具有声光系统的无人机的应用
2020-03-03 14:36张维迪黄汉强赖明治蒙祥达
今日自动化 2020年10期
关键词:无人机
张维迪 黄汉强 赖明治 蒙祥达
[摘 要]针对现有的传统无人机存在的搜救作业效率低下和容易发生二次伤害等不足,研究了一款增添了声光系统的新式无人机——户外小精灵,主要讨论了户外小精灵的应用。以一系列具体的实例为主,通过与传统无人机在事件中的应用作对比,从而展现出户外小精灵的优势。
[关键词]无人机;户外小精灵;搜救;声光系统
[中图分类号]TP751 [文献标志码]A [文章编号]2095–6487(2020)10–00–03
Application of Unmanned Aerial Vehicle With Acousto-optic System
Zhang Wei-di,Huang Han-qiang,Lai Ming-zhi,Meng Xiang-da
[Abstract]Aiming at the inefficiency of search and rescue operation and the vulnerability to secondary damage, a new unmanned aerial vehicle (UAV)——Outdoor elf. This paper mainly discusses the application of outdoor elves. A series of concrete examples are used to show the advantages of outdoor elves by comparing with the traditional UAV in the event.
[Keywords]UAV; Outdoor elf; search and rescue; sound and light system
1 无人机的利用现状
1.1 现状
无人机是一种不载人的,可重复利用以及具有自主飞行能力的新型飞行器,随着当前高新技术的迅猛发展,无人机在科研及监测方面的应用也十分广泛,凭借无人机携带高分辨率摄像机表现出优秀快速航测反应能力以及其体积较小便于携带、工作效率高、摄像头稳定性好、机身机动性强等诸多优势,在国土航测、影视航拍、新闻报道、农业植保、城市规划、地质勘探、大气探测、灾难救援、国防安全等领域都表现出强烈的发展劲头,尤其是在灾难救援领域内,从512汶川大地震、大连泄油事件、义马气化厂爆炸事故等无人机都发挥了重要的作用。
1.2 传统无人机的不足
无人机虽然有着很多的優势,但是也有其缺点所在。传统无人机的续航能力一般在20~30min之间,且其承载能力有限;传统无人机的通信系统只限制在摄像头画面的传输,没有喊话发声的系统模块;传统无人机的不可靠性高,抗风能力相对较差,如遇大风等特殊天气,会导致信号受到干扰,容易偏离航线,并且不易寻找;传统无人机没有灯光模块,无法在较暗的环境中进行正常高效的飞行,大大限制了无人机的应用。
1.3 无人机关键技术
无人机关键技术主要包含以下几个部分:飞行控制技术、机身结构设计技术、数据链技术、动力系统技术。
1.3.1 飞行控制技术
自飞控系统诞生以来,飞控系统就是直接影响飞行品质的关键系统,飞行控制律的设计又是飞控系统的核心技术。下面简介几种控制方法:
1.3.1.1 PID控制
PID控制器是最早实用化,目前应用最为广泛的控制器。PID控制器简单易懂,主要由比例控制、积分控制与微分控制组成,在使用中并不需要精确地数学模型且只需要设定三个参数,更具有可靠性、鲁棒性好等优点。但是随着被控制对象(无人机等)愈加复杂,单一PID应用的局限性越来越明显,比如传统PID参数确定复杂、难以适应非线性控制系统、抗干扰性能差等。因此随着智能算法与计算机技术的不断进步,一些复合PID控制器应运而生。
1.3.1.2 鲁棒控制
1972年,Davison首次提出了鲁棒控制。鲁棒性是指控制系统的健壮性。用以表示控制系统对特性或者参数扰动的不敏感性,是异常或危险情况下系统生存的关键。相应的,鲁棒控制就是指一个以提高控制算法可靠性为主要目标的控制器设计方法。但是由于鲁棒控制一般工作在系统的较差状态下,因此也会造成系统稳态精度较差的问题,控制器阶数过高,控制系统过于复杂也是其一大缺点。
1.3.1.3 动态逆控制
动态逆方法是反馈线性化方法中的一种,属于伪线性系统。其基本思想是利用全状态反馈抵消原系统中的非线性特性,用伪线性系统来描述输入输出之间的关系,从而利用线性控制律对新系统进行控制,线性控制律和非线性反馈律也就是最终的非线性控制系统。动态逆控制能够满足大迎角、超机动等非常规控制要求,但是其对建模精确度要求极高,建模误差的存在将影响其控制性能,甚至是恶化。而通过与其他控制方法结合可以很大程度上改善这一问题。
1.3.1.4 反步控制
反步法,又称反演设计法,是一种非线性系统自适应控制器的设计方法。该方法以用若干个子系统来代替复杂的高维非线性系统为基本思想,通过反向递推各子系统的Lyapunov函数,设计控制器,实现系统的全调节或跟踪,最终达到期望的性能指标。该方法可以有效地利用非线性系统本身固有的非线性特性,保持全局的稳定性,使得控制效果得到极大地提升。
1.3.1.5 滑膜变结构控制
变结构控制的思想主体内容为滑膜变结构控制。其设计思想为:控制器根据系统输出变化,按照一定的内部反馈控制结构,使系统状态从状态空间中的任一点向滑膜面收敛,并在滑模面上滑动,最终达到平衡点。该控制器的设计核心在于滑平面的选取与切换函数的设计。滑膜变结构控制鲁棒性较强,对模型误差、参数不确定性和外部干扰反应迟钝。但其也存在一个固有缺点——外界干扰与系统惯性带来的沿滑模面的高频抖动。滑模面的选取在一定程度上可以解决这一问题,因此这也成为滑膜变结构控制器设计过程中的一大难点。
1.3.2 机体结构设计技术
无人机结构设计是无人机总体设计中的重要一环,总的来说,相对于有人机,无人机机体结构设计技术主要具有以下几个特点:
(1)结构设计中各种安全系数的阈值普遍偏低。无人机由于不需要考虑飞行员的安全问题,主体结构设计较为简洁明确,降低了对机体安全裕度的控制要求。
(2)机体结构设计模块化、整体化程度高。摆脱有人机的诸多限制,无人机机体结构的模块化与整体化更进一步。将细小零件整合设计,减少结构的连接件、紧固件,可以减少结构集中应力区域数量,同时也可以保证结构强度与刚性特性的连续性,增强了机体结构可靠性。
(3)载荷舱设计所占比重增大。无人机的载荷决定了其所能完成的任务种类以及效果。
2 声光无人机设计
2.1 灯光设计
2.1.1 灯光介绍
LED,俗称发光二极管,是一种能够将电能转化为可见光的固态的半导体器件,它可以直接把电能转化为光能。LED的心脏是一个半导体的晶片,晶片附在一个支架上,一端是负极,另一端是连接电源的正极,使整个晶片被环氧树脂封装起来。半导体晶片由两部分组成,一部分是P型半导体,在它里面空穴占主导地位,另一端是N型半导体,这边主要是电子。但这两种半导体连接起来的时候,它们之间就形成一个P-N结。
2.1.2 发光原理
当给发光二极管加上正向电压后,从P区注入到N区的空穴和由N区注入到P区的电子,会在P-N结附近数微米内分别与N区的电子和P区的空穴复合,产生自发辐射的荧光。由P型半导体和N型半导体组成的晶片,通过发光核心的过渡层使其少数载流子与多数载流子复合,产生多余的能量并以光的形式释放出來,从而使灯光装置发光。
2.2 声控设计
2.2.1 发生功能
在高层建筑轻生现场以及引导人员疏散等救援现场,经常由于现场车辆人员拥挤,声音嘈杂。导致救援人员使用的扩音器的效用降低。此时,使用无人机可以实现现场的高空喊话增强被救助者的信心,提高救援的效率。
2.2.2 调试过程
成焊接成功以后,在安全的情况下插入储存卡,调试电位器。看有无其他杂音。确定双声道输出音质正常后,拔出储存卡。安装电池板。在焊接未成功的情况下,仔细使用万用表检测电路有无短(断)路情况,以及检查各元器件正负板有无接反情况。之后将该装置安装在飞控上方的机架上,并且接通手机蓝牙,对手机进行喊话,声音从无人机的发声装置传出,成功发声。
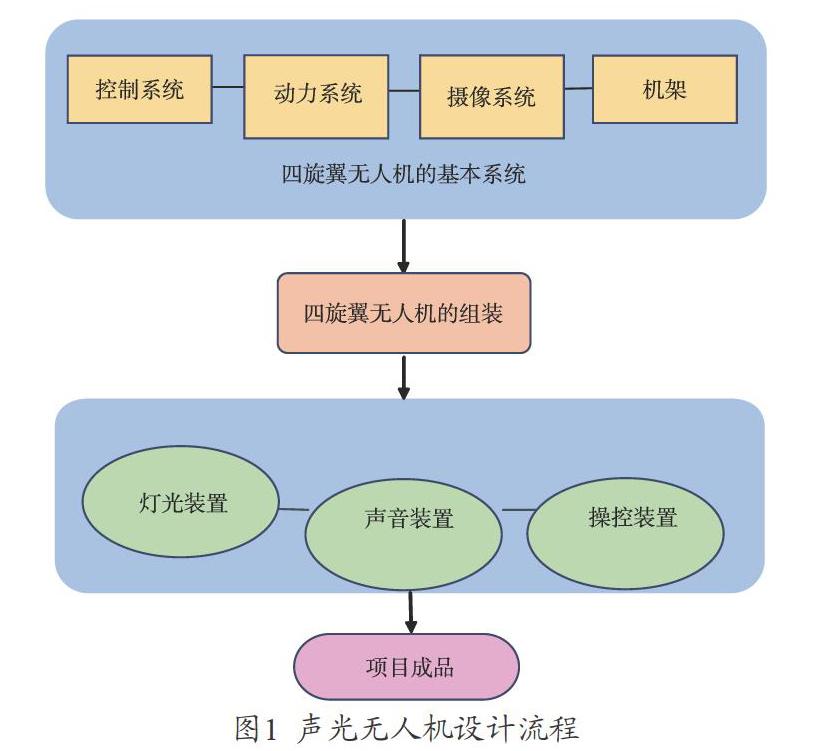
2.3 设计流程
图1为声光无人机设计流程,四旋翼无人机的基本系统;由控制系统、动力系统、摄像系统以及机架构成,其中还包括灯管装置、声音装置以及操控装置。
3 应用实例
(1)随着无人机行业的蓬勃发展,特别是在测绘领域内,无人机的应用越来越普遍,但是使用传统无人机时难免会出现一些技术及设备方面的问题。在使用GPS追踪定位中,无人机主要用于远距离的作业。使用传统无人机进行追踪定位时,无人机的升空距离有限,飞行条件苛刻,如果进行超视距作业,则会超出数据的有效通信范围或者受到遮挡而中断数连接,从而导致飞控信号中断无法实时监控无人机的位置,且发生意外情况下无法获取无人机的位置,使得搜寻任务难度较大。
本文设计研制的具有声光装置功能的四旋翼无人机——户外小精灵,能够有效实现无人机位置的实时获取和回传,使用户可在手持设备端或管理中心直观监管飞机动态。在进行超视距作业时,可以通过控制声光装置进行发光发声,有效定位无人机的位置,实时监控无人机的情况等。并且能够解决判别作业环境,无人机故障丢失后难以寻找等问题。此外,还可以利用本文设计的具有声光装置的无人机结合卫星定位,基站定位,通讯网络等技术的结合实现无人机的实时追踪和手机定位,并且可以搭建无人机追踪系统平台等等。
(2)2020年1月全国新冠肺炎疫情爆发以来,各地通过无人机进行防疫物资配送、城市乡村疫情巡查、抗疫专门医院建设等方式,第一次将无人机作业全面应用于国家公共应急防疫中,实现多领域的“无接触”运行,提高了防疫工作效率,减少了因人员聚集和接触带来的病毒扩散。此外无人机作业还多应用于搜救等公共服务中。
①大多数自然灾害及突发事故现场的环境复杂多变,大型的侦查搜救设备无法进入,为有效保障搜救人员的安全,在搜救作业时通常使用无人机对现场进行勘察。使用传统无人机进行搜救勘察,仍然存在一些弊端,例如无法检测到障碍物下的受难人员,无法在夜晚进行紧急搜救等等。
户外小精灵是具有声光装置的无人机可以有效解决此类问题,还可基于此类无人机搭载生命探测等特殊设备,形成空中搜救探测体系,有利于更高效准确的展开搜救,减少不必要的伤亡。
②实验:在一个事故高发且交通拥堵的高架桥发生一起严重的交通事故,且由于交通事故而导致高架拥堵,大量汽车被困于道路上。为防止交通瘫痪,受伤人员危及生命,此时启用无人机进行空中喊话疏通道路。遥控人员对遥控进行喊话后,声音立即从无人机上的发声模块发出,音量适中,喊话内容清晰。交通管理人员通过对无人机视角下各个车辆以及道路的分布情况,通过喊话对车辆进行有效疏通,进而高效的解决交通事故。
4 应用前景
4.1 山林搜救
在不通电的山林地区进行夜间野外复杂地形的移动时,无人机的灯光装置可以通过照明,可获取山区森林的基本面貌,在夜晚进行搜救作业,并且对现场进行喊话,让搜救人员能够在黑暗的地区快速安全的通过,使得被困人员能够更快的被搜救人员找到,提升了夜间突发事件和搜救的处置能力和效率。
4.2 灾情传递
在大范围的地区发生自然灾害时,户外小精灵的发声喊话装置可以及时传递灾情,保障救灾的指挥调度,满足灾区民众的联络需求,同时可以进行喊话向公众广播。
4.3 矿区监管
户外小精灵具有声音装置的优势,无需接触危险区就可以获取陡峭山坡的周边环境信息,观测矿区山体的勘探情况与滑坡情况,从而远程对矿区工人进行高空喊话作业,确保对矿区的开发能够安全有效的进行。
5 结束语
无人机是是利用无线电遥控设备和自备的程序控制装置的不载人飞机,包括无人直升机、固定翼机、多旋翼飞行器、无人飞艇、无人伞翼机。本文通过对声光系统无人机进行了设计,并对其应用实例进行了分析,提出了本设计无人机应用前景。
参考文献
[1] 张挺.美国军用无人机发展概述[J].电光系统,2013(3):17-22.
猜你喜欢
电脑知识与技术(2016年28期)2016-12-21
新教育时代·教师版(2016年27期)2016-12-06
农机使用与维修(2016年10期)2016-11-10
人间(2016年26期)2016-11-03
科技视界(2016年22期)2016-10-18
企业导报(2016年9期)2016-05-26