
基于GIS的厂区物流车辆监控系统设计与实现
2020-02-22 03:09袁敏
现代信息科技 2020年18期

摘 要:厂区车辆运输是生产活动的核心,管理好厂区物流车辆就是保障了厂区的生产和安全。文章针对以往厂区车辆监管的痛点,结合GIS、GPS和北斗定位技术,设计出基于GIS的厂区物流车辆监控体系架构,建立了厂区物流车辆监控系统,为厂区交通提供车辆实时定位、监控预警和实时调度等功能,满足业务人员对物流车辆运行情况的掌握,从而推进厂区运输车辆的高效使用。
关键词:GIS;车辆监控;厂区物流运输
中图分类号:TP311.52;TP391.44 文献标识码:A 文章编号:2096-4706(2020)18-0165-04
Abstract:Vehicle transportation in factory zone is the core of production activity. To ensure the logistics vehicles in factory zone is to guarantee the production and safety of factory zone. This paper in view of the pain points of vehicle supervision in factory zone and combined with GIS,GPS and Beidou positioning technology,designs a GIS-based surveillance system architecture for logistics vehicles in factory zone and builds a factory logistics vehicle monitoring system to provide factory transportation with real-time positioning,monitoring and early warning,real-time scheduling and other functions for vehicles,which can satisfy the business personnel to know about the operating situation of logistics vehicles,so as to contribute to the efficient use of transport vehicles in factory zone.
Keywords:GIS;vehicle monitoring;factory zone logistics transportation
0 引 言
2017年國务院办公厅发文《关于进一步推进物流降本增效促进实体经济发展的意见》中也指出要推广应用高效便捷物流新模式。即依托互联网、大数据等先进信息技术,大力发展互联网模式下的物流运输新业态、新模式。传统的物流运输模式需要根据生产情况事先排班和手工调度人员,不仅物流作业效率低下,排班和人员自行调度难免会出现信息不对等的情况,从而造成误工误产。所以,有效管理物流产能,实现车辆和货品之间供需信息的实时共享、精准投运,减少空驶运输和物流资源闲置是本项目建立的核心目标。
厂区物流车辆监控系统利用Spring Boot微服务框架搭建,基于GIS采集了车辆定位信息,实现了车辆实时监控、车辆统计分析及查询、车辆轨迹回溯、电子围栏及超速管理、违规查询及信息发布、车辆异常监控和车辆行程分析等功能。通过系统建设对厂区生产运输作业车辆位置、运输状态信息实时掌控;各归口生产运输车辆管理单位对所管辖厂内生产运输车辆作业分布、行驶线路与区域、作业时段进行全方位监管。
1 厂区物流车辆监管系统架构设计
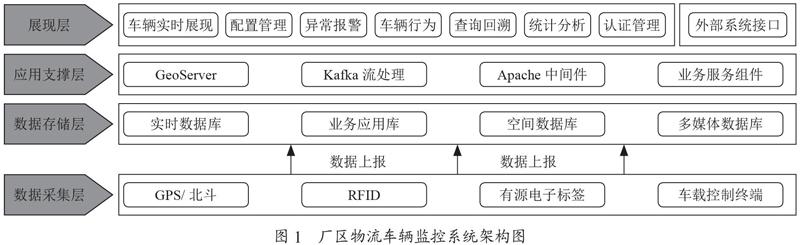
本文通过对某厂区物流车辆的实际业务需求调研发现,该系统涉及的内外部接口庞杂,传输数据量大。因此利用Spring Boot轻量级的微服务框架搭建整体架构,将每个接口单独部署成为服务;数据方面采用读写分离的方式减轻实时数据频繁入库对系统访问带来的不良影响;前端显示设备采用1 920×1 080的大屏,把功能链接及主要信息推送在大屏上,基于GIS展现车辆定位、电子围栏空间范围信息,同时汇总定位数据统计分析车辆行为和行程等。厂区物流车辆监管系统的四层架构如图1所示,包括数据采集层、数据存储层、应用支撑层和展现层,其中采集接口安全贯穿四层架构,接口采用统一的降维处理,确保系统的可靠性和稳定性。
(1)数据采集层:因厂区车辆分普通的运输车辆(包含作业框架车、固废车、原料车、外部运输车辆和无人车)和框架,运输车辆会安装车载终端上传GPS/北斗定位数据;而框架是相对固定的位置,所以采用RFID技术,框架上贴有源电子标签记录框架停放情况,并且可以根据车辆位置联合定位框架。
(2)数据存储层:根据车辆监控系统的功能设计,为不同类型的数据源设计了不同的存储方案。GIS地图服务信息存储在空间数据库,视频或卡口图片信息存储在多媒体数据库,统计分析、配置类信息存储在业务应用库,车载终端的位置信息则存储在实时数据库。
(3)应用支撑层:集成支持GIS地图服务发布的Geo Server服务,利用Kafka做高吞吐的实时数据处理,应用发布采用Apache Tomcat 8.5,并封装了业务服务组件以满足车辆监控系统对应用组件库的需求。
(4)展现层:车辆监控系统展现了车辆实时信息和调度情况,各车辆管理单位通过认证管理和配置管理对管辖范围内的车辆单位、车队、行进路线进行规范和配置,提供车辆出现异常的实时预警,综合以上数据进行车辆统计分析和查询回溯。
2 厂区物流车辆监管系统功能设计
厂区物流车辆监管系统面向运输部车辆运输作业相关各级管理人员、作业车辆驾驶人员,涉及功能模块主要包含以下内容。
(1)综合展示:主要包括电子地图综合展示页面,集成监控、预警、视频等信息综合子模块。
(2)车辆追踪监控:主要包括车辆实时监控、框架定位采集、车辆统计分析、车辆轨迹回溯、电子围栏、超速管理、违规查询等模块。
(3)系统管理:主要包括用户管理、地图管理、数据存储管理、信息调度管理、数据通信管理和系统版本管理等模块。
系统登录页面如图2所示。
3 主要功能实现
3.1 地图服务发布及使用
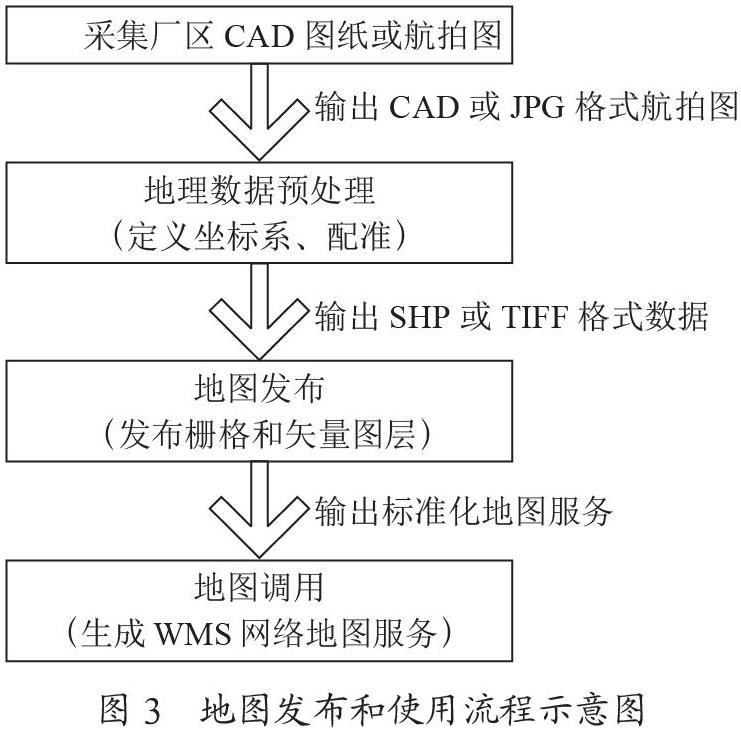
目前流行的地图服务软件有Esri产品和SuperMap产品,但是询价后发现采购成熟的地图服务软件经费昂贵,为了满足本文的车辆定位展示需求,经过技术比较决定采用开源的GeoServer作为地图发布服务工具,OpenLayers作为地图交互组件库。该厂区建设初期留有建设图纸和航拍图,本文利用厂区已有的CAD图纸和航拍图进行矢量和栅格地理数据发布,发布和使用的流程示意图如图3所示。
3.1.1 地理数据预处理
GeoServer支持的发布格式包括SHP、TIFF等,无论是CAD的矢量厂区图还是JPG的航拍图都不符合GeoServer的格式要求,所以需要对地理数据进行预处理,即格式转换。本文借助ArcMap软件工具对厂区现有数据进行格式转换。
由于CAD和航拍图都不具备空间地理坐标信息,而车辆定位信息采集的是GPS数据,所以需要把地理數据定义坐标系,使其具备空间信息,便于车辆精准定位,本文采用WGS-84大地坐标系。
配准是把一个区域内的图像图形进行地理坐标匹配,本文采样了四个控制点,把JPG的航拍图与实际地理空间位置配准,矢量数据无需进行此项操作。
定义好大地坐标和配准后,把处理后的地理空间数据按照所需的数据格式导出,作为地图发布的基础数据。
3.1.2 地图发布
首先安装GeoServer,本文使用最新发布的2.17.2稳定版进行安装部署,部署成功后访问登录GeoServer的网页版管理控制台,进行地图发布。发布时需要针对数据格式选择合适的数据源,如SHP格式就要选择Directory of spatial files矢量数据源,而TIFF格式就要选择GeoTIFF栅格数据源。发布好的地图是WMS网络地图服务。
3.1.3 地图调用
OpenLayers让动态地图显示在网页上更加容易,它可以展示标准地图服务格式,在网页内引入正确的OpenLayers库,定义好展现地图的div容器,按照API编制展示的JS脚本代码即可。成功访问厂区栅格地图服务后,地图应用效果图如图4所示。
3.2 无人车车辆坐标转换
厂区车辆包括作业框架车、固废车、原料车、外部运输车辆和无人车,其中无人车是室内运行车辆,其定位采用的东北天导航坐标系,所以如何把无人车定位在大地坐标系的地图上是本系统需要解决的问题。通过翻阅相关文档,得到从东北天坐标系到大地坐标系的坐标转换公式[1]:
其核心思想是先把东北天坐标系(E,N,U)转换为直角坐标系(X,Y,Z),再由直角坐标系转换为大地坐标系(B,L,H)。本文首先利用式(2)采集到的东北天坐标系转换为直角坐标系(X,Y,Z),由于东北天坐标系又称为站心坐标系,根据坐标原点的不同,后续采集到相对坐标会随着物体运动产生偏移量,所以需要将无人车接收到的第一个信号作为坐标原点,包括经纬高(B0,L0,H0)和转换后的直角坐标原点(X0,Y0,Z0)。
得到直角坐标系(X,Y,Z)数据后,通常采用迭代法[2]进行大地坐标求解。方案很多且成熟,这里不再赘述。在本文利用以上转换过程得到的大地坐标与实际坐标比对,偏差在0.000 4,基本符合展示需求。
3.3 实时车辆数据采集与定位
为保障车辆定位的实时性,本文前端采用WebSocket显示定位车辆,避免长轮询带来的时间等待;后端将设备采集的定位数据直接放置在Kafka进行排队等待,前端领取消耗后才将定位数据进行入库操作,避免对数据库频繁读写操作。
目前前端获取实时数据常用的方案为定时长轮询,然而定时方案有个弊端,时间设定太长不能直观反映车辆实时位置,时间设定太短频繁访问数据层,会给系统带来访问压力。所以,本文整合WebSocket实现后端主动向前端广播消息。后端负责创建连接和发送消息,前端利用Socket对象打开通道并接收消息。
同时为避免实时数据采集和存储频繁对数据库读写带来压力和瓶颈,本文将采集到的设备数据预先放置Kafka流平台中,消费者与Kafka建立长连接后定期从中拉取消息进行定位展现,每个被消费的数据具备有序性。实时车辆数据采集定位流程图如图5所示。
4 结 论
本文基于GIS搭建了厂区物流车辆监控系统,利用GPS/北斗定位信息通过GIS全面且直观地反映了厂区作业框架车、固废车、原料车、外部运输车辆和无人车等各类运输车辆的定位、行为和行程状态等信息,满足了对厂区内物流车辆的有效监控,提升了各类运输车辆的使用效率和厂区整体物流运转的效率,进一步保障厂区物流安全,具备一定的经济效益和使用价值。但后续还需要在车辆智能调度方面做更深层次的算法研究和实现,让厂区物流更加自动化和智能化。
参考文献:
[1] 国务院办公厅.国务院办公厅关于进一步推进物流降本增效 促进实体经济发展的意见 [R/OL].(2017-08-17).http://www.gov.cn/zhengce/content/2017-08/17/content_5218207.htm.
[2] 孙旭民.矢量闭合差在空间直角坐标系和站心坐标系下的转换 [J].物探装备,2017,27(1):48-49+52.
[3] 凌震莹.大地坐标系与站心地平直角坐标系的坐标转换 [J].声学与电子工程,2009(4):31-34.
[4] 徐小君.以物联网为基础的车辆远程监控预警系统 [J].现代信息科技,2019,3(9):192-193+196.
[5] 方雄利,陈绪兵,余良伟,等.基于RFID的工厂物流车辆调度系统研究 [J].物联网技术,2017,7(8):108-110.
作者简介:袁敏(1986.08—),女,汉族,四川内江人,工程师,硕士研究生,研究方向:地图学与地理信息系。
