
多弹性支承-轴向运动导纱梳栉的振动模型
2020-03-10 08:28苏柳元王亚诚葛晓逸张玉井
纺织学报 2020年2期
苏柳元, 孟 婥, 王亚诚, 葛晓逸, 张玉井
(1. 东华大学 机械工程学院, 上海 201620; 2. 福建屹立智能化科技有限公司, 福建 莆田 351146)
经编机导纱梳栉由于振动引起弯曲变形会造成导纱针与舌针摩擦,阻碍了经编机向高速化发展,因此需对其动力学特性开展研究。导纱梳栉具有横截面小、长度长、多支承和高速往复轴向运动的特点,可将其等效为连续梁结构进行动力学特性研究。连续梁结构广泛应用于航天航空、机械工程和土木建筑等领域,其振动模型是研究桥梁、管道和导弹弹道等动力学问题的关键。对于中间支承较多的连续梁,其弯曲振动问题复杂,在分析中大都采用能量法、迭代法和传递矩阵法等进行近似计算。Yesilce等[1]采用割线法对带有弹簧质量系统的多跨铁木辛柯梁进行了振动分析;叶茂等[2]分析了中间弹性支承、变刚度和密度的阶梯梁的模态振型;Johansson 等[3]基于拉普拉斯传递矩阵法研究了连续阶梯梁在恒速运动载荷下的振动;刘向尧等[4]基于传递矩阵法研究了复杂边界条件下多跨梁的振动。这些研究均为多支承导纱梳栉的振动分析提供参考。
一些轴向运动的工程原件,如缆车索道、传送带、带锯和炮筒等,其固有频率和振型受到速度和加速度的严重影响,不能简单地等效为静态梁模型。因此,采用动态梁理论建立导纱梳栉的振动模型,研究轴向速度和加速度对其固有频率的影响。Yang 等[5]采用假设参数法获得了轴向运动梁在不同边界条件下的固有频率;Lv 等[6]采用多尺度法研究了轴向加速黏弹性三明治梁在时变张力情况下的非线性参数共振和内部张力对其固有频率和轴向振幅的影响;Park等[7]采用伽辽金法分析了中间弹性支承轴向运动有限长度梁的横向振动并研究了弹簧位置和刚度对其固有频率和振型的影响。这些研究方法为多支承-轴向运动导纱梳栉的振动分析提供了参考。
以上提到的文献主要针对简单边界条件(固定和铰接)和简单运动规律下的梁振动研究。在实际工程应用中对于具有复杂边界条件和确定运动规律的梁振动研究较少。本文基于连续梁理论,考虑导纱梳栉的形状、材料、支承形式和运动规律,对其固有频率和振型进行了研究,为减小导纱梳栉的弯曲振动和优化经编机的横移系统提供参考。
1 梳栉横移系统结构特性
梳栉横移系统由伺服电动机、滚珠丝杠副、球铰、钢丝绳、导纱梳栉和导向元件组成,其结构原理如图1 所示。伺服电动机驱动滚珠丝杠,通过球铰将导纱梳栉推出,再通过钢丝绳拉回。由于导纱梳栉跨距过长,需采用6对滚珠导套支承和导向。

图1 梳栉横移系统结构原理图Fig.1 Structural schematic diagram of guide bar shogging system
导纱梳栉具有以下特点:
1)每段梳栉的长度与其截面高度之比大于10,满足梁条件。
2)一对滚珠导套可等效为2个并联的弹簧;滚珠导套的长度远小于导纱梳栉的长度,滚珠导套可等效为集中支承的弹簧。
3)梳栉横移距离相对于梳栉总长可忽略;横移时间很短,可采用静态和动态梁理论对其进行振动分析。
综上得知,导纱梳栉可等效为两端自由、受轴向力、多弹性支承的连续梁结构,其主要振动形式为弯曲振动,可以基于静态和动态梁振动理论进行研究。
2 静态情况下导纱梳栉的振动
2.1 多弹性支承静态梁的振动模型
根据能量法和拉普拉斯变换得静态梁的自由振动方程如式(1)所示。梁长度为L,密度为ρ,弹性模量为E,截面惯性矩为I,横截面积为A,受轴向力P作用。
(1)
式(1)中,系数A、B、C、D由边界条件和连续性条件决定。
(2)
式(2)中,
(3)
式中,w为角频率。
图2示出由n个弹性支承、两端自由且受轴向力P作用的梁。

图2 多弹性支承梁Fig.2 Elastically-supported beam
假设每段梁的模态方程为
(4)
梁两端的转矩和剪切力都为0,边界条件为
(5)
λ22Dn+1coshλ2Ln+1=0
λ13Bn+1sinλ1Ln+1+λ23Cn+1coshλ2Ln+1+
λ23Dn+1sinhλ2Ln+1=0
由位移、转角、弯矩、剪力的协调条件[8]得到连续性条件如式(6)所示,Kk为第k个支承的刚度。
(6)
KkYk+1(0)
k=1,2,3,…,n
结合式(5)和式(6),得出
[T]·{A}=0
(7)
式中:{A}=[A1,B1,C1,D1,A2,B2,C2,D2,A3,B3,C3,D3,…,An+1,Bn+1,Cn+1,Dn+1],由于每段模态函数的系数A1,B1,C1,D1,A2,B2,C2,D2,…,An+1,Bn+1,Cn+1,Dn+1,不全为0,则联立方程得到系数矩阵为
|T|4(n+1)×4(n+1)=0
(8)
式(8)是两端自由多弹性支承静态梁在轴向力作用下的特征方程,系数矩阵T满足式(9)。
(9)
式中:符号T(a∶b,c∶d)表示从矩阵T中第a行到第b行和第c列到第d列提取的子矩阵。
梁的模态方程为分段函数,即
(10)
Yn+1(x)[u(x-L1-L2-…-Ln)-
u(x-L)]
2.2 不同材料对导纱梳栉固有频率的影响
以国产某经编机为原型进行研究,其导纱梳栉的结构参数如下:
1)导纱梳栉总长L=3.6 m,横截面积A=9.9×10-4m2。以球铰驱动端为开始端,梳栉每段长度L1~L7分别为0.16、0.6、0.68、0.72、0.65、0.6、0.19 m。
2)导纱梳栉弯曲振动最先发生在截面惯性矩最小的方向,截面惯性矩Iy=4.11×10-8m4。
3)由Hertz接触理论,计算得到滚珠导套径向刚度KS=4.1×104kN/m,即第k个支承刚度为Kk=8.2×104kN/m。
导纱梳栉一般为铝合金、镁铝合金和碳纤维复合材料。对不同材料导纱梳栉的第一阶固有频率进行研究,结果如表1所示。
可知:镁铝合金虽然质量轻,但弹性模量也较低,在相同结构和支承条件下,镁铝合金梳栉的第一阶固有频率与铝合金梳栉差别不大,而采用铝合金材料经济性更好;碳纤维复合材料具有比模量高的特点,碳纤维复合材料梳栉的第一阶固有频率是铝合金和镁铝合金梳栉的2倍以上;对于梳栉数量较多、长度较长和支承较少的特殊经编机,其梳栉可采用碳纤维复合材料。
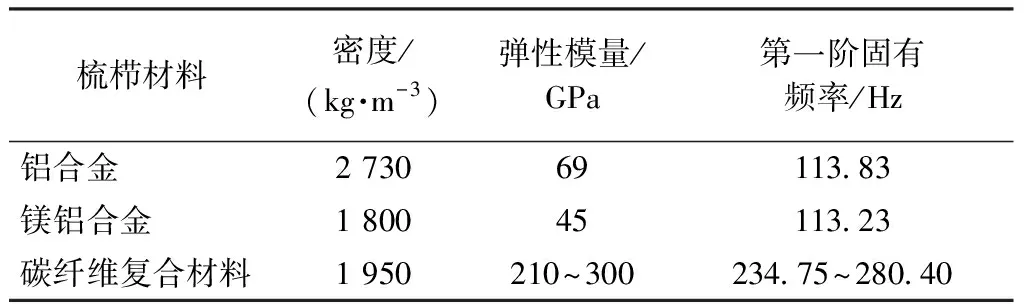
表1 不同材料导纱梳栉的第一阶固有频率Tab.1 First natural frequency of guide bar with different materials
2.3 支承刚度对固有频率和模态振型影响
采用铝合金梳栉,使支承刚度分别为KS=2 000、4 000、8 000、20 000、100 000 kN/m,系统的前三阶固有频率如表2所示。
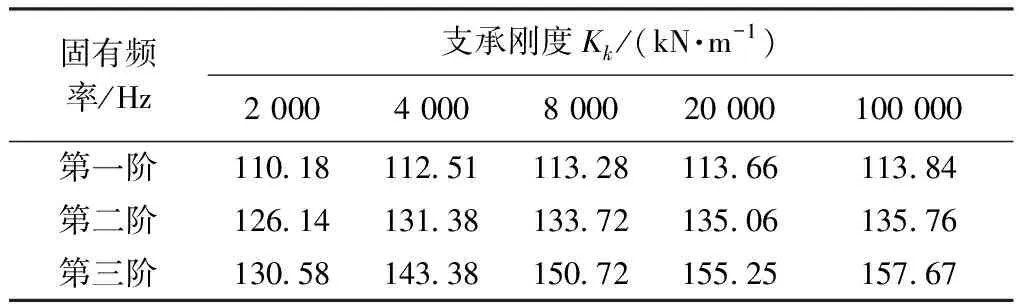
表2 不同支承刚度导纱梳栉的前三阶固有频率Tab.2 First three natural frequencies with different supports stiffness
由表2可知:系统固有频率随着支承刚度的提高而提高,可采用提高支承刚度的方法来提高系统的刚度;当支承刚度Kk≥8 000 kN/m时,支承已接近刚性,随着支承刚度的继续提高,系统固有频率提高的速度减慢,这时应采用其他方法提高梳栉横移系统的刚度。
系统对应的模态振型如图3所示。可知:随着支承刚度的增加,支承位置处弹性变形明显降低,导纱梳栉的振型也随之发生变化;当支承刚度Kk≥8 000 kN/m时,随着支承刚度的继续增加,导纱梳栉的模态振型基本保持不变。

图3 不同支承刚度导纱梳栉的前三阶模态振型Fig.3 First three mode shapes of guide bar with different support stiffness
3 动态情况下导纱梳栉的振动
3.1 多弹性支承轴向运动梁的振动模型
采用能量法和哈密顿定理得轴向运动梁的自由振动方程如式(11)所示,梁的轴向运动速度为v0,其他参数如静态梁。
φ(X)=AeiβAX+BeiβBX+CeiβCX+DeiβDX
(11)
(12)
多弹性支承轴向运动梁模型如图4所示。

图4 轴向运动弹性支承梁模型Fig.4 Model of elastically supported axially moving beam
假设每段梁的模态函数为
φk(Xk)=AkeiβAXk+BkeiβBXk+CkeiβCXk+DkeiβDXk
(13)
梁的自由端剪力和弯矩为0,边界条件为
(14)
连续性条件为
(15)
+KkLφk+1(0)
k=1,2,3,…,n
结合式(14)和式(15)有
[T]{A}=0
(16)
式中:{A}=[A1,B1,C1,D1,A2,B2,C2,D2,A3,B3,C3,D3,…,An+1,Bn+1,Cn+1,Dn+1]T,由于各段梁模态函数的系数不全为0,联立方程组得到的系数矩阵为
|T|4(n+1)×4(n+1)=0
(17)
式(17)是两端自由弹性支承轴向运动梁的特征方程,系数矩阵T满足式(18)。
(18)
T(4k+1∶4k+4,4k-3∶4k+4)=
k=1,2,3,…,n
由式(17)得到角速度w和相应的βj(j=A,B,C,D)。轴向运动导纱梳栉的模态函数如式(19)。
φ(X)=φ1(X)[u(X)-u(X-L1)]+
φ2(X)[u(X-L1)-u(X-L1-L2)]+…+
φn(X)[u(X-L1-L2-…-Ln-1)-
u(X-L1-L2-…-Ln)]+
φn+1(X)[u(X-L1-L2-…-Ln)-u(X-L)]
(19)
3.2 速度、加速度和横移时间对固有频率影响


图5 导纱梳栉第一阶固有频率随轴向速度变化图Fig.5 1st natural frequency vs axial velocity


图6 导纱梳栉第一阶固有频率随轴向加速度变化图Fig.6 1st natural frequency vs axial acceleration
对于梳栉横移系统,由于横移时间很短,导纱梳栉通常采用恒加速和恒减速的运动模式,如图7所示。

图7 恒加速恒减速运动模式Fig.7 Constant-acceleration and constant-deceleration motion mode of guide bar
横移距离S=n×lstitch,lstitch为一个针距,n为横移针距数。轴向运动速度v=S/T,T为横移时间。加速度a=4S/T2。
在确定的经编工艺下,针距和横移针数固定不变,当横移时间减小时,轴向速度和加速度同时增加。针距lstitch为1.058 3 mm,横移针距数n为3,当横移时间从30 ms减少至10 ms时,轴向速度从 0.105 8 m/s增至0.317 5 m/s,加速度从 14.11 m/s2增至127.00 m/s2。第一阶固有频率如图8所示。
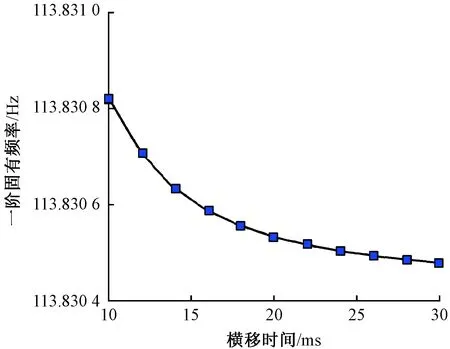
图8 导纱梳栉第一阶固有频率随横移时间变化Fig.8 1st natural frequency vs translation time
由图可知,当横移时间变短时,导纱梳栉的固有频率升高,但升高的幅度很小。由于梳栉横移系统支承数目较多,梳栉和滚珠导套的刚度较高,横移时间对导纱梳栉固有频率的影响很小。因此,在导纱梳栉的振动分析中,可以将其简化为静态梁模型,忽略轴向运动对其振动的影响。
4 结 论
1)针对经编机导纱梳栉横截面小、长度长、多支承和轴向运动的结构特点,基于连续梁理论建立其振动模型。通过能量法获得导纱梳栉的振动方程,通过边界条件和连续性条件获得其特征方程和模态函数。
2)研究不同材料对导纱梳栉振动的影响可知:相同结构和支承条件的铝合金与镁铝合金梳栉第一阶固有频率差别不大,而采用铝合金材料经济性更好;碳纤维复合材料梳栉具有比模量高的特点,其第一阶固有频率是铝合金和镁铝合金梳栉的2倍以上,适用于梳栉数量较多、长度较长和支承较少的特殊经编机;研究不同支承刚度对导纱梳栉振动的影响可知,系统固有频率随着支承刚度的提高而提高,当支承刚度大于8 000 kN/m时,支承已接近刚性,随着支承刚度继续提高,系统固有频率提高的速度减慢,这时应采用其他方法提高梳栉横移系统的固有频率。研究结果为解决导纱梳栉的弯曲振动问题提供参考。
3)速度、加速度和横移时间对导纱梳栉固有频率影响较小,可将其等效为静态梁模型,忽略轴向运动对其振动的影响,为导纱梳栉振动分析条件简化和经编机结构优化提供了参考。
FZXB
猜你喜欢
化工机械(2022年1期)2022-03-21
水泵技术(2021年5期)2021-12-31
制造技术与机床(2019年11期)2019-12-04
制造技术与机床(2018年12期)2018-12-23
北京航空航天大学学报(2017年4期)2017-11-23
华东理工大学学报(自然科学版)(2017年5期)2017-11-01
通信电源技术(2016年1期)2016-04-16
制造技术与机床(2015年10期)2015-04-09
现代机械(2015年1期)2015-01-15
中国神经再生研究(英文版)(2014年23期)2014-06-01
