基于激光追踪测量的电气控制系统研究
2020-03-03 14:36侯钰郭伟涛
今日自动化 2020年10期
关键词:电气控制系统
侯钰 郭伟涛

[摘 要]在基于激光追踪测量的电气控制系统研究过程中,通过四象限光电传感器的应用,实时测量激光束光斑偏移量,并在可编程多轴运动控制器中对输入的偏移量进行处理,同时与伺服电机构成闭环系统相结合,PID利用工程整定方法进行有效调节,能够满足激光追踪测量系统测量的快速性、平稳性以及实时性测量要求。通过相关试验可以证明,此控制系统有着良好的追踪性能良好,并且运行状态平稳。本文应基于激光追踪测量系统原理的,可用于激光追踪测量的电气控制系统进行研究,确保控制信号的实时传送及精密追踪能够最终实现。
[关键词]激光追踪测量;电气控制系统;PID
[中图分类号]TP273;TN249;TM383.4 [文献标志码]A [文章编号]2095–6487(2020)10–00–03
Research on Electric Control System Based on Laser Tracking Measurement
Hou Yu,Guo Wei-tao
[Abstract]In the research process of the electrical control system based on laser tracking measurement, through the application of the four-quadrant photoelectric sensor, the laser beam spot offset is measured in real time, and the input offset is processed in the programmable multi-axis motion controller At the same time, combined with the servo motor to form a closed-loop system, PID uses engineering tuning methods for effective adjustment, which can meet the rapid, smooth and real-time measurement requirements of the laser tracking measurement system. Correlative tests can prove that this control system has good tracking performance and stable operation. This article should be based on the principle of laser tracking measurement system, which can be used for laser tracking measurement of electrical control system to study, to ensure that the real-time transmission of control signals and precise tracking can be finally realized.
[Keywords]laser tracking measurement; electrical control system; PID
隨着工程测量技术及以精密工业的快速发展,在汽车工业、航天、航空、造船等行业中得到广泛应用,同时对测量精度以及范围的要求越来越高,其中基于激光跟踪测量的电气控制系统具有测量动态性能良好、测量范围大以及可实现现场实时测量等优势,因此加大此系统的研究力度,有着重要的现实意义。
1 激光追踪控制原理概述
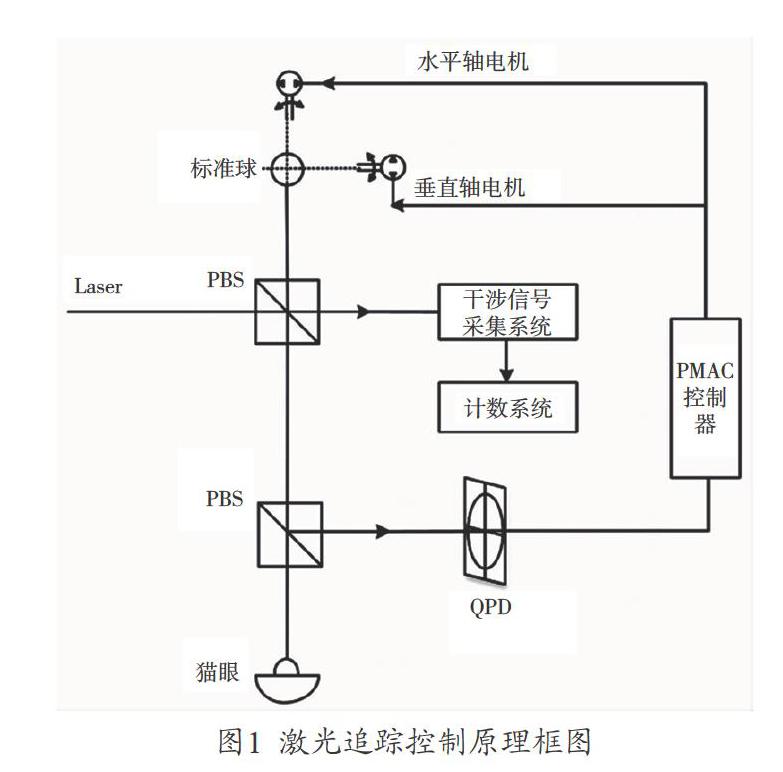
激光追踪控制原理主要为:激光光束从光源发出并通过偏振分光镜处理形成透射光及反射光2种光束,前者为参考光束,后者为测量光束[1]。后者再经过猫眼反射及分光镜处理又形成一束穿透PBS的光束,以及经过PBS反射的光束,前者由其所照射的标准球反射后,经PBS再次反射,在干涉信息采集系统中此光束与参考光束共同形成了干涉信号,通过光电信号器对此类信号进行接收、处理,并输入至计数系统中对猫眼移动距离进行计算;后者反射至四象限光电传感器中,通过传感器对猫眼位置移动量进行感知,一旦猫眼出现移动时,光斑与四象限光电传感器中心位置出现偏离,并形成位置信号,PMAC控制器将采集及处理后的信号对与两轴系相连的伺服电机进入控制,使激光光束对猫眼集位移的有效追踪测量得以实现。其控制原理如图1所示。
2 系统设计概述
在进行追踪测量过程中,电气控制系统需要对激光追踪测量系统运行进行实时控制,使系统安全性得到有效保障。电气控制系统主要核心为PMAC控制器,同时水平轴电机和垂直轴电机运转由伺服驱动模块进行控制,两者共同构成闭环控制单元。在进行光斑偏移量实时测量中,通过四象限光电传感器的运用,并利用控制器对偏移量信号进行处理。另外控制系统可借助电子手轮的操作,实现自动和手动控制的自由切换,在进行系统运行前,对光斑在传感器上的位置进行调整,保证其处于传感器的中心位置。同时伺服电机运动范围利用垂直限位开关和水平限位开关进行有效限定,从而确保追踪测量系统运行的安全性。其中电气控制系统总体结构如图2所示。
首先需要对追踪测量系统进行开机检测,确保正常后对光斑在传感器中心位置进行测量,如光斑不在中心位置,可利用手轮对其位置进行有效调整,确保其处于传感器中心位置,如光斑已处于中心位置,再开启系统对猫眼进行测量追踪。同时系统对限位信息进行实时检测,如启动限位开关,则追踪测量系统停止运行。
2.1 控制模块
在高精度激光追踪测量系统运用中,需要对追踪伺服加强控制,并且其控制性能能够对追踪测量系统的追踪精度和速度产生直接影响作用。系统控制单元主要可采用PMAC运动控制器系列的运动控制卡[2]。运动控制卡可对各类任务进行优先级别自动判断,使多任务实时处理得以实现,使系统控制精度及运行速度有效提高。目前所采用的四象限光电传感器对激光光束偏移量进行测量时,其感光灵敏度的典型值可达到0.6 A/W,光敏面面积可达到9 mm×9 mm。另外系统可利用电子手轮的功能实现自动和手动的控制切换,其功能主要有:对电机移动方向,以及电机启动、急停、停止进行控制,并对电机移动速率进行调整。电子手轮与控制卡通过端口进行相连;控制卡与限位开关及伺服驱动模块利用四通道转接板进行边接,位置信号经过光电传感器模块,利于AD转接板传输至控制卡。
2.2 调节伺服电机PID参数
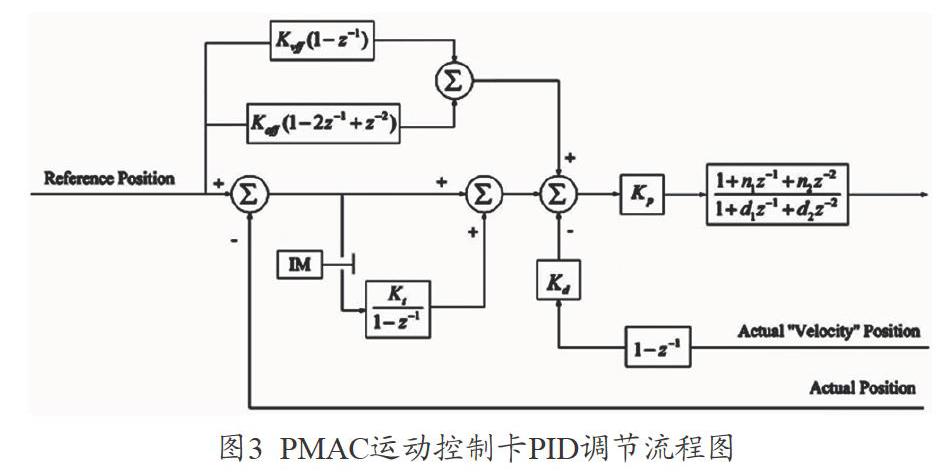
在追踪测量系统中,由于信号进入编码器,再与指令信号进行比较运算之间存在延时,通过前馈控制的引入,能够使系统延时时间有效减少,并对伺服电机的PID参数进行调节,硼保控制效果最佳,并将其在执行命令轨迹中加以应用,使反馈时间有效节约,位置误差建立可予以忽略,只需要对此估计中的误差予以反馈。控制卡PID调节流程如图3所示。
如图3所示,比例增益系数为Kp,积分增益系数为Ki,陷波系数为n1、n2、d1、d2,积分模式为IM,Kd为微分增益系数,加速度前馈系数为Kaff,速度前馈系数为 kVff[3]。其中系统快速性受到比例增益系数的大小的直接影响,比例增益系数越大时,系统调节精度越高、响应速度越快,但系数一旦过大,会使系统不稳定性增加,如系数过小,会降低调节精度。积分增益系数可对系统静态误差予以消除,此系数若过大,会加大系统振荡次数;系数若过小会影响系统调节精度。微分增益系数对系统动态特性有改善作用,但如此系数过大或过小,都会加大超调量,造成系统调节时间过长。因此需要对适宜的量值进行合理选择,才能确保最佳过渡过程的实现。另外速度前馈系数主要能够使微分增益或补偿电机环路阻尼所带来的跟随误差减少,加速度前馈系数对因惯性所带来的跟随误差进行补偿。
3 相关试验分析
通过对追踪测量系统展开相关试验,能够进一步对激光追踪电气控制系统性能进行验证。首先对伺服电机PID前馈控制参数进行调整,保障电机平稳运行,再通过追踪测量试验的实施,对系统追踪速度和精度进行观察。
3.1 PID调节试验
首先通过闭环控制伺服电机的选用,能够使低速运行平稳、回转精度高、响应速度快、启动电压低等要求得满足,PMAC控制器对电机进行有效控制,使其能够准确、快速地移动至目标位置。
控制器通过相关软件工具的应用,能够实现P参数的有效调节,还能对电机速度及加速度特性进行优化。通过对比例增益系数及微分增益系数进行设计,使执行阶躍响应得以实现,有效提高和保障系统运行的稳定性及高效性。另外系统的阻尼较小或者刚性较大时,会导致脉冲响应曲线出现振动和超调现象,可对参数进行不断调整,从而使系统控制实现最优化。
对阶跃响应进行有效调整后,对正弦波响应曲线进行观察,从而实现对前馈参数和积分增益系数的有效调节,使系统跟随误差减少。在追踪测量系统伺服电机正弦波响应曲线中,实际运动曲线与指令位置曲线之间相近似,如实际速度曲线出现毛刺现象,则表示电机运动过程中存在震动情况,通过相关测试表明,此现象对电机跟随不产生影响。另外跟随误差可利用前馈参数进行调节,使其在零点处进行上下浮动[4]。响应曲线图如图4所示。
3.2 追踪测量试验结果
在直线导轨上,通过螺旋微动平台进行猫眼安装,并经过开机检测后,确保检测无误再开启手轮,对光斑位置进行调整,确保其处于传感器中心,通过螺旋微动平台的控制,使猫眼沿直线导轨进行匀速移动,同时追踪系统对猫眼移动进行实时跟踪,当光斑位置再次移动对传感器中心,则可停止追踪,对控制系统的追踪时间进行记录。通过相关试验结果可以发现:在猫眼移动过程中,追踪系统进行自动追踪,并对光斑进行控制,使其回到传感器中心的平均时间为0.259 ms,方差为σ2=3×10-7。
4 结束语
为了使目标靶镜的精密追踪测量得以实现,就基于激光追踪测量原理的激光追踪电气控制系统加强研究,通过PMAC控制器对伺服进行有效控制,并对PID前馈控制加强调节,使电机闭环控制得以实现,电机响应速度提高,从而对系统平稳运行予以保障。另外利用四象限光电传感器进行相关激光追踪测量试验,通过试验可以看出,此测量系统具有追踪速度较快的优点,并且能够对猫眼移动实现实时追踪,并且能够确保整个运行过程的平稳性。
参考文献
[1] 孙衍强,陈洪芳,石照耀,等.基于ESO-CPC的激光追踪测量系统电机仿真方法[J].哈尔滨工程大学学报,2020,41(2):235-242.
[2] 王巍,周天一,王诚鑫.基于激光跟踪仪测量系统的翼身对接技术研究[J].装备制造技术,2018(10):209-212,226.
[3] 姜博.激光追踪多站位测量技术的应用研究[D].北京:北京工业大学,2019.
[4] 陈洪芳,孙衍强,王亚韦,等.高精度激光追踪测量方法及实验研究[J].中国激光,2018,45(1):160-167.
猜你喜欢
中国科技纵横(2016年20期)2016-12-28
电子技术与软件工程(2016年22期)2016-12-26