
一种K波段FMCW测距雷达设计
2020-03-08 00:14韩俊辉周浩郝邵杰葛新灵
装备维修技术 2020年19期
关键词:信号处理
韩俊辉 周浩 郝邵杰 葛新灵

摘要:针对无人机避障和测高需求,设计了一种K波段FMCW测距雷达。雷达采用高集成度的24GHz频段雷达芯片设计方案,实现测距雷达的低成本、低功耗以及小型化设计。针对VCO输出频率与调谐电压的非线性问题,进行了VCO线性校正。采用FPGA+ADC的采集电路设计方案实现数据采集、综合控制以及信号处理功能,实现了测距雷达对目标物距离和速度等信息的提取。实验结果表明该雷达测量范围和测量精度符合设计指标,且运行稳定可靠,满足使用要求。
关键词:线性调频连续波;测距雷达;信号处理;VCO非线性校正
1 引言
毫米波雷达探测具有全天时、全天候以及抗干扰能力强的特点,大量使用在军事目标的探测。随着电子技术发展,特别是单片微波集成电路(MMIC)的迅速发展,毫米波雷达向小体积、轻重量和低成本方向发展,使得毫米波雷达逐渐在工业和民用领域中广泛使用[1]。其中调频连续波(FMCW)雷达具有高灵敏度、高距离分辨率、高可靠性和体积小的优势,近年来在汽车防撞、智能驾驶、智能交通以及无人机避障等领域发展迅速,成为当前研究的重点和热点[2-5]。
当下无人飞行器的研究与应用方兴未艾,如无人机避障,无人机农作物喷药,无人机电力传输线巡检等均需要对障碍物或目标物进行探测。常用的探测方式包括激光探测、可见光探测、红外探测和毫米波探测等,可见光探测和红外探测对环境比较敏感抗高干扰能力较差,激光探测则体积较大而难以搭载,毫米波探测以其全天时、全天候以及抗干扰能力强的优点成为无人机目标探测的上佳选择[6-7]。本文针对某无人机避障和测高的应用需求,开发设计一种K波段FMCW测距雷达。文中给出了雷达系统的整体设计方案,详细介绍了射频部分电路设计,VCO线性校正和数字信号处理的流程,并对该雷达系统进行了测试。
2 FMCW测距雷达工作原理
FMCM雷达工作的基本原理是:雷达产生一系列连续调频连续波,通过天线向外辐射;接收端接收目标反射回来的信号并与发射信号进行混频,根据混频后信号的频率来实现对目标距离和速度的测量。常用的调制信号波形有正弦波、三角波和锯齿波[1]。本文FMCW测距雷达系统的调制信号为三角波。
如图1(a)所示,FMCW雷达发射信号和接收信号的瞬时频率与时间的变化的波形為三角波,实线表示雷达发射信号瞬时频率与时间的关系,虚线表示回波信号瞬时频率与时间的关系,频率变化范围为ΔF,调制周期为T。反射信号和发射信号形状相同,只是在时间上有一个延迟,两者混频产生中频信号IF,如图1(b)所示。设待测目标距离为R,电波速度为c,则被测目标距离的计算公式为:
由公式(1)可知,在频率变化范围ΔF和调制周期T确定的情况下,目标距离R仅跟中频信号IF有关,得到IF即可得到目标的距离信息。
3 FMCW测距雷达设计
3.1 系统方案设计
本文设计开发的测距雷达主要应用于无人机的避障和测高,由于无人机载重和续航的要求,该雷达系统必须要求低功耗和小型化。同时相对于目前常用的红外测距或可见光测距,成本上也需要具有一定的竞争力。基于雷达系统低成本、低功耗和小型化的设计要求,本文采用零中频接收机的设计思路,直接将接收信号与发射信号同频的本振信号进行混频,得到中频信号。相对于超外差接收机,减少了大量的混频、本振源以及滤波器等电路,结构更为简洁,具有小体积、轻重量、低功耗和低成本等优势。
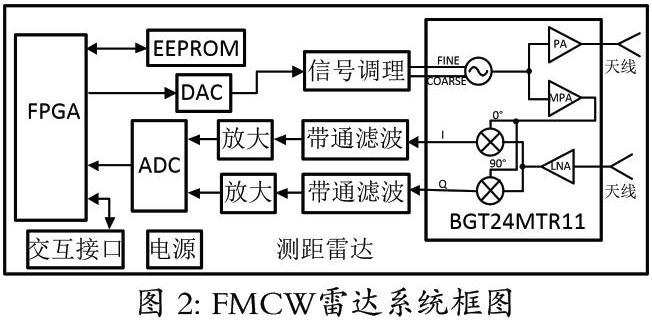
雷达系统整体设计方案如图2所示,FPGA实现雷达系统的信号处理和控制;DAC实现调制信号产生;BGT24MTR11实现调制信号的产生,信号发射、信号接收和混频,产生两路正交的I、Q基带信号;天线实现信号的发射和接收;中频信号经过带通滤波和放大,采用ADC进行中频信号的采集。此外,EPROM实现系统数据存储功能,交互接口实现雷达系统数据交互,电源实现系统的供电。
3.2 射频部分电路设计
雷达射频前端选用英飞凌公司的24GHz单芯片雷达收发器BGT24MTR11。如图3所示,它将低相位噪声的压控振荡器、分频器、差分正交混频器、单端射频、低噪声放大器以及温度传感器等集成到单片芯片,采用业界标准的QFN封装,大大减少外部匹配组件和射频传输链路所占用的空间,可满足系统小型化、低功耗和低成本的设计要求[8]。
由图3可以看出,BGT24MTR11内部集成的VCO,并由FINE和COARSE两个调谐管脚控制,可产生24GHz-26GHz的射频信号。射频信号经过器件内部的放大器功率放大,以差分的形式进行输出,输出功率最高可达15dBm。输入的射频信号经内部的LNA放大后进入差分正交混频器,与VCO产生的信号进行混频,获得两路正交的中频信号,且两路中频信号都是差分输出。FPGA可通过SPI接口控制BGT24MTR11内部16位寄存器,实现内部LNA、放大器、分频器等模块的控制,使用灵活。
由于BGT24MTR11射频输出为差分信号,为了便于天线发射,需要将差分信号转换为单端信号,本文采用合路器将两路差分信号合成一路进行输出,同时由于差分信号中两路信号是正交的,在其中一路利用微带线调整相位后再进行功率合成,如图4所示。
其中,合路器的仿真结果为:在24GHz频点时,S21和S31均在-3.08dB,S11在-21.8dB,S22在-27.1dB,且在雷达使用频率范围内(24GHz~25.5GHz)均满足系统的使用要求。
3.3 VCO调制曲线校正
采用DAC生成压控振荡器的调谐电压的设计方案,电路实现简洁,数字直接合成调谐电压,控制灵活快捷。但由于VCO内部变容二极管固有的非线性,使得VCO的调谐电压和输出频率并不是线性关系[9]。图5为BGT24MTR11内置VCO输出频率与调谐电压的曲线图[8],随着调谐电压线性变化VCO输出频率并不是线性增加的。参考图1和公式(1),当发射信号和接收信号非线性时,最终得到中频信号准确度会变差,进而影响FMCW雷达测距结果的准确度。
常用的VCO线性校正方法包括开环校正法、闭环和软件校正法。其中闭环校正需要采用锁相环的思路设计新的测试电路,软件校正方法校正精度不高,而开环校正法可以直接采用本文设计的雷达系统硬件进行[9],所以采用开环校正法进行VCO的线性校正。
本文VCO线性校正系统由计算机、测距雷达和频谱仪组成,系统校正过程如下:1)如图2,FPGA控制DAC产生线性三角波形的调谐电压,通过频谱仪测试雷达系统的发射信号的频率值,计算机实现整个系统的测试控制,最终得到BGT24MTR11内部VCO的频率和调谐电压变化的特征曲线。2)为提高系统测试的精度,在DAC位数满足的情况下,尽可能增加测试点数;同时采用多次测量求取平均值的方式,减少测试的误差。3)根据雷达系统调频的范围和斜率,在测试数据中挑选相应的数据存放至雷达系统存储器中,并通过FGPA控制DAC进行播放。利用图7系统继续进行测试校正,往复循环直至得到线性的调制波形。
校正后结果如图6所示。针对VCO不同频率下调谐电压和输出频率特性的不同,可利用上述方法测试不同溫度下的电压-频率数据。
3.4 数字信号处理流程
本文雷达系统数字信号处理基于FPGA实现,主要包括综合控制、信号采集、数字信号处理、交互接口通信等四部分。雷达系统整体流程如图7所示:系统上电后,进行系统硬件的初始化和系统自检。自检无异常后,系统开始进行工作,FPGA控制DAC实现VCO三角调制波控制电压的产生。为防止近距离目标时,大的反射信号使低噪声放大器或中频放大器过载而影响测量结果,FPGA根据检测到的信号幅度进行通道的自动增益控制,以实现系统性能最优。之后,FPGA通过ADC实现中频信号的采集,将模拟的中频信号数字化,方便后续的数字信号处理。中频信号经量化后,再进行数字滤波和数据加窗处理,之后进行FFT得到中频信号的频域信息。为保证系统在杂波边缘环境中获得较好的控制虚警性能,采用GO-CFAR处理算法进行恒虚警检测[10]。最后得到目标的距离信息,并通过交互接口将目标信息上传。
4 雷达系统测试
为验证雷达系统性能,在暗室环境下搭建测试系统进行验证。测试结果如图8所示,测试目标对应的中频频率为61.04KHz。雷达扫频带宽为100MHz,扫描周期为200μs,根据公式(1)可计算出测试目标的距离为9.156m。
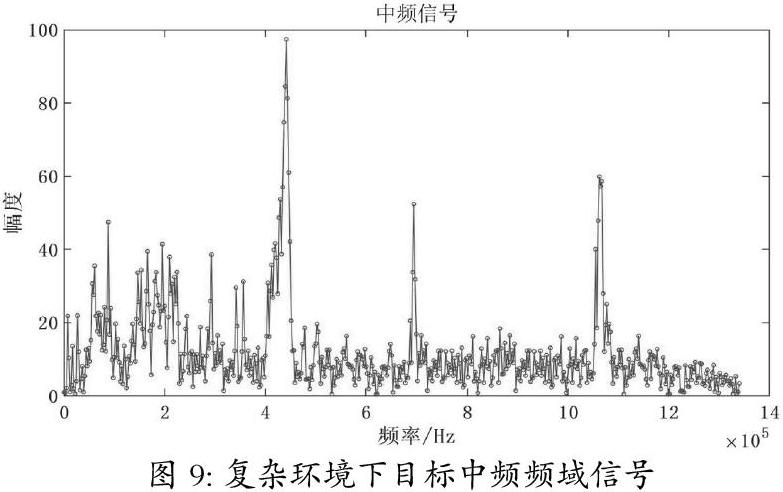
为验证雷达系统在复杂环境下的测试效果和性能,本文在室外环境进了测试。测试结果如图9所示,幅度最大的441.9KHz信号为被测目标1对应的中频信号,根据公式(1)可计算出被测目标距离为66.285m,频点693.4KHz为被测目标2对应的中频信号,根据公式(1)可计算出被测目标距离为104.01m,利用激光测距仪测试被测目标1的距离约66m,被测目标2的距离约103m。图中其他频点则对应了环境中其他物体的反射信号。根据对比测试结果,设计的测距雷达到设计要求。
5 结论
本文针对无人机避障和测高应用需求,设计开发了一种k波段FMCW测距雷达。该雷达具有探测距离远,探测精度高,体积小,功耗低的特点,具有较好的工程应用价值。由于本系统只采用了单斜率的三角波的调制波形,在运动过程中的多目标探测,存在多普勒模糊问题。后续在实际应用中,还需要考虑选择合适调频序列来满足多目标的探测需求。
参考文献:
[1]丁鹭飞,耿富录等,雷达原理[M] ,北京: 电子工业出版社, 2009.
[2]王元凯,肖泽龙,徐建中,吴礼,一种改进的FMCW雷达线性调频序列波形[J] ,电子学报,2017, 45(6):1288-1293.
[3]袁欣,徐杜,基于毫米波雷达的汽车近程防撞系统[J] ,信息通信,2018, 3:93-96.
[4]王俊喜,司伟健,周烔赛,毫米波汽车防撞雷达多目标识别算法仿真[J] ,应用科技,2015, 42(6):52-57.
[5]郑世良,车载毫米波雷达关键技术研究[D] ,哈尔滨工业大学,2017.
[6]高迪,无人机避障雷达目标探测与跟踪算法研究[D] ,哈尔滨工业大学,2017.
[7]于寿鹏,周志权,赵占锋,无人机毫米波防撞雷达系统设计[J] ,无线互联科技,2018, 16:20-23.
[ 8 ] Infineon, BGT24MTR11 silicon germanium 24 GHz transceiver MMIC ,Data sheet,2014.
[9]肖玮,涂亚庆,李先利,VCO扫频非线性校正技术综述[J] ,电测与仪表,2009, 46(528):33-38.
[10]孙元,孙梧雨,韦家军,廖鹏,恒虚警的汽车主动防撞毫米波雷达信号处理算法[J] ,兵工自动化,2017,36(9):45-49.
(中国电子科技集团公司第41研究所,山东 青岛 266555)
猜你喜欢
中国新通信(2016年21期)2017-01-06
科技视界(2016年20期)2016-09-29
电脑知识与技术(2016年3期)2016-04-07
计算技术与自动化(2015年4期)2016-03-25
中国市场(2016年6期)2016-03-07
无线互联科技(2015年11期)2016-03-04
电子技术与软件工程(2015年6期)2015-04-20
电子世界(2004年6期)2004-07-27
