
图书搬运机器人总体结构设计
2020-03-11 03:01王植平陈鑫陕鹏徐静卓马娜娜
科学与财富 2020年35期
王植平 陈鑫 陕鹏 徐静卓 马娜娜

摘 要:图书馆的图书整理工作非常的繁琐。一个图书馆往往有大量的书籍需要管理员管理;对于不熟悉图书馆的借书人来说想要在茫茫书海中找到一本自己想要的书是非常困难的。此次设计就是帮助管理人员管理书籍的同时帮助人们更加快速的借书。机器人小车采用AGV磁导轨实现规划轨迹,利用FRID与Aleph 500软件联合应用找到特定书籍,后取走相应书籍给用户。
关键词:轨迹归划;FRID;AGV
0 引言
随着经济和文化的快速发展,越来越多的人开始到图书馆借书,用知识武装自己。现代图书馆大型化、多功能性导致图书馆的管理员工作压力越来越大。大部分读者不明白图书馆藏书的一般规律,为了找一本自己喜欢的书往往会花上几个小时,多数时间都浪费在找书上面。因此,设计一个能够帮助管理员整理书籍的同时还能够帮助人们快速借阅书籍的机器人很有必要。
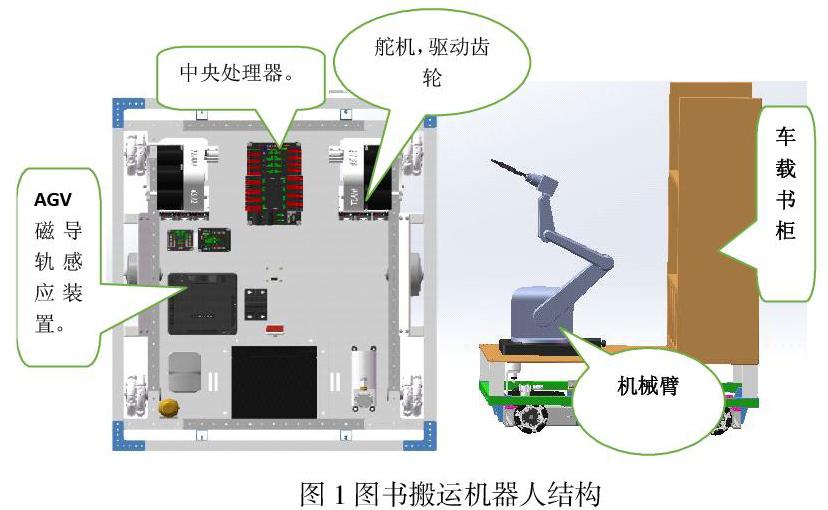
1 机器人的结构
图书机器人结构分两大主要部分。
(1)第一部分是小车底盘:
小车部分主要是驱动系统和控制系统。驱动系统主要由舵机以及传动齿轮组成,舵机主要控制小车的方向,传动齿轮则负责小车的前进和后退。控制系统有中央处理器,主要计算起点终点的位置进行轨迹规划和控制整个车的运行,处理红外探头所返回的信息,控制小车的姿态来规避障碍。
(2)第二部分是搬运机械臂:
车载书架提供将书架上的书取出以后临时放置的功能。临时放置书籍的位置可以一次性的取更多的书,可以节约时间并提高工作效率。机械臂是作为在书架取书的工具,利用FRID技术将具体书籍准确定位以后由伺服电机驱动机械臂到达相应的位置拿取书籍放回到书架上。
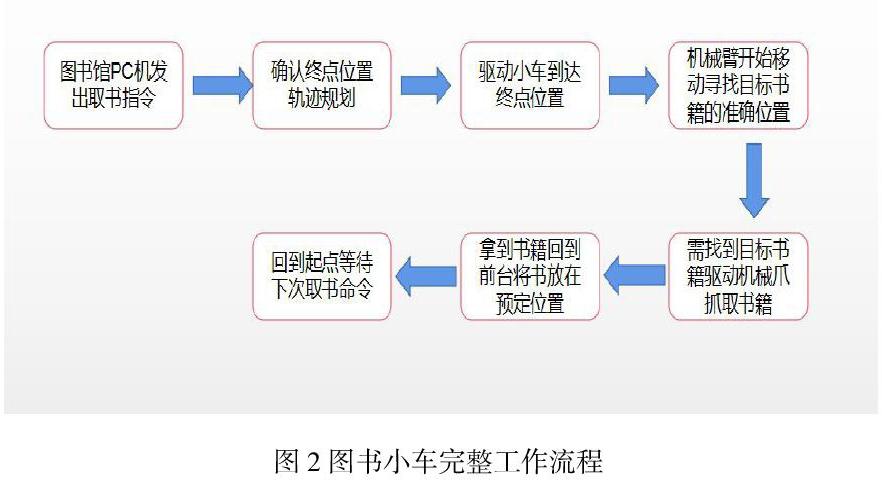
2 图书搬运机器人的工作流程
图书馆的PC机向小车发出取书的指令后有小车确认终点位置进行轨迹规划,并驱动小车到达终点位置。移动机械臂寻找目标书籍的准确位置后驱动机械爪抓取书籍并将书籍运送至指定位置。最后回到起点等待下次取书指令。
3 机器人功能实现
3.1硬件功能实现:
(1)机器人的驱动
因为是在图书机器人是在阅览室活书库环境中使用,地面比较平坦,所以机器人采用箱体式设计,运动方式为轮式驱动,采用差速转向的方式。
机器人驱动电机为24V直流伺服电机,采用PC104主板进行控制,以windows系统作为图书馆计算机和机器人终端的人机交互的方式。
(2)机器人的轨迹规划
线路导航采用的是磁导轨(AGV)的方式进行导航。使用预埋电磁钉系统实现对机器人的寻路导航机器人通过预埋的磁钉来进行存取书籍(流程如图3所示)。将每个磁钉进行编号(如图4所示)机器人上的磁感应系统与地下预埋的磁钉相互感应确定小车的位置并不断的将信号反馈给电驱动模块的处理器;处理器基于信号生成相应的控制信号控制电机的运行。运用红外传感器用于防止碰撞,实现避障的功能。
利用电磁条为机器人提供路线导航的同时还可以利用电磁感应为机器人提供能源支持,通过电磁条为机器人提供能源支持就能够解决机器人需要重复充电的需求同时由于不需要携带电源设备因此可以大幅度的减轻机器人的自重。
3.2机器人实现存取书籍方面
机器人采用5自由度的机械手实现书籍的拿取功能,5自由度的机械臂能够完全满足抓取书籍的功能。机械手采用连杆机构通过齿轮实现开闭功能,运用伺服电机控制齿轮的旋转来控制机械手的开合角度,如图5所示。
3.3软件功能实现:
(1)对整个图书馆采用以图书馆集成系统Aleph 500。
Aleph 500是一个基于智能化设计的产品,采用分布式的逻辑结构和多层客户机/服务器体系结构以及成熟开放的关系数据库(ORACLE)。
Aleph 500软件的优点众多:灵活性的模块化组件,可以根据需要裁减,以适合用户的需求;友好的用户工作流和简洁直观的图形界面提高了馆员和用户的效率;组件可以修改和定制,任何规模的图书馆及其联合组织都可以建立自己独一无二的管理系统;依据OpenURL、XML、OAI、NCIP、ODBC等工业标准,Ex Libris产品提供最终的资源共享能力、完全的连通性和其他系统和数据库的无缝协调工作能力;固有的多层客户机/服务器结构,确保Aleph 500满足用户今天和未来的需求。多语种对UNICODE完全支持,提供了多方向和多脚本文本能力。可以提供20余种的用户接口。
(2)图书馆机器人采用多处理器协调模式。
对机器人不同的功能用不同的处理器进行处理,同时链接到同一个单片机芯片上,通过中间芯片发出对各个不同系統的指令最终实现对图书的存取工作,以及对路线的规划。不同的芯片处理不同问题然后再将结果进行汇总进行集中处理可以降低对程序的编程要求。
(3)机器人对图书的识别方式。
书籍识别方面采用RFID技术进行对书籍的识别。
RFID技术即频识别,RFID(Radio Frequency Identification)技术,又称无线射频识别,是一种通信技术,俗称电子标签。
RFID技术在图书馆扫描方面相比红外线扫描条形码有巨大的优势,RFID技术是不需要通过条形码进行扫描因此能够降低对图书漏扫错扫的几率,对图书的识别更加的简单。而且RFID技术的远距离识别可以使机器人初始对书架的定位等更加的方便。对书架的定位可以在需要同时取走多本书的时候进行整体的轨迹规划能够节约时间成本和机器人的运行成本。
4 功能拓展
在此基础上可以通过物联网技术开发小程序功能,支持对相应图书的预约。通过小程序对图书进行预约后图书机器人会提前将所需要的图书检索获取,把目标图书从书架送至前台。借书人只需要在前台登记信息后就可以把书籍带走。这样预约式的借书不仅可以节约借书者找书的时间还可以有效的减少人们在图书馆逗留的时间;间接的提高图书馆的容纳量。而且遇到一类书不够的情况时,预约借书还能够帮助人们提前一步借到自己想要的书。
5 结论
图书机器人是一种可以帮助借书人快速的在书海中找到自己所需要的一本书的机器人。尽管这个设计雏形在很早以前就已经实现,但都只是出于实验阶段,因为各种原因都没有在公共图书馆大量使用。这个机器人以单片机为主要控制系统,人机交互为Windows系统使我们更加的熟悉,学习起来也更快捷,同时利用PC机对机器人的控制更加的直观,在后面的发展中想要拓展更多的功能时也方便很多。机器人可以帮助管理员管理图书,将顾客归还的图书按照相应的次序摆放在书架上;当图书馆收藏新的书籍可以帮助管理员快速的归类。
但是这个机器人目前只能单一的帮助图书管理员将图书按照已有的次序有序的将书籍摆放在书架上。面对游客看完后随意放置在书架的书籍无法做到将他重新放回到正确的位置。这是一个急需改进的地方。相信这些问题在试验性应用后是能够快速得到解决的。
参考文献:
[1]蒋羽鑫.图书管理助手机器人导航避障技术研究[J].吉林化工学院图书馆,2017,第35期。
[2]赵晋芳,张海华,郭太君.一种图书搬运机器人的设计[J].沈阳工学院机械与运载学院,2016,第4期。
[3]夏正伟,李全,端文慧,傅平.RFID图书自动盘点机器人应用研究——以武漢大学图书馆为例[J]武汉大学信息管理学院,武汉大学图书馆,2020,第1期。
[4]樊慧丽,邵波.智能机器人图书盘点创新实践与思考——一南京大学图书馆为例[J].南京大学信息管理学院,2018,第9期。
作者简介:
王植平(1998-),男,湖北恩施人,本科,武汉商学院机器人工程专业;主要研究方向:工业机器人系统集成。
陕鹏(1999-),男,湖北公安人,本科,武汉商学院机器人工程专业;主要研究方向:工业机器人系统集成。
徐静卓(1998-),男,湖北咸宁人,本科,武汉商学院机器人工程专业;主要研究方向:工业机器人系统集成。
马娜娜(2000-),湖北天门人,本科,武汉商学院机器人工程专业;主要兴趣和研究方向有机器人的集成设计,智能机器人编程,机器人教育。
通讯作者:
陈鑫(1988-),男,湖北武汉人,硕士,武汉商学院教师,工程师;主要研究方向:工业机器人系统仿真,视觉识别。
[基金项目] :大学生创新创业项目,项目号:202011654094, 名称:DIY机器人定制平台。
(武汉商学院机电工程学院 湖北 武汉 430056)
