
小型四旋翼飞行器控制系统的研究
2020-02-22 02:57薛荣辉
通信电源技术 2020年2期
薛荣辉
(西安航空学院 电子工程学院,陕西 西安 710077)
0 引 言
四旋翼飞行器作为一种垂直起降飞机,具有独特的优点,操作灵活、结构简单、载重能力强,在军事、民用方面都发挥了极大的作用。其具体应用特点可以归纳为如下5个方面:(1)空间狭窄或体积较小不方便人活动的地方;(2)可以与电子产品组合;(3)危险场所;(4)适合长时间工作;(5)结构简单,成本低[1-2]。
具有自主控制的四旋翼飞行器由于飞行器的设计需要多个领域共同完成,涉及到多个学科相交叉,所以对知识的应用和处理的要求也就更高,制约了飞行器的发展。本设计飞控原理主要通过STM32采集传感器和陀螺仪实时检测信号,通过陀螺仪来获取当前的飞行姿态,实时信号与输入信号作对比,再将数据传输到无线端驱动模块驱动飞控板进行通信,实现飞行器的起飞、转向、悬停、降落等控制[3]。
1 四旋翼总体设计
设计主要包括遥控板和飞控板的硬件设计和软件控制设计。遥控板采用四相遥感,左手控制油门,右手控制飞行方向。遥控板上安装了无线传输模块,可以将STM32的指令通过其传达给飞控板,从而实现飞行器的控制。飞控板由无线模块、蓝牙模块、MPU6050传感器模块等组成,无线模块进行数据的接收和发送,传感器进行飞行器自身姿态的实时结算,再驱动四旋翼上的四个720空心杯使其进行旋转,带动整个飞行器的飞行。四旋翼飞行器系统的遥控端和飞控段的主控制器均为STM32F103,通过程序的设定使得ADC的外设采集数据,然后把采集到的数据通过2.4G无线通信模块发送至飞控板。飞控板的主要任务就是通过STM32控制外设通过ADC采集数据,然后通过无线模块将数据传送到飞控板中,再由MPU6050传感器检测到飞行器当前的飞行姿态,并且解算出当前的系统姿态,接着根据遥控板发送的目标姿态和当时的姿态差计算出PID电机增量,此处是一个反馈操作,最后驱动电机控制飞行器。飞控板设计流程如图1所示,遥控板设计流程如图2所示。
2 四轴飞行器运动控制系统的基本工作原理
飞行器的运动是由4个旋桨转动实现桨叶的排列(见图3),同一轴1、3电机运动方向,2、4电机运动方向要一致,两组电机旋转方向必须相反,气流平稳不会使飞机倾斜。通过左手遥控油门的大小从而控制飞行器的飞行高度。要实现飞行器的动作,必须通过4个电机的控制信号驱动电机配合转动完成。
3 处理器选型及控制算法
本文采用STM32F103增强型处理器[4-6]。STM32具有价钱低、功能强大、容易上手等优点。控制采用PID算法,P代表比例环节,I代表积分环节,D代表微分环节。图4为PID设计框图。
通过PID控制器实现无人机运动,本次设计分别建立俯仰、翻转、偏航通道的传递函数,通过PID控制器降低无人机系统的稳态误差。
4 结 论
本文主要介绍四旋翼无人机的构成及控制,控制选用STM32F103控制器。通过4个传感器检测飞行器叶片的位置,与遥控器输入信号对比,从而实现飞行器的控制。
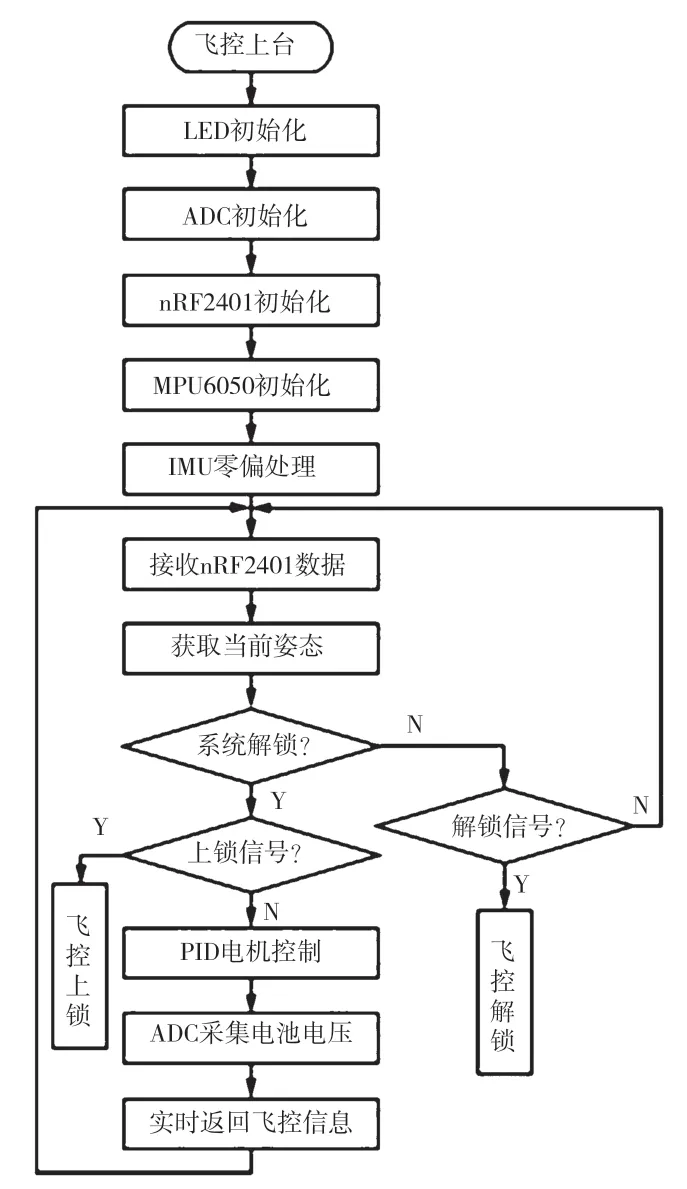
图1 飞控板软件程序设计流程图
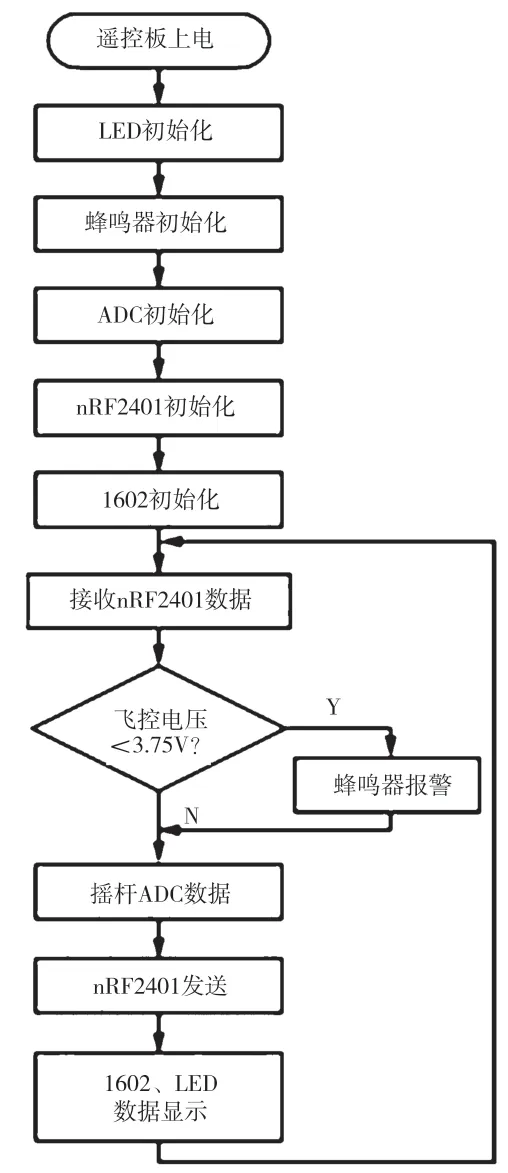
图2 遥控板软件程序设计流程图
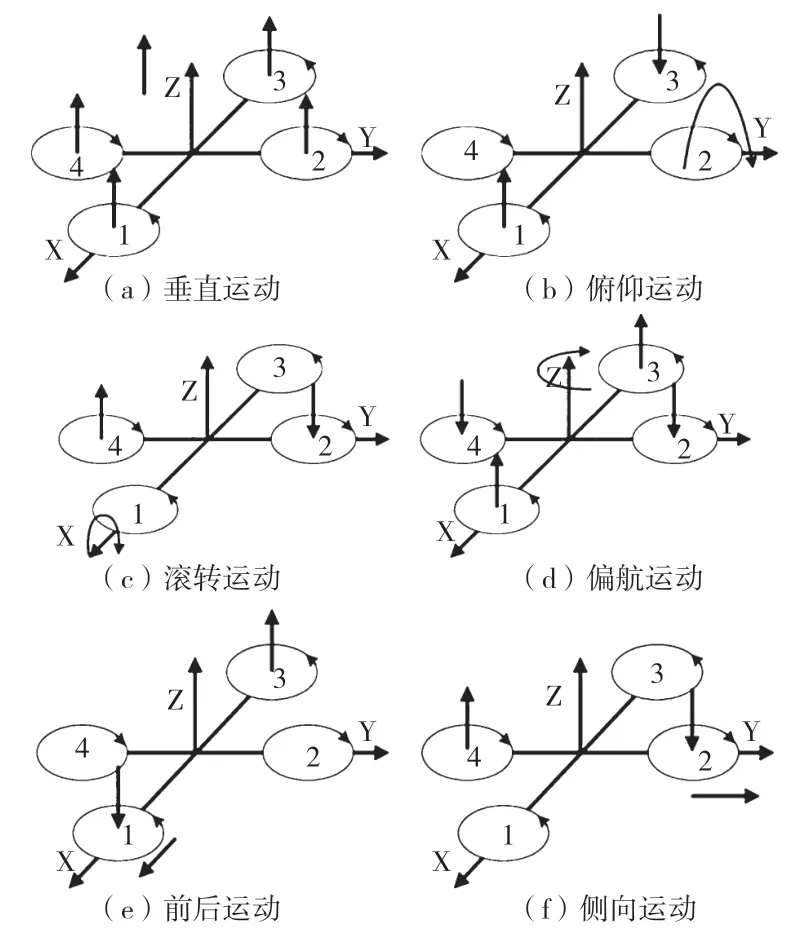
图3 四旋翼的六种运动
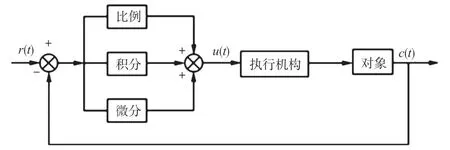
图4 PID的模拟控制系统原理框图
猜你喜欢
小学生优秀作文(低年级)(2021年11期)2021-12-06
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
民用飞机设计与研究(2019年2期)2019-08-05
电子制作(2019年9期)2019-05-30
语文世界(小学版)(2019年2期)2019-02-24
科技创新导报(2017年1期)2017-03-21
北京航空航天大学学报(2016年8期)2016-11-16
小天使·一年级语数英综合(2014年7期)2014-06-26
环球时报(2012-03-28)2012-03-28
