空间带网展开动力学与仿真
2020-02-04 01:57林子轩庞兆君杜忠华司骥跃
科学技术与工程 2020年36期
林子轩, 庞兆君, 杜忠华, 司骥跃, 付 杰
(南京理工大学机械工程学院, 南京 210094)
近年来,人类的空间活动日渐频繁,伴随着每一次的空间活动,空间碎片的数量都在不断增加。空间碎片对航天器和航天员产生了重大的安全隐患。空间绳网因其结构简单可靠,易于实现;降低了对姿态及轨道控制的要求;增加了在轨捕获距离,降低了碰撞概率;根据目标探测系统可迅速接近捕获目标;可实现小型模块化,易于存储。这些优点已然成为研究热点[1]。自Nakasuk等在Furoshiki项目中提出空间绳网思路后,中外学者对其进行了大量研究。
Gärdsback等[2]对绳网的折叠方式和构型进行研究。Williams等[3-5]利用集中质量模型和黏性弹簧结构来完成柔性绳索动力学建模。陈钦等[6]建立了绳网发射动力学方程,并进行了地面试验。于洋等[7]建立了正方形绳网展开过程解析模型。李京阳等[8]比较了折叠方式对绳网展开性能参数的影响。贾杰等[9]将绳网简化为X模型,采用六根弹簧模拟绳网进行展开参数分析。张青斌等[10]采用弹簧质点法仿真绳网展开,通过地面试验对模型进行了验证,并提出地面与太空环境差异对比。刘海涛等[11]研究了轨道、捕获方向和抛射参数对展开性能的影响。张瑞雄[12]采用绝对节点坐标法进行空间绳网目标拖曳研究。张江[13]在对空间绳网捕获过程的动力学研究时,建立了绳网与目标的碰撞动力学模型,实现了绳网碰撞过程的动力学仿真分析。
绳网理论已经相对成熟,但是绳网抓捕目前面临两个问题,其一空间绳网较为柔软,极易出现变形、松弛与缠绕。其次针对抓捕目标小、相对速度快的目标时,空间绳网存在断裂的问题。使用强度更高、缠绕较少的空间网带替代传统绳网,并对其动力学模型进行研究。不同于空间绳网的抗拉不抗压特性,空间带网具有一定的抗弯抗扭刚度,在一定程度上避免了带与带之间的相互缠绕,并且空间带网强度、有效抓捕面积高于空间绳网,在小以及快的抓捕目标应用中有更高的容错率。
空间带网虽然在功能上与空间绳网相同,但因其具有抗弯及抗压强度,在结构上与布料、薄膜结构更为相似。许多学者对布料的动力学模型开展了研究。赵舒羽[14]以质点-弹簧模型为基础提出改进的质点-弹簧-三角形网格模型。并进行了布料撕裂模拟。沙莎[15]将布料厚度考虑在内,在传统的弹簧-质点模型基础上,建立了长方体弹簧-质点模型,模拟出花色组织受到纱线张力作用下所产生的线圈形态变化。张莹莹[16]采用绝对节点坐标法在三维薄板单元基础上建立薄膜单元,并推导了质量阵、刚性阵及弹性阵。给出了在冲击作用下的振动特性。综上,可以使用弹簧质点法对网带进行建模。
现提出一种带网抓捕系统,采用弹簧-质点法建立带网动力学模型,并通过MATLAB程序进行带网自由悬垂模拟,与ABAQUS相比较验证该模型准确性。重点进行带网抛射展开及旋转展开数值仿真,旨在对比得出更适合于带网的展开方式。
1 空间带网展开动力学模型
1.1 空间带网捕获系统
如图1所示,空间带网展开动力学模型由牵引质量块和带网组成,带网为正方形带网,牵引质量块位于带网的四个角点。发射时牵引质量块获得初始速度,带动带网飞行展开。与目标碰撞后进行收缩抓捕,最后将目标拖曳至轨道。
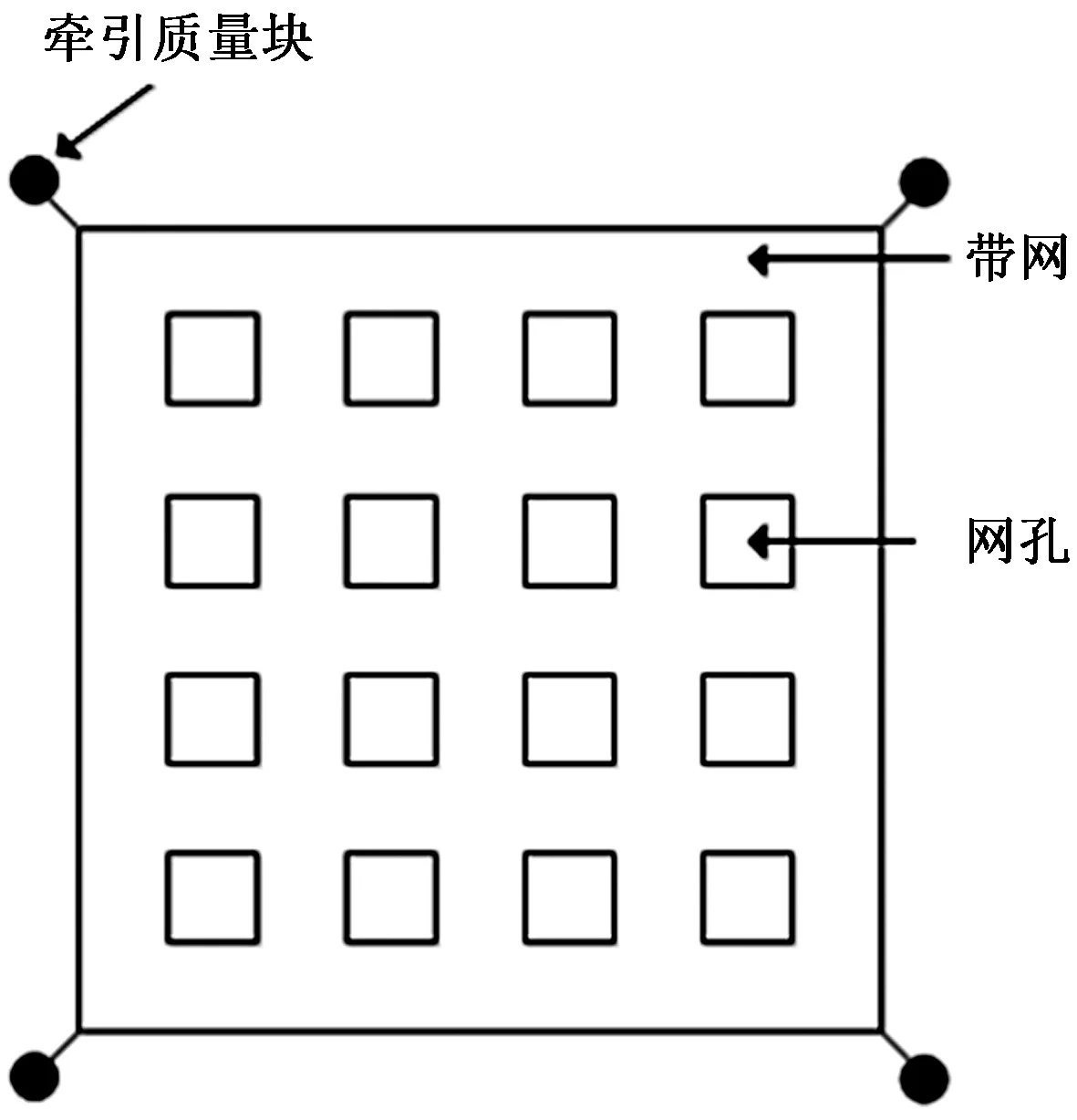
图1 带网简化模型Fig.1 Simplified model with network

图2 多种类弹簧-质点模型Fig.2 Multispring-particle model
1.2 多弹簧的弹簧-质点动力学模型
Provot[17]建立了经典的弹簧质点模型。模型将布料分为若干网格单元,如图2所示。将布料质量均匀分布到各个质点上,各个质点之间通过无质量的弹簧相连接。模型中存在三种类型的弹簧:
(1)左右相邻的质点[i,j]和[i+1,j]以及上下相邻的质点[i,j]和[i,j+1]之间的为结构弹簧,用来模拟布料横纵向的力,阻止布料在横纵向过度拉伸形变。
(2)对角线相邻的质点[i,j]和[i+1,j+1]之间的为剪切弹簧,用来防止织物在自身平面过度和不真实的变形,而给织物的一个剪切刚性。
(3)横向间隔点[i,j]和[i,j+2]以及纵向间隔点[i,j]和[i+2,j]之间的为弯曲弹簧,用来模拟布料在被弯曲和折叠时,抵抗弯曲的力。
在弹簧质点模型中,任意质点[i,j]在t时刻的位置是Pi,j(t),力学方程由其在当前位置受到的合力Fi,j(t)决定。根据牛顿第二定律
Fi,j(t)=m(Pi,j)a(Pi,j)
(1)
式(1)中:m(Pi,j)为该质点的质量;a(Pi,j)为该质点在t时刻的加速度;Fi,j(t)为该质点所受到的合力,由内力和外力组成:
Fi,j(t)=Fint(Pi,j)+Fext(Pi,j)
(2)
式(2)中:内力Fint(Pi,j)由内部三种弹簧变形力叠加产生:
Fint(Pi,j)=Fstr(i,j)+Fshear(i,j)+Fbend(i,j)
(3)
式(3)中:Fstr(i,j)、Fshear(i,j)、Fbend(i,j)分别为该质点所受拉力、剪切力和弯曲力。
如图3所示,质点[i,j]与通过结构弹簧、剪切弹簧、弯曲弹簧相连质点间距离分别为rstr、rshear、rbend。

图3 质点[i,j]所受弹力Fig.3 Elasticity of particle [i,j]
由于带网拉伸强度与压缩强度相差较大,在拉伸及压缩时采用不同的劲度系数k1、k2,劲度系数大小由弹簧的材质决定。根据胡克定律,在非过度拉伸的情况下,弹簧的应力与弹簧形变量呈线性关系,表达式为
(4)
式(4)中:x1为弹簧运动时的长度;x0为弹簧原长。
进行地面试验仿真时,质点还会受到外部作用力的影响,如重力、阻尼力等,即
Fext(Pi,j)=Fg+Fdamp
(5)
式(5)中:重力Fg=m(Pi,j)g,外力中附加阻尼力Fdamp可以增加系统的稳定性。阻尼表现了运动过程中带网的硬度,并且可以防止仿真过程中很大的平面振动。
Fdamp=-cvij
(6)
式(6)中:c为阻尼系数;vij为质点速度矢量。
为了防止布料在经纬两个方向产生过大的形变,结构弹簧需要很大的弹性系数。剪切弹簧可以模拟布料在内倾斜方向的作用力,也需要较大的弹性系数。而弯曲弹簧连接了间隔点,用于抵抗布料的面外弯曲,其弹性系数较小。
2 空间带网动力学仿真
2.1 空间带网自由悬垂仿真
2.1.1 基于弹簧-质点法
采用上述提及的空间带网模型,使用MATLAB进行空间带网自由悬垂仿真。固定带网中心点,网体在重力作用下,自由下落,网形逐渐收成一束。如图4所示,为空间带网自由悬垂过程仿真图。
设置带网中心点六个自由度完全固定,在重力作用下自由悬垂。带网结构参数如表1所示。

图4 基于弹簧-质点法的带网自由悬垂仿真图Fig.4 Simulation diagram of net free suspension based on spring-particle method
图5所示为弹簧-质点模型下空间带网的自由悬垂展开面积与时间关系图。由图5可知,带网从平铺状态开始下落,展开率为100%,经过约4.1 s后带网四角点相遇,展开率减小至0。

表1 带网结构参数Table 1 Parameters of band net structure

图5 自由悬垂带网展开面积与时间关系图Fig.5 Relation between the expanded area and time of free overhanging belt net
2.1.2 ABAQUS仿真对比
在ABAQUS中采用膜单元建立相应带网模型。固定带网中心点。带网在重力作用下进行自由悬垂运动。采用ABAQUS的带网自由悬垂过程仿真如图6所示。
在相同初始参数设置、相同工况下,ABAQUS仿真与MATLAB编程仿真对比结果如图7所示。

图6 ABAQUS带网自由悬垂仿真图Fig.6 Simulation diagram of ABAQUS with net free suspension

图7 ABAQUS与编程仿真对比图Fig.7 Comparison between ABAQUS and programming simulation
图7(a)截取带网自由悬垂过程中0、1、2、3 s带网悬垂情况,通过对比可知两者仿真姿态相似。图7(b)为弹簧-质点模型与ABAQUS仿真带网展开面积与时间关系对比图。弹簧-质点模型仿真结果与ABAQUS仿真结果前期基本吻合,收尾阶段稍有细微差别,该差别存在于带网中心点位置未能完全重合,以及弹簧弹性系数上的细微差别。
通过ABAQUS验证可知,上文提及的弹簧-质点模型可以较为准确地描述空间带网的运动过程。
2.2 剪切弹簧与弯曲弹簧参数对模型的影响
弹簧-质点模型多用于绳网的建模,传统的弹簧质量模型将绳段简化为质点及质点间无质量的弹簧阻尼器。采用三种弹簧的弹簧-质点模型对带网进行仿真,设计带网抛射展开仿真讨论剪切弹簧与弯曲弹簧对模型的影响。
带网初始转载于发射装置内,仿真中简化为按缩小系数s=0.05将带网整体缩小为完全展开的5%。牵引质量块向上抛射展开,在牵引质量块的作用下,带网逐渐展开成型,最终完全展开。
仿真4种工况,分别为:无剪切弹簧、无弯曲弹簧、既无剪切也无弯曲弹簧以及正常情况。仿真结果如图8所示。
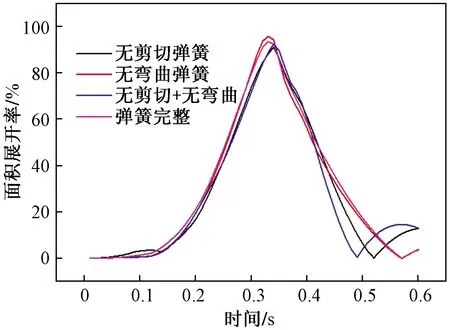
图8 剪切弹簧与弯曲弹簧对模型影响Fig.8 Influence of shear spring and bending spring on the model
由图8可知,剪切弹簧对模型影响较大。无剪切弹簧与正常情况对比,最大展开面积小,保形时间短,曲线粗糙。弯曲弹簧对模型影响较小。
2.3 空间带网与空间绳网抛射展开对比
在针对速度较快的空间碎片时,绳网容易出现断裂现象,采用强度更高的带网替代绳网进行抓捕任务。为了验证带网抛射性能,设计如下对比仿真。
发射参数:发射速度10 m/s、发射角度30°、每个质量块与网质量比均为1/6。
材料参数:弹性模量E=2.83×109,密度1 140 kg/m3。
结构参数:边长2 m正方形。带网有4个网孔,绳网用2条绳对比1条带,有8个网孔。带网厚度0.25 mm,质量0.9 kg;绳网网绳直径1 mm,质量0.3 kg。
弹性系数:均采用公式k=EA/L计算得出。
阻尼系数:均采用相同公式计算得出。
仿真初始条件如上文所述。结果如图9所示。

图9 带网与绳网抛射展开对比Fig.9 Comparison of belt net and rope net projectiles
由图9可知,展开阶段两者走势相似,整体曲线带网较绳网更平滑。绳网最大展开面积略大于带网,差别可忽略不计。两者保形时间接近。
综上所述,发射参数相同时,在采用带网替代绳网以提高抓捕强度的基础上,在抓捕性能方面,带网与绳网相近,满足空间碎片抓捕任务。
2.4 空间带网抛射展开仿真与旋转展开仿真对比
自空间绳网概念提出以来,多是以牵引体四散带动绳网进行抛射展开。日本于2010年成功发射并在轨展开了IKAROS 太阳帆,采用自旋动力实现膜面展开[18]。国防科技大学刘海涛团队进行了绳网旋转展开试验[19]。空间带网作为空间绳网,空间可展开薄膜结构相似而非完全相同的结构,将对其抛射展开与旋转展开进行仿真对比,寻求更合适的展开方式。
经对比仿真验证上述弹簧-质点模型在带网仿真的可行性后,采用MATLAB进行带网抛射展开仿真。图10所示为空间带网抛射展开过程仿真图。
带网模型采用4 m×4 m大小正方形带网。在带网抛射展开试验中,带网由4个角点连接牵引体,牵引体由发射装置发射,带动带网飞行展开。仿真中将质量块等效为质点。发射参数如表2所示(发射角度为质量块发射方向与装置中轴线夹角)。
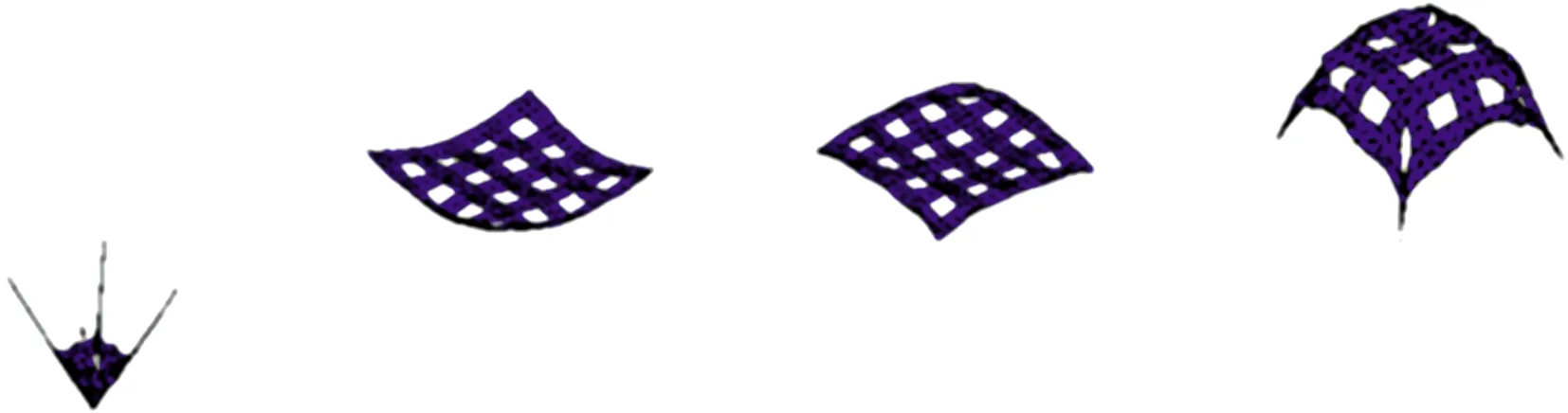
图10 空间带网抛射展开过程仿真图Fig.10 Simulation diagram of spatial network projection expansion process
质量块速度方向分别为F1、F2、F3、F4。在x、y方向分解为如图11所示方向。
图12所示为带网展开面积与时间位移关系图,因为带网平铺时自身存在褶皱,不能达到100%展开,因此零时刻展开率从0开始,在0.33 s后带网展开达到最大值,展开率为93%,展开保形时间为0.06 s(计算展开率在80%以上时间)。
改变初始条件进行带网的旋转展开仿真,旋转发射参数如表3所示。
旋转发射质量块速度方向如图13所示,质量块速度方向分别为F1、F2、F3、F4。质量块带动空间带网呈顺时针旋转展开。

表2 抛射展开发射参数
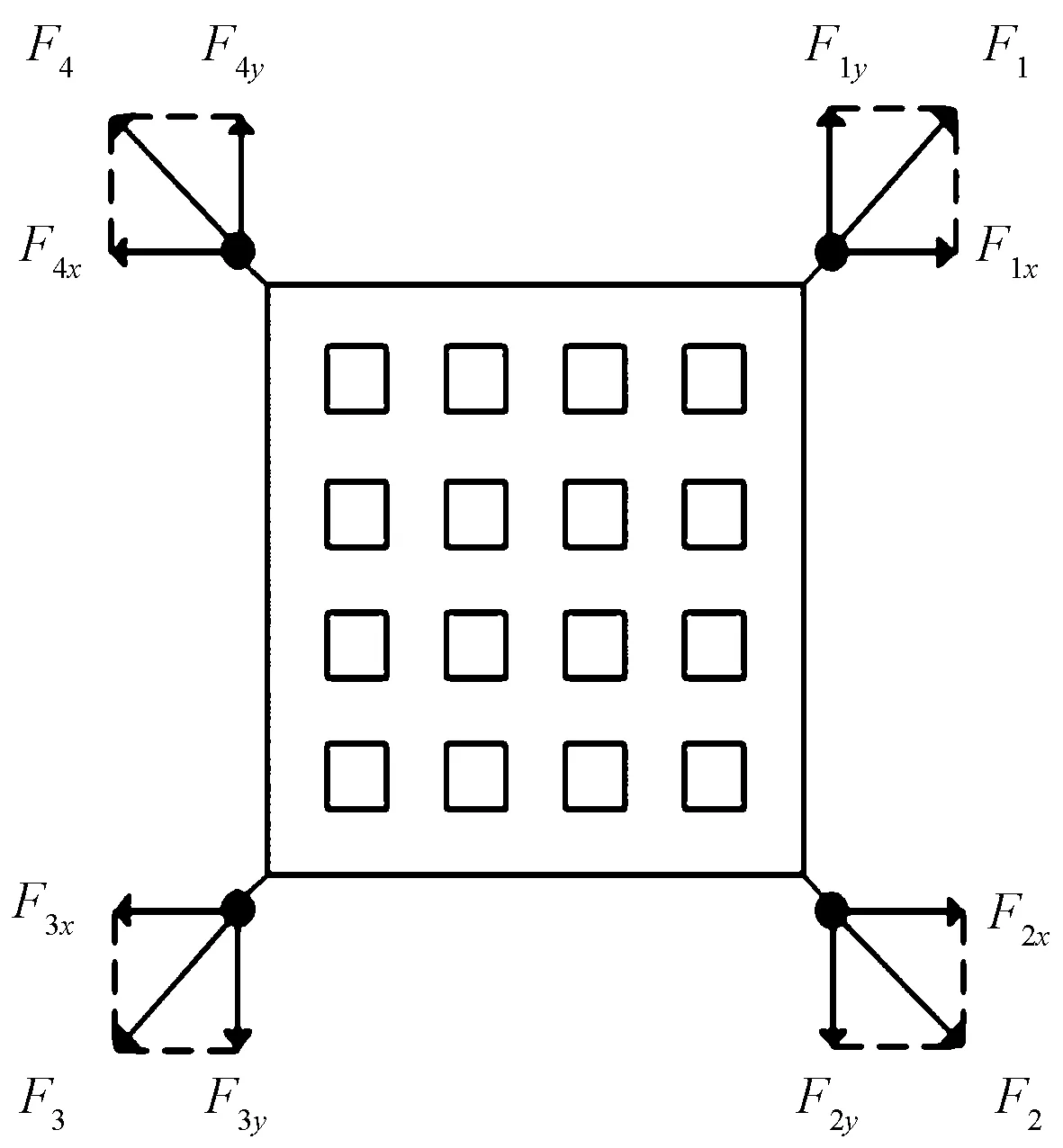
图11 抛射展开质量块速度方向Fig.11 Velocity direction of mass block with projectile expansion
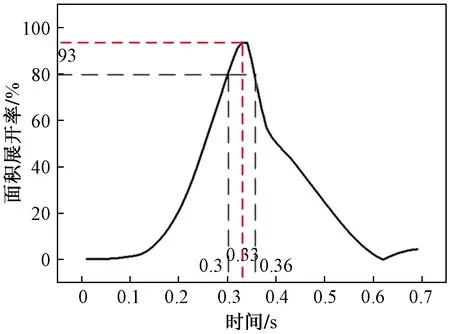
图12 带网展开面积与时间位移关系图Fig.12 Relation diagram of the expanded area and time displacement of belt network

表3 旋转展开发射参数
旋转发射带网飞行姿态如图14所示,带网由四个牵引质量块牵引,逐渐展开至最大,达到最大展开面积后,带网进入收缩状态。
图15为抛射展开与旋转展开对比图,由图15可知,抛射最大展开率为93%,略高于旋转展开最大展开率90%,抛射展开较快,旋转展开较慢,保形时间两者基本相同。旋转展开较为平顺,而抛射展开曲线存在一定的突变。综上所述,抛射展开速度快,最大展开面积大。旋转展开过程稳定。考虑收缩阶段存在与目标碰撞问题,抛射展开突变影响较小,抛射展开略优于旋转展开。实际捕获任务中可根据抛射展开速度、最大展开面积以及保形时间的优先级确定带网展开方式。

图13 旋转发射质量块速度方向Fig.13 Rotation of the velocity direction of the transmitting mass block

图14 空间带网旋转展开过程仿真图Fig.14 Simulation diagram of the rotation and expansion process of spatial belt network
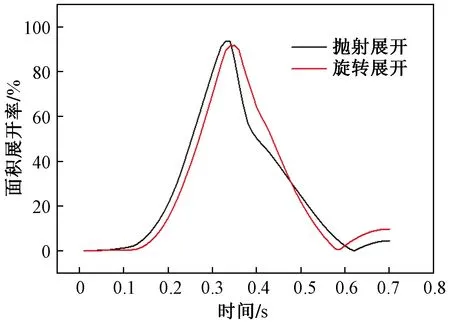
图15 抛射展开与旋转展开对比图Fig.15 Comparison of projectile expansion and rotation expansion
3 结论
基于弹簧-质点法的思想,建立了带网动力学模型,采用MATLAB实现了带网的自由悬垂仿真。并通过ABAQUS对比验证。对带网展开方式进行仿真对比,得到以下结论。
(1)通过与ABAQUS基于膜单元的带网模型进行仿真对比,验证了动力学模型的准确性。
(2)讨论了剪切弹簧与弯曲弹簧对模型的影响。无剪切弹簧时抛射最大展开面积减小,保形时间缩短,弯曲弹簧对模型影响较小。
(3)对比了带网与绳网抛射展开过程。结果表明带网在提高了对高速碰撞目标包容性基础上,抓捕性能保持良好。可以采用带网代替绳网。
(4)在此模型的基础上,重点进行了空间带网的直接抛射展开及旋转展开仿真,将两种展开方式进行对比,得出抛射展开具有速度快、最大展开面积大的优点。
(5)旋转展开过程平稳,保形时间长。实际捕获任务中可根据要求优先级选择合适的展开方式。为空间带网在太空环境中的仿真研究提供了参考。
猜你喜欢
数学小灵通(1-2年级)(2022年3期)2022-03-17
中学生数理化(高中版.高考理化)(2021年9期)2021-11-05
矿产勘查(2020年11期)2020-12-25
航空发动机(2020年3期)2020-07-24
模具制造(2019年10期)2020-01-06
试题与研究·高考理综物理(2016年3期)2017-03-28
试题与研究·高考理综物理(2016年3期)2017-03-28
凤凰生活(2016年4期)2016-04-07
爱你(2015年1期)2015-11-17
爱你(2015年2期)2015-11-14