机器人辅助脊柱手术三维定位导航
2020-03-04 01:06张峰峰陈龙杨诗怡于凌涛干旻峰詹蔚孙立宁
哈尔滨工程大学学报 2020年12期
张峰峰,陈龙,杨诗怡,于凌涛,干旻峰,詹蔚,孙立宁
(1.苏州大学 机电工程学院,江苏 苏州 215006;2.苏州大学 苏州纳米科技协同创新中心,江苏 苏州 215123;3.哈尔滨工程大学 机电工程学院,黑龙江 哈尔滨 150001;4.苏州大学 附属第一医院,江苏 苏州 215000)
传统的脊柱手术需要暴露患者的脊柱或通过基于术中X光图像的手术导航来实现标记点的放置,给患者的心理和身体带来了痛苦[1-3]。目前随着医学影像、光学追踪及机器人辅助手术技术的快速发展,传统的手术导航技术已经明显不能适应时代的需求。凭借术前病人的脊柱CT与术中病人脊柱的X光图来完成三维图像和二维图像的实时配准来定位病灶点的位置。这一技术虽然可以帮助医生实现微创手术,但由于术中引入X光图来进行手术导航,无疑是给医生和患者增加了被辐射的风险,对患者造成二次伤害。目前许多研究引入机器人辅助三维导航系统进行病灶点位置的精确定位及手术路径的规划,在临床上具有长远的意义[4-6],但仍然没有彻底解决术中病人和医生的辐射问题。因此,如何能够降低或消除辐射对病人的影响成了目前手术导航研究领域的一大热点[7]。三维结构光技术主要指通过投影仪投射特定的光学图案到被测物体表面,由相机对其进行信息采集,最终实现对被测物体的表面三维重建。三维结构光技术经过这些年的发展,在生物医学工程领域逐渐崭露头角[8-10]。随着图像引导手术导航和三维结构光技术的快速发展,未来将三维结构光技术用于术中病人脊柱表面信息的采集,可能会成为一种趋势[11]。相比于利用X光机对病人术中脊柱拍摄X光图,基于三维结构光技术的病人脊柱表面信息的采集则是在完全无辐射的情况下进行,同时具有高效率和高精度的特点。在术中通过结构光扫描仪扫描脊柱来实时提供脊柱表面三维重建图像。与术前CT图像进行实时配准的基础之上,融合了光学跟踪设备进行实时获取手术器械和患者的病灶点之间的相对位置关系,使其能够实时显示在可视化的三维空间软件中[12-15]。医生可以在三维导航软件上进行脊柱病灶点的三维可视化观察,同时可以进行手术路径的规划,能够更精确的定位和切除病灶点[16-20]。
本文设计了机器人辅助脊柱手术的三维定位导航系统并进设计了脊柱穿刺定位实验。利用结构光图像代替术中X光图像,同时在CT和结构光扫描的图像的基础之上,进行三维手术导航系统的软、硬件模块的深入研究。对基于三维结构光扫描的脊柱三维重建图像的精度以及术前CT和术中结构光图像的配准精度进行定量分析,同时进行各个模块的坐标转换关系分析,将规划的路径坐标传送给机器人实现手术路径的规划和病灶点的精确定位。最后设计穿刺定位位置和姿态实验来验证机器人辅助的三维导航系统精度。
1 机器人辅助脊柱手术三维导航系统
1.1 硬件组成
整个三维机器人辅助导航系统主要由以下硬件组成:结构光扫描仪、脊柱模型、工作站、机器人、可编程逻辑控制器(programmable logic controller,PLC)(s7-200)、显示器、手术台和NDI光学跟踪器,如图1所示。其中NDI光学跟踪器主要获取手术器械、患者病灶点、结构光扫描仪等之间的相对位置关系。三维结构光扫描仪主要用于拍取实验过程中脊柱模型图像,能够实时重建脊柱表面的三维信息,为实验过程中的配准环节做准备。机器人主要用于代替人手完成脊柱模型病灶点的穿刺,减小人为操作存在的随机误差。为了方便实验和更真实的模拟实际的手术环境,选取部分脊柱模型喷上白漆标记作为实验操作的对象,将不属于脊柱部分的尾骨去除。

图1 脊柱手术三维导航系统的硬件组成Fig.1 Hardware composition of three-dimensional navigation system for spinal surgery
1.2 软件组成
在基于MFC的基础之上融合了VTK、ITK可视化软件安装包,用Visual studio 2010编写了脊柱手术的三维手术导航系统软件的操作界面。手术路径规划模块、三维重建模块以及3D-3D配准模块构成了三维导航系统的软件部分。
1.2.1 术前CT和术中基于结构光扫描的脊柱三维重建模块
基于术前CT的脊柱模型三维重建的流程如下:首先,在实验前通过CT机对脊柱模型进行拍摄,将CT切片导入工作站。然后,通过VTK软件包读取CT切片的相关信息。最后分别采用体绘制和面绘制的方法对脊柱模型进行三维重建。具体基于CT的术前脊柱模型三维重建的效果如图2(a)所示。
基于术中三维结构光扫描的脊柱模型三维重建流程为:1)通过三维结构光扫描仪的投影仪向脊柱模型投射编码图案;2)通过双目结构光相机进行脊柱表面信息的采集,传入到工作站,进行解码;3)将得到的脊柱表面三维点云信息显示在显示器中。具体的基于结构光三维重建效果如图2(b)所示。
1.2.2 3D-3D配准模块
首先通过三维重建模块投射一定的初始配准参数,将术前拍摄的脊柱模型的CT切片进行三维重建。然后通过结构光扫描仪对术中脊柱进行实时扫描,进行脊柱表面的点云信息采集,在此基础之上,进行基于VTK的点云数据的三维曲面重建。最后将基于结构光的术中脊柱三维曲面与术前CT重建的脊柱模型图像进行相似性测度值计算,设定一个相似性测度值,当二者的配准结果不满足相似性测度值时,再调整初始的配准参数,使其能够满足相似性测度的要求。具体配准流程如图3所示。

图2 脊柱模型的三维重建效果Fig.2 The effect of three-dimensional reconstruction of spinal model

图3 3D-3D图像配准的流程Fig.3 3D-3D image registration process
1.2.3 脊柱手术的路径规划模块
运行三维手术导航系统软件,根据预先的设置规划脊柱手术路径。通过3D-3D的配准模块所获得的参数将预先规划好的手术路径的两端坐标转换到三维结构光光扫描仪的坐标系中。根据三维结构光扫描仪到星状刚体的标定和校准参数,使其从三维结构光扫描仪坐标系转换到星状刚体坐标系中。使用NDI光学跟踪器实时获取脊柱模型上的被动刚体和机器人末端手术器械上的被动刚体之间位姿关系。同时实时获取脊柱模型和星状刚体之间的相对位姿。通过一系列转换,可以将术前规划的手术路径的坐标转换到机器人坐标系,从而进一步控制机器人按照既定的路线进行手术穿刺。
2 三维导航系统各模块之间的坐标转换关系分析
在光学扫描仪上安装1个星状的刚体,刚体内嵌有红外发射二极管。通过NDI光学跟踪定位系统对星状刚体进行标定和识别,实时建立刚体的位置和方位。通过1个校准过程确定结构光扫描仪到星状刚体的转换,只要星形发射器保持固定在结构光扫描仪的相同位置,这种转换就保持不变。
(1)
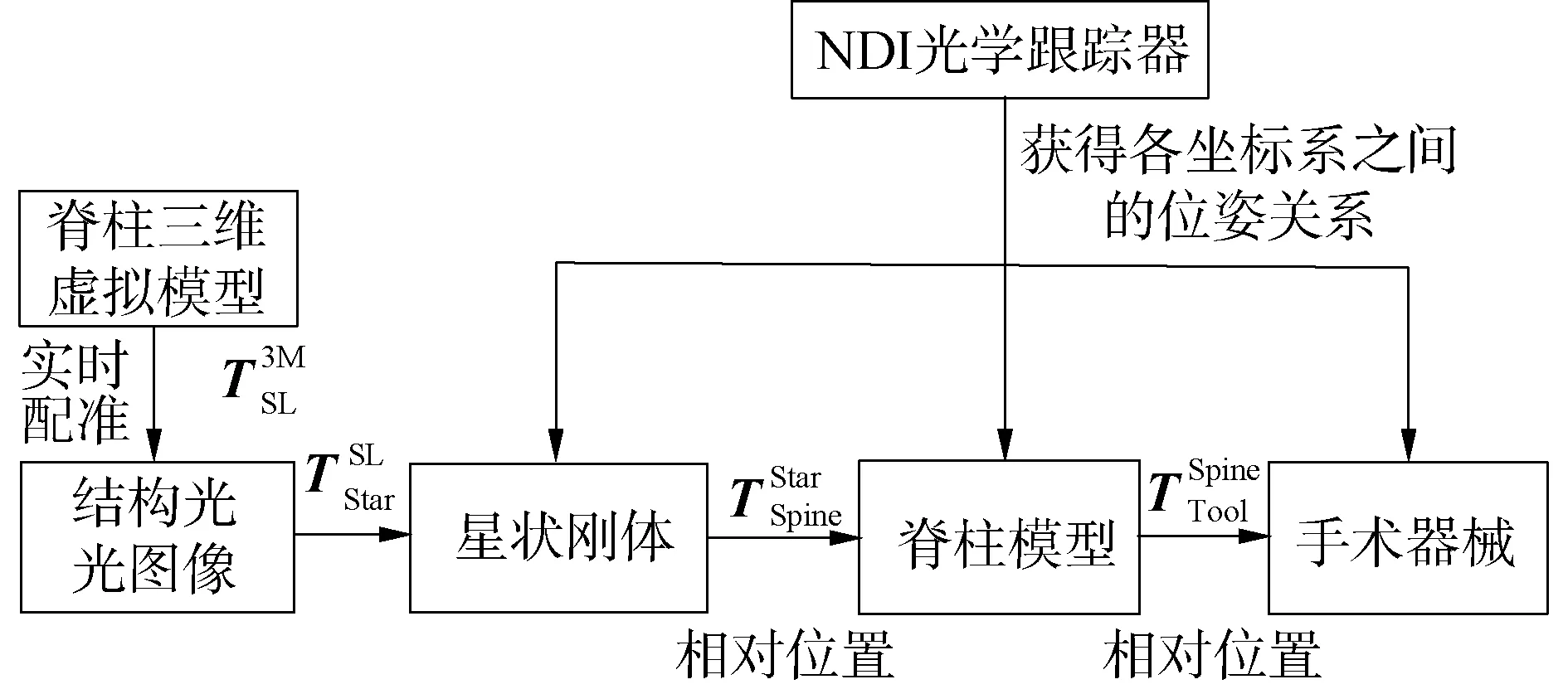
图4 脊柱手术导航系统的坐标转换关系Fig.4 Coordinate transformation relationship of spinal surgical navigation system
3 脊柱定位位置和姿态的实验和结果
通过设计导航定位位置和姿态的实验验证机器人辅助脊柱手术的三维导航系统精度。根据坐标系之间的转换原理,首先完成脊柱模型的CT三维重建以及术中结构光扫描仪实时扫描,对结构光实时扫描得到的脊柱模型三维重建表面的精度进行误差定量分析。再进行CT重建后的图像与结构光扫描重建后的图像进行3D-3D图像的配准,同时对二者之间的配准误差进行定量分析。最终将术前规划好的手术路径转换到机器人坐标系中,通过PLC控制机器人运动到规划的位置。通过对机器人实际穿刺的位置与理论位置之间进行插值计算,进一步得到定位位置和姿态的精度误差。
3.1 基于结构光扫描的脊柱模型表面三维重建实验
通过结构光扫描仪对术中脊柱表面进行实时扫描,获得脊柱表面实时三维点云信息。在基于VTK软件包的基础之上,对三维点云数据进行实时曲面重建。将脊柱三维重建曲面模型导入Geomagic studio软件中,对其三维曲面重建精度进行分析,得到的误差如图5所示。整个脊柱三维曲面重建精度的标准偏差(standard deviation,SD)为0.123 9 mm,均方根估计值为0.124 1 mm。
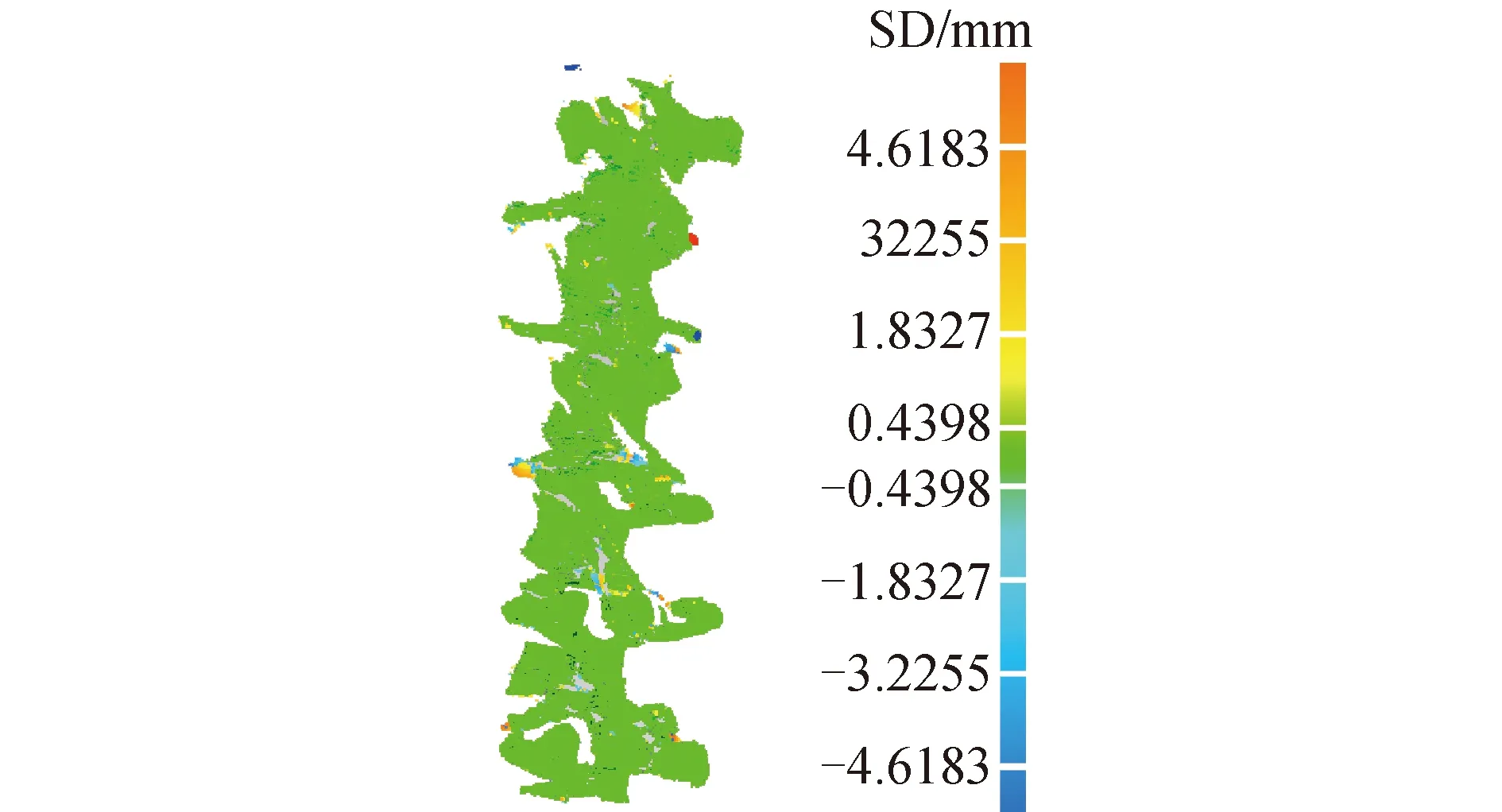
图5 基于结构光扫描的脊柱曲面三维重建误差分析Fig.5 Error analysis of 3D reconstruction of spinal surface based on structured light scanning
3.2 3D-3D图像配准实验
将术前脊柱模型的CT切片进行三维重建,同时在术中采用结构光扫描仪对脊柱表面实时扫描,以此获取脊柱表面三维图像。利用基于脊柱外部点、面信息,将结构光扫描仪三维重建的脊柱表面信息与CT图像数据进行配准。使用Horn的四元数方法解决奇异值分解,使用Besl和McKay提出的迭代最近点算法进行基于脊柱表面的配准,并且使用k-d维树来减少配准的搜索时间。对2者的配准精度进行验证,得到的误差如图6所示。在实验过程中,选取200 mm长的脊柱白色段作为实验对象,最终2者配准的标准偏差为2.835 6 mm,均方根估计值为2.832 8 mm。

图6 脊柱模型3D-3D配准误差分析Fig.6 Analysis of 3D-3D registration error in spinal model
3.3 机器人辅助导航定位位置实验
在脊柱模型上打孔并插入4个螺钉,通过PLC控制机器人到达规划的位置。凭借螺钉进行路径的姿态规划,利用小孔进行路径规划时的定位。对理论位置的坐标和实际位置的坐标进行测量并进行差值计算。
对打孔后的脊柱模型重新拍摄CT图像进行三维重建。任选模型上的2 点规划4条手术路径,进行A、B、C、D组定位位置的实验。利用机器人夹持手术器械到达指定的位姿,通过NDI光学跟踪系统实时读取探针的被动刚体选取的点的实际和理论位置的坐标。除此以外仍需将探针尖点的坐标从探针被动刚体坐标系转换到NDI坐标系下。具体的4组实验结果如表1所示,实验数据可以得出:本研究中所提出的机器人辅助脊柱手术导航系统的定位位置平均精度误差和最小精度误差分别为3.34 mm和3.23 mm。
如图7所示对小孔位置进行定位实验。如表1所示,利用NDI对探针被动刚体的位姿数据进行读取。

图7 机器人辅助导航定位位置Fig.7 Robot-assisted navigation and location
3.4 机器人辅助导航位姿定位实验
以螺钉中轴线作为基准,规划术前的手术路径。对实际的位姿和理论上的位姿的坐标进行测量,计算坐标之间的差值。分别选取螺钉和手术器械上平行于基准的2点,通过NDI读取探针末端所取的点的坐标。分别通过在螺钉和手术器械上寻找2点构建测量向量,将螺钉2点之间的构建的向量命名为向量α,将手术器械上2点之间的向量命名为向量β。机器人辅助定位位姿的误差主要通过向量α和β的夹角的测量来计算。在脊柱上任选2组螺钉,每组螺钉分别进行2种不同的手术路径的规划。
1)选取如图8所示位置的螺钉,规划2条不同的手术路径。第1组导航定位位姿的实验,所获的具体实验数据如表2所示。
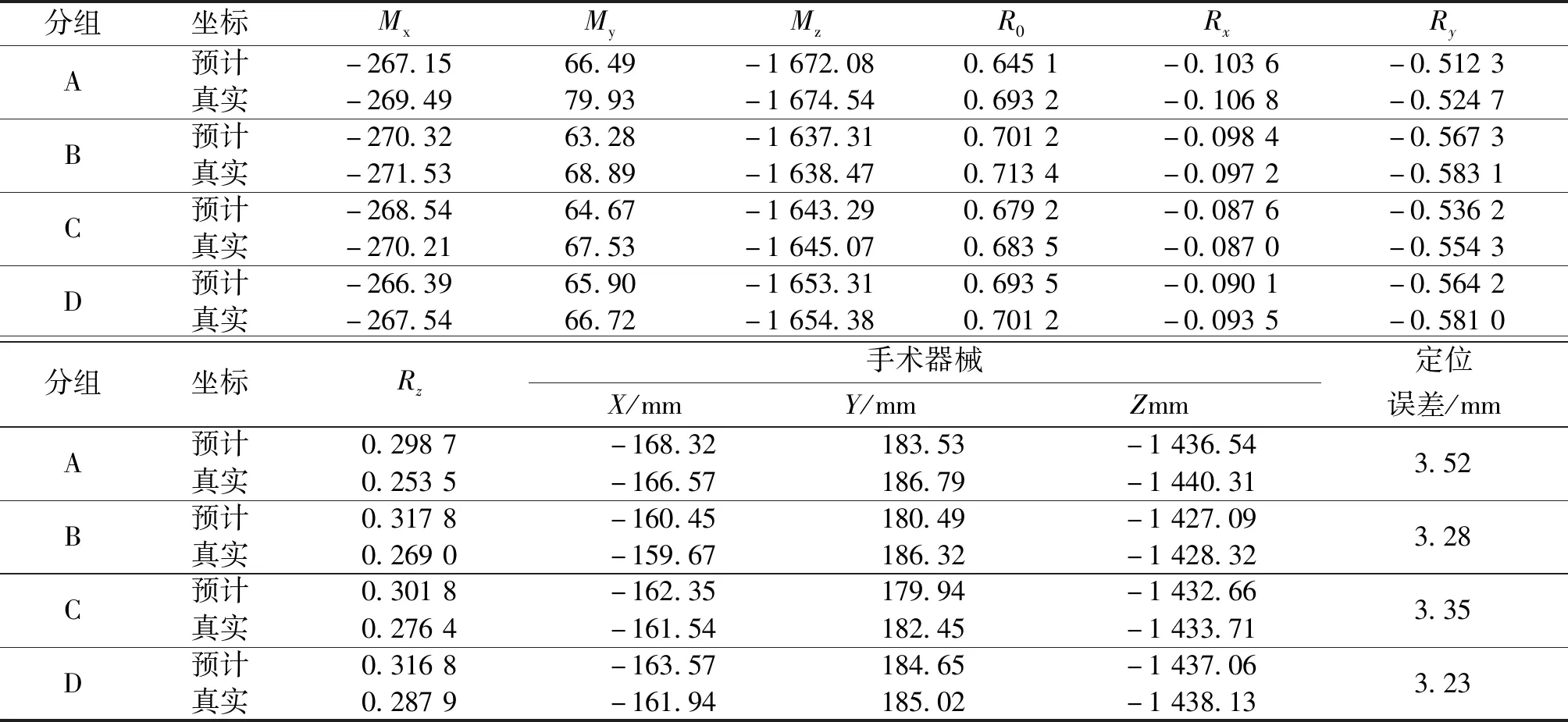
表1 机器人辅助导航定位位置的实验误差Table 1 Experimental errors of robot-assisted navigation and location

表2 第1组定位导航姿态实验的误差Table 2 Error of the first group of positioning and navigation attitude experiments

图8 第1组机器人辅助导航定位位姿Fig.8 The first group of robot-assisted navigation positioning posture
2)换位置,选取如图9所示位置的螺钉,规划2条不同的手术路径。第2组机器人辅助导航定位位姿的实验,所获的具体实验数据如表3所示。

图9 第2组机器人辅助导航定位位姿Fig.9 The second group of robot-assisted navigation positioning posture
按照上述的实验步骤,选取2组不同位置的螺钉,共进行了A、B、C、D共4组实验。通过4组实验的实验数据可以看出本研究所提出的机器人辅助导航定位位姿的平均精度为3.10°,最小精度误差为1.92°。从实验结果可以看出,定位导航的位姿基本满足医生临床手术的需要。

表3 第2组定位导航姿态实验的误差Table 3 Error of the second group of positioning and navigation attitude experiments
4 结论
1)本文提出了术中结构光图像与术前CT图像三维配准的方法,降低了人为操作误差对脊柱穿刺手术的影响。同时利用结构光图像代替传统的X光图,与术前CT图像进行配准可以解决术中辐射过量问题。从实验数据可以看出,该三维脊柱穿刺手术导航系统的定位位置的误差为3.34±0.12 mm,其定位导航姿态的误差为3.1±0.89°,基本可以满足脊柱穿刺手术导航的基本需求。
2)该导航系统仍然存在一定的误差。主要原因可能在于该导航系统的整体流程环节过多,导致每个环节的误差积累,最终形成较大的误差。
在今后的研究中,可以从下面3个方向进行着重研究:对导航系统的各个环节进行深入研究,力求减少导航系统的环节,简化手术导航系统的流程,降低各环节误差的累积;3D-3D配准的算法进行优化,同时减少配准时间,提高配准精度;目前该研究的对象为脊柱的裸骨模型,在未来可能进行动物或尸体实验的研究来进一步对该导航系统的精度进行验证。
猜你喜欢
现代仪器与医疗(2022年2期)2022-08-11
北京航空航天大学学报(2021年6期)2021-07-20
中华养生保健(2020年7期)2020-11-16
现代信息科技(2020年22期)2020-06-24
浙江海洋大学学报(自然科学版)(2020年5期)2020-06-19
软件(2020年3期)2020-04-20
模具制造(2019年3期)2019-06-06
电子技术与软件工程(2019年6期)2019-04-26
科技与创新(2018年12期)2018-06-22
腹腔镜外科杂志(2016年12期)2016-06-01