
基于改进蚁群算法的移动机器人路径规划
2020-03-10 15:39刘兆丽朱运海刘成业李向东
科学与财富 2020年33期
刘兆丽 朱运海 刘成业 李向东

摘 要:本文在传统蚁群算法的基础上进行了相应的改善。通过改进转移概率、信息素更新策略以及利用多步长策略进行二次路径规划。在转移概率中增加权重系数,降低蚂蚁陷入盲目搜索的可能,减少了蚂蚁死锁的数量;信息素更新原则,自适应调整提高搜索能力,降低局部收敛性,提高全局收敛性和机器人寻找目标点的工作效率;通过利用多步长策略进行二次路径规划,求解路径长度的最优解不仅降低了机器人的能耗,也降低了机器人的劳损,节约成本。实验结果显示,本文提出的算法全局搜索能力较高,收敛速度较快,能够快速的找到最优路径,可以有效提高机器人工作的效率,验证了本文算法的适用性和有效性。
关键词:蚁群算法;全局收敛;移动机器人;信息素
引言
蚁群算法是由Dorigo.M等人提出的一种新型进化的算法,在路径规划的问题上具有解决问题的明显优势[1]。但是蚁群算法也存在易陷入局部最优解和死锁等问题,为此很多学者做出了大量改进工作,比如动态化搜索算子[2],有效提高解的质量和收敛速度;设定信息素阈值[3],防止信息素过多或者过少而使算法收敛速度慢或者过早收敛;最大最小蚂蚁系统[3],只在每次迭代的最优路径上强化信息素浓度,减少其他路径对蚂蚁寻找路径的影响。蚁群算法还可以与其他算法相嵌合,比如:文献[5]将人工势场产生的力与蚁群的信息素相结合,使信息素扩大到远离障碍区域的地方,提高了机器人搜索范围和速度;文献[6]将遗传算法和蚁群算法相结合,把每一次迭代完成后所产生的路径作为基础,通过不断选择的交叉不同来获得本次迭代的最佳路径。本文做出的改进具体有:1)改进状态转移概率公式,减少蚂蚁死锁的数量,进一步提高收敛速度;2)改进信息素更新策略,自适应调节信息素的挥发因子,克服蚂蚁在寻优过程中陷入局部收敛等问题;3)进行二次路径规划,优化路径长度和转弯次数降低能耗,提高移动机器人适应性和运转效率。
1 蚁群算法核心思想
1.1栅格地图建模
栅格法是路径规划常用的模型,其中利用每个栅格的取值来表示障碍物和可移动区域,空白部分用0表示,为自由栅格,即移动机器人可以移动的区域,阴影部分用1表示,为障碍物栅格,即移动机器人不可移动的区域[7]。本文选用栅格地图建模,将栅格地图的左下角视为坐标原点,将栅格最下端的水平方向视为X轴,将栅格最左端的垂直方向视为Y轴,构建出直角坐标系,在本文中小于栅格面积1/2的视为自由栅格,大于栅格面积1/2的视为障碍物栅格。另外,本文假设每个栅格为边长为1cm的正方形。如图1所示。
2 改进蚁群算法
2.1 状态转移概率公式的改进
蚁群在路径搜索初期无法避免的会产生大量交叉路径,另外由于算法禁忌表的限制,蚂蚁很容易陷入死锁状态,最终导致“迷失”,大量蚂蚁停滞不前[8]。如图2所示。
蚂蚁k 从当前位置i 移动到下一个位置j 受到两个指标的影响:概率选择和信息素的更新。本文在状态转移概率公式中引入加权因子T(T∈(0,1)) ,提高算法的收敛速度。改进后的公式如下:
2.2信息素更新策略
2.3通过多步长策略进行二次路径规划
目前国内外学者针对移动机器人步长选择主要为单步长策略,这种单步长搜索方式会使移动机器人搜索到的路径过长,时间成本增加,本文算法选择多步长策略,当移动机器人采用多步长二次路径规划策略时,先通过本文的改进蚁群算法搜索出移动机器人最优单步长路径,如图3中的虚线所示,其中将虚线路径作为二次路径规划的参考,依次把当前节点与下一个节点相连,同时判断移动机器人是否与障碍物相撞,如果没有碰撞,则继续往下一个节点转移,直至撞到障碍物,那么当前节点与此节点的上一个节点连心为最佳路径,如图3中实线所示,两条路径的对比结果很明显,多步长选择策略具有明显的优势,缩短了移动机器人的路径长度、转弯次数以及降低了时间成本。
3 算法仿真对比
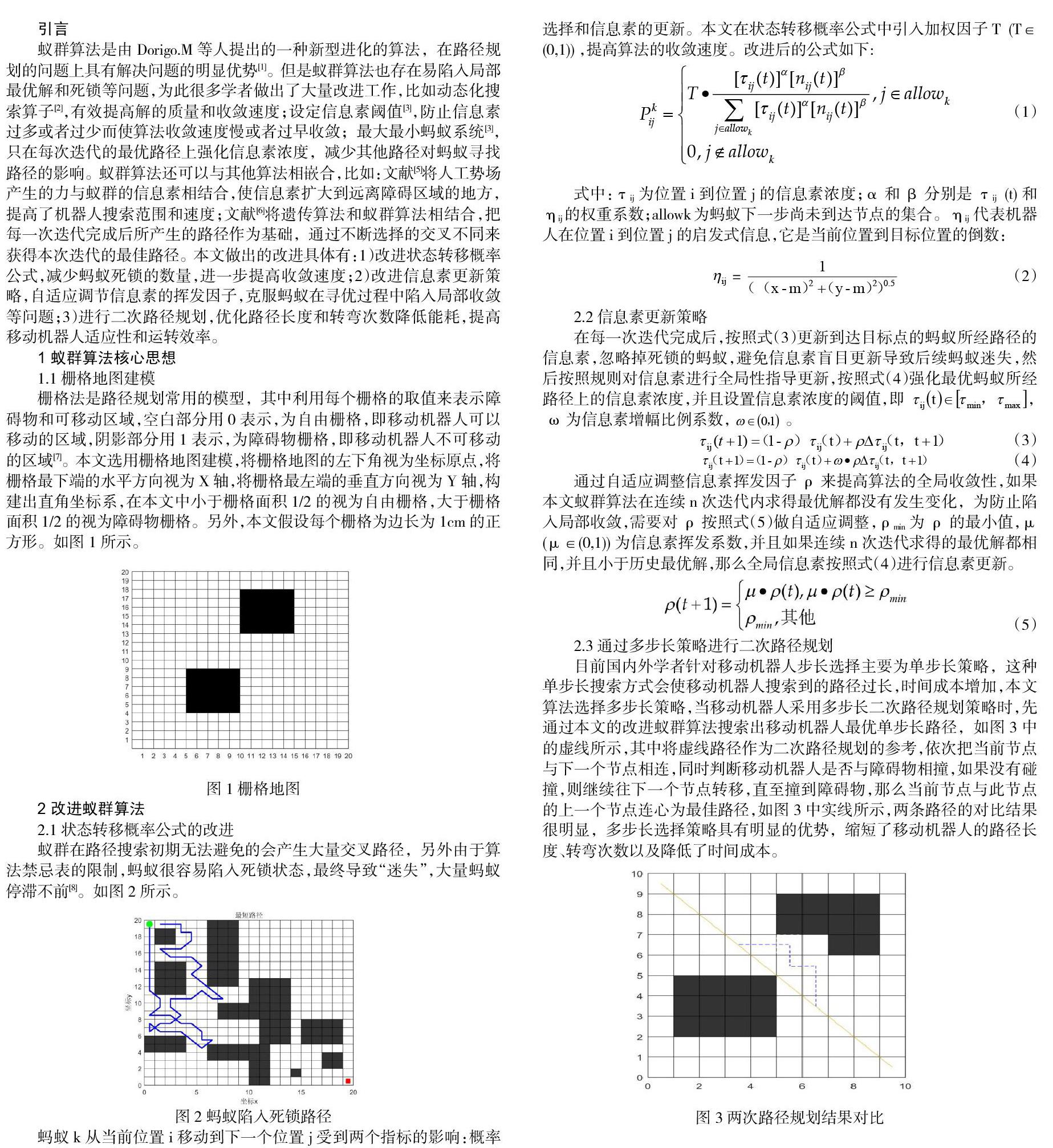
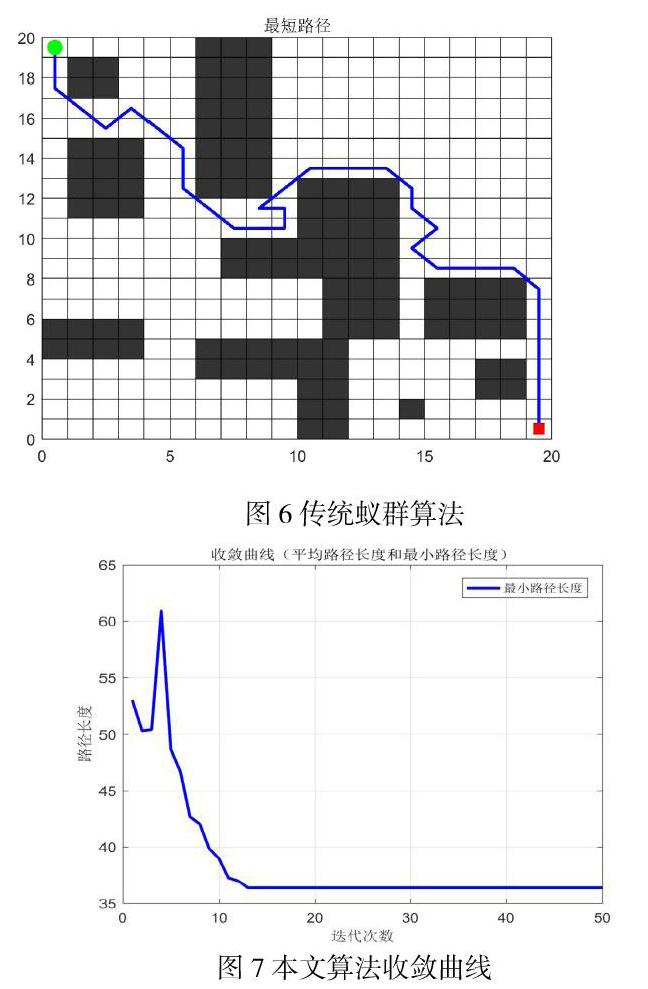
在同一栅格地图环境下,图4所示为本文改进算法的情况下移动机器人的路径规划轨迹,可以看出移动机器人的路径长度更短,转弯次数更少。图5所示为文献[4]的改进蚁群算法的移动机器人的轨迹,可以看出在同一栅格地图模型下,出现了陷入局部收敛的情况,转弯次数增多,从而增加了移动机器人的能源消耗。图6是传统蚁群算法,很容易看出虽然移动机器人可以到达终点,但是路径长度明显增长,转弯次数明显增多,这样不仅增加了移动机器人的能耗也增加了机器人的劳损,相比较而言成本较大,不适合现实场景的应用和收益。图7 是本文算法和文献[4]的收敛曲线和最短路径长度,通过本文算法的优化,移动机器人的收敛次数降到了13次就可达到稳定,而文献[4]的算法需要22次才能达到稳定,实验结果显示本文的算法具有较高的适用性和稳定性。在栅格地图中,文献[4]的算法的结果显示最短路径的长度是41.796,而本文的算法的结果显示最优路径的长度是36.382,提高了12.9%;文献[4]的算法的迭代次数是22,而本文算法的迭代次数是13,减少了40%。本文算法根据解的分布情况,自适应的进行信息素浓度的更新,动态强化最优路径上的信息素强度,并且利用多步长策略进行二次规划,因此在同一个栅格地图环境下,相对于文献[4]的算法,本文算法大大提高了收敛速度以及缩短了路径长度,使本文算法收敛速度快并且达到全局性最优,验证了本文算法的有效性和优越性,两种算法比较如表1所示。
4 结论
针对传统蚁群算法在复杂路径规划中的种种不足,本文提出一种改进的蚁群优化算法。该算法利用起始位置点的信息,增加权重因子,从而改进转移概率公式,用小于1对解空间更全面的搜索,有效筛选死锁的蚂蚁,提高了蚂蚁的搜索能力和速度;信息素的更新策略,提高了蚂蚁全局性的指导搜索能力;利用多步长策略进行二次路径规划,明显减少了节点的数量,节省了算法运行时间,有效的降低了移动机器人的损耗和能耗,降低成本。实验结果表明,本文算法具有更高的稳定性和收敛性。
参考文献:
[1]DORIGO M,GAMBARDELLA L M.Ant colony system:A cooperative learning approach to the traveling salesman problem [J].IEEE Transactions on Evolutionary Computation,1997,1(1) : 53-66.
[2]游晓明,刘升,吕金秋.一种动态搜索策略的蚁群算法及其在机器人路径规划中的应用[J].控制与决策,2017,32(03):552-556.
[3]姚艷.一种最大最小蚂蚁系统的改进算法[J].数学的实践与认识,2014,44(15):242-247.
[4]杨萍,赵珍,郑海霞.基于改进蚁群算法的移动机器人全局路径规划方法研究[J].机械制造与自动
[5]王晓燕,杨乐,张宇,等.基于改进势场蚁群算法的机器人路径规划[J].控制与决策,2018,33(10):1775-1781.
[6]汪杰君,刘江宽,黄喜军,等.基于混合遗传蚁群算法的数字微流控芯片测试路径规划[J].电子测量与仪器学报,2017,31(08):1183-1191.
[7]曲小康,芮小平,韩莹,等.栅格成本距离计算的改进蚁群算法[J].地球信息科学学报,2016,18(08):1052-1059.
[8]夏小云,周育人.蚁群优化算法的理论研究进展[J].智能系统学报,2016,11(01):27-36.
基金项目:山东省科学院院地产学研协同创新基金(2018XXY-19、2019-CXY12)
作者简介:刘兆丽(1992),研究生:研究方向:物联网工程
*通讯作者:朱运海(1974),研究员;研究方向:机器人控制决策;
*通讯作者:刘成业(1979),助理研究员;研究方向:移动机器人;
(齐鲁工业大学(山东省科学院)自动化研究所 济南 250353)
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
四川轻化工大学学报(自然科学版)(2021年3期)2021-08-30
制造技术与机床(2017年3期)2017-06-23
软件导刊(2016年11期)2016-12-22
软件导刊(2016年11期)2016-12-22
电脑知识与技术(2016年28期)2016-12-21
科技视界(2016年18期)2016-11-03
科技视界(2016年4期)2016-02-22
智能系统学报(2015年4期)2015-12-27
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28
