工业相机捕获的原始图像

图9 开运算、灰度化及二值化处理后的图像
由于对接过程图像较暗导致对接法兰孔与其他部分区分不明显,可以使用γ校正的方法处理,在降低了图像的亮度、减少了暗区的对比度的同时增加了亮区的对比度,从而突出分支母线根部待对接法兰孔以便后续处理,γ校正处理后的对接图像如图10所示。
在对图像HOG特征做统计分析之前必须对图像进行分割,把图像分成若干个特定的、具有独特性质的区域。通过图像分割可以提取出分支母线根部待对接法兰孔,处理后的对接图像如图11所示。然后经过SVM线性分类器对图像进行特定目标的分类后,图像采集卡把处理后的图片传送给控制系统,控制系统分析图片信息后,将控制信号传送给机器人控制柜,机器人控制柜控制机器人执行对接命令。

图10 γ校正处理后的图像
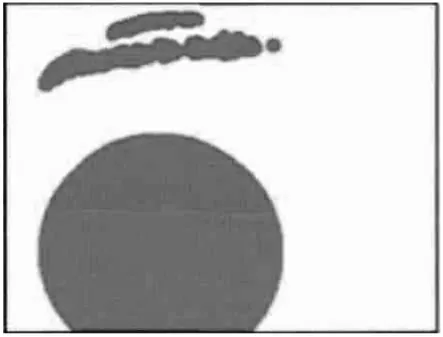
图11 图像分割处理后的图像
GIS设备智能拆装机器人移动分支母线,使抓持的分支母线轴心与对接面圆心对齐,如图12所示。

图12 中心对准图
GIS设备智能拆装机器人抓持分支母线继续移动,完成平面对齐,如图13所示。
GIS设备智能拆装机器人抓持分支母线进行旋转操作使标识螺孔一一对齐,如图14所示。
采用本文所提出的基于HOG和SVM的智能对接检测技术后,GIS设备智能拆装机器人系统成功实现了GIS设备的检测与对接。

图13 平面对齐图

图14 标识螺孔对齐图
4 结论
本文在充分调研多个变电站GIS设备工作环境后,提出了GIS设备智能拆装机器人系统,整个拆装系统由履带车、夹具及智能机器人组成。针对GIS设备智能辅助拆装系统中机构检测对接的难题,本文在工业相机获取目标对接面图像资料预处理后,提取目标图像的HOG特征,采用SVM线性分类器对目标图像的像素点行准确识别。通过对目标像素集合的重心计算、图像失真参数的对比分析及标识螺孔的对齐实现了GIS分支母线与机构的智能对接。
猜你喜欢
黑龙江大学自然科学学报(2022年1期)2022-03-29
计算机应用与软件(2022年2期)2022-02-19
计算机系统应用(2021年10期)2022-01-06
上海理工大学学报(2021年6期)2021-12-29
中北大学学报(自然科学版)(2021年5期)2021-11-15
计算机系统应用(2021年2期)2021-02-23
电子技术与软件工程(2019年18期)2019-11-18
学生天地(2019年28期)2019-08-25
电子技术与软件工程(2017年14期)2017-09-08
航天返回与遥感(2014年5期)2014-07-31