基于BP神经网络的高速动车组网络控制系统时延研究
2020-03-24 08:47宋程王元东徐滨全
科技创新与应用 2020年9期
宋程 王元东 徐滨全

摘 要:當前,高速动车组的控制系统迅速向网络化与智能化方向发展,网络控制系统已被大规模地应用于高速动车组的控制系统之中,网络控制系统可实时地传输高速动车组中各个设备的数据并监控高速动车组的运行状态,以保证高速动车组安全地运行。但高速动车组的通信网络控制端口和变量数目非常多且各端口的长度与特征周期也各异。故高速动车组的网络控制系统在输出数据的时候,不可避免地出现网络时延现象,该现象严重地威胁着高速动车组网络控制系统的实时性和稳定性。由于高速动车组的网络控制系统是一种非线性系统,故文章针对带有时延问题的高速动车组非线性网络控制系统,提出一种有效的优化方法,即将BP神经网络递推预测与广义预测控制结合起来,先根据BP神经网络递推预测的方法对网络控制系统未来的输出进行预测,然后利用递推最小二乘法对网络控制系统未来时刻的系统参数进行辨识,将非线性网络控制系统在每一时刻进行线性化处理,最后由广义预测控制算法补偿非线性网络控制系统的时延且对所提出的方法进行实验仿真,实验结果表明:该方法可有效地消除高速动车组网络控制系统的时延,同时具有实时性高、计算速度快及鲁棒性强等优点,显著地优化了带有时延问题的高速动车组非线性网络控制系统。
关键词:BP神经网络;广义预测控制;递推最小二乘法;高速动车组;网络时延
中图分类号:TP39 文献标志码:A 文章编号:2095-2945(2020)09-0001-05
Abstract: At present, the control system of high-speed EMU is rapidly developing in the direction of networking and intelligence, and the network control system has been widely used in the control system of high-speed EMU. The network control system can transmit the data of each equipment in the high-speed EMU in real time and monitor the running status of the high-speed EMU, so as to ensure the safe operation of the high-speed EMU. However, the communication network control ports and variables of high-speed EMU are very large, and the length and characteristic period of each port are also different. Therefore, when the networked control system of high-speed EMU outputs data, the phenomenon of network delay is inevitable, which seriously threatens the real-time performance and stability of the networked control system of high-speed EMU. Because the networked control system of high-speed EMU is a kind of nonlinear system, this paper proposes an effective optimization method for the nonlinear networked control system of high-speed EMU with time delay, that is, combining BP neural network recursive prediction with generalized predictive control, firstly, the future output of networked control system is predicted according to the recursive prediction method of BP neural network. Then the recursive least square method is used to identify the system parameters of the networked control system in the future, and the nonlinear networked control system is linearized at every moment. Finally, the time delay of the nonlinear networked control system is compensated by the generalized predictive control algorithm, and the experimental simulation of the proposed method is carried out. The experimental results show that this method can effectively eliminate the time delay of the networked control system of high-speed EMU. At the same time, it has the advantages of high real-time performance, fast computing speed and strong robustness, which significantly optimizes the nonlinear networked control system of high-speed EMU with time delay.
Keywords: BP neural network; generalized predictive control; recursive least square method; high-speed EMU; network delay
1 概述
随着中国高速铁路的快速发展,高速动车组网络控制技术有了巨大的突破。虽然传统的控制系统已在工业上得到了广泛地应用,但其发展空间已达到极限,故迫切地需要一种数据传输可靠且能实时地进行控制的网络系统。列车通信网络(TrainCommunicationNet,TCN)应运而生,1999年国际电工委员会通过的标准成为动车组控制网络系统设计的主流[1]。为实现精准且实时地控制,TCN网络利用过程数据来进行周期性地更新。对于非紧迫的且数据量过大的数据,TCN网络使用消息数据来进行数据的有效传输。相比于传统的工业控制系统,高速动车组网络控制系统对传输数据的实时性要求极高,但高速动车组通信网络控制端口和变量非常多且各端口的长度和特征周期也各异。故数据在传输的过程中不可避免地产生网络时延现象,这极大地影响了高速动车组网络控制系统的安全性。
本文研究了带有时延现象的高速动车组网络控制系统,提出了一种有效的优化方法,即将BP神经网络递推预测与传统的广义预测控制结合起来,以优化高速动车组网络控制系统且对所提出的方法进行实验仿真,实验结果对高速动车组网络控制系统的设计具有重要的意义。
2 高速动车组通信网络结构
中国标准动车组网络控制系统遵循GB/T 28029.1-2011标准,高速动车组网络控制系统采用两级总线式拓扑结构,分为动车组级总线WTB和车辆级总线 MVB,布设以太网来实现软件更新及数据下载[2]。通过制定动车组级及车辆级通信协议,实现对高压、牵引等系统在内的整车逻辑控制、状态监视、故障诊断,并实现互联互通。将TCN网关作为动车组级和车辆级的数据转换器,高速动车组通信网络结构如图1所示。高速动车组不同牵引单元的重要数据通过WTB总线进行通信并把数据传输给中央控制单元处理,高速动车组的关键子系统与中央控制单元之间的数据交换是通过MVB总线与输入输出模块来实现的。高速动车组同时采用以太网作为总线,通过各车厢的以太网交换机与显示屏、无线传输装置等设备相连接来实现数据的交换。
3 高速动车组网络时延产生的原因和分类
高速动车组网络控制系统对实时传输数据的要求极高,但实时控制一般采用过程数据传输,把变量周期性地置于控制单元之间发送且高速动车组通信网络控制端口与变量的数量非常多,此外各端口的长度及特征周期也各异[3]。故在数据传输的过程中会不可避免地产生网络时延现象。这对高速动车组网络控制系统的实时性与稳定性产生了严重的威胁,产生网络时延的主要因素有:网络带宽受限、网络信息源过多、数据碰撞及网络负载的随机变化。把网络时延定义为:一个报文或分组从网络的一端传输至另一端所需的时间。以下分别介绍幾种时延并分析。
(1)发送时延。发送时延是指计算机或路由器把数据包全部传输至传输媒介中所需的时间。(2)传播时延。数据通过传播媒介的时间称为传播时延,网络的传播时延的大小与其传播距离正相关。(3)处理时延。在高速动车组网络控制系统中,计算机和路由器都需要对接收到的数据进行处理,所消耗的时间称为处理时延。网络传输数据越多,处理时延就越大。(4)排队时延。数据通过网络传输的过程中,需经过许多不同的路由器,但路由器不能同时处理发送的数据,故数据需在路由器中排队等待,所消耗的时间称为排队时延。
根据以上分析可知:网络时延=传播时延+发送时延+处理时延+排队时延
4 BP神经网
BP神经网络是一种带有反馈通道且可自我学习的神经网络。BP神经网络最基本的算法是梯度下降法[4],其原理为:为了提高整个BP神经网络的准确率,将实际输出与期望输出相比较,若两者的误差较大,就开始反向传播,从而不断地更新BP神经网络连接的权值,直到两者的误差在预先设定的范围内。
4.1 BP神经网络正向通道算法
用N个样本训练BP神经网络,当前时刻使用p个样本对BP神经网络进行训练,样本P由输入层到隐含层第i个神经元的输入是:
5 广义预测控制
广义预测控制是指系统先通过预测、校正及优化后输出一个控制量,再采集系统下个时刻的输出且不断地重复上述步骤,实时地控制系统,最终达到确保控制系统稳定运行的目的[6]。对系统进行预测控制且不断地提高高速动车组运行的稳定性及安全性,本文选择受控自回归积分滑动平均模型作为广义预测控制模型,该模型可表示为[7]:
式(5-20)为状态空间形式的广义预测控制规律。在上述广义预测的算法之中,由于在模型的预测中实际值与预测值可能不一样,故在控制的过程中只对当前时刻进行控制且把当前时刻的控制值与系统上个时刻的预测值进行比较,通过误差对模型预测值进行校正,重复上述步骤可不断地优化和校正。故在控制系统受到外界因素的干扰或期望值与预测值的误差较大时,反馈会校正控制系统。广义预测控制有效地克服了系统中不确定性所带来的影响,增强了系统的控制性能,对高速动车组网络控制具有重要的意义。
6 递推最小二乘法辨识
递推最小二乘法辨识,主要可分为:在线辨识和离线辨识,在线辨识是指实时地获取控制系统中的数据且利用递推最小二乘法对系统中各参数进行辨识,且实时地对系统中的参数进行更新、不断地减小参数的误差,使其不断地接近目标值[8]。离线辨识是指先获取系统中所有数椐,然后再进行辨识但系统的参数不会实时地更新[9]。在线辨识相比较于离线辨识,在线辨识可实时地修正辨识参数,故在高速动车组网络控制系统中选用在线辨识更具有优势。
7 BP神经网络递推预测与动车组非线性网络控制系统
7.1 BP神经网络递推预测
通常非线性模型用离散时间数学模型可表示为:
上式中n,m分别为非线性控制系统的输出y(k)与输入u(k)的阶次,f(*)是不确定的非线性函数。由以上可得:
故根据递推预测原理可得出d步之后,k+d时刻的系统预测输出值为:
BP神经网络递推预测模型如图2所示。
图2 BP神经网络递推预测模型
选用BP神经网络最主要的原因是BP神经网络能较准确地逼近非线性模型,能表示出无法用数学函数描述的非线性系统[10],且多步递推预测具有良好的准确性与实时性。
7.2 高速动车组非线性网络控制系统
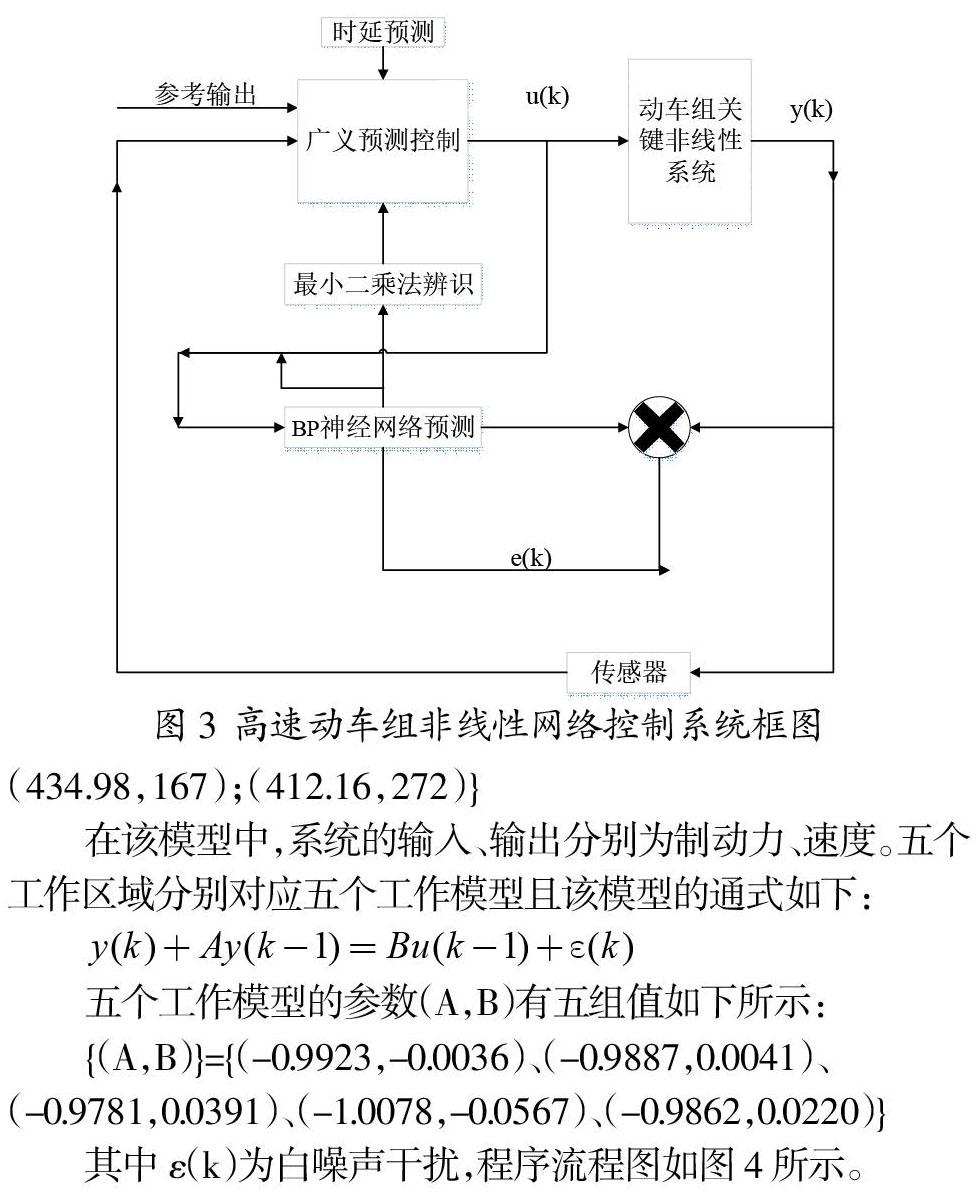
本文将BP神经网络递推预测与广义预测控制结合起来,以解决高速动车组中非线性网络控制系统的时延问题。传统的广義预测控制适用于线性系统且对网络控制系统中常见的时延具有良好的补偿作用[11],但高速动车组的网络控制系统为非线性系统,故须先根据BP神经网络递推预测的方法对控制系统未来的输出进行预测,然后利用最小二乘法对系统未来时刻的系统参数进行辨识,将非线性系统在每一时刻进行线性化处理,最后由广义预测控制算法补偿时延对非线性网络控制系统的影响。高速动车组非线性网络控制系统框图如图3所示。
由于高速动车组网络控制系统对实时性要求较高,故BP神经网络预测部分及递推最小二乘法部分均是按照时间顺序进行的,递推算法的思想为:当前时刻的计算值等于前一时刻或前几个时刻的计算值与修正项之和。
8 实验仿真与结果分析
8.1 高速动车组制动模型
8.2 BP神经网络递推预测的建立与训练
本文所采用的基本网络为BP神经网络,对高速动车组制动模型进行数据采集并制成数据集,用所得数据集对BP神经网络进行训练。把当前时刻及上一时刻的速度输入BP神经网络之中,把下一时刻的速度作为输出,创建一个三层的BP神经网络。隐含层的激活函数为tansig函数,输出层的函数为purelin函数。隐含层神经元设置过多或过少产生的现象分别是:BP神经网络收敛过慢、BP神经网络的输出结果与实际输出的误差较大。故需对不同数量的神经元进行测试,精度取0.001,把隐含层神经元的数量分别设置为10、30、50、100,通过上面的模型可得500个数据,450个数据作为训练集,50个数据作为测试集,测试的参数为:运行时间的最大值、实际输出与期望输出之间的误差及单次数据处理所需要的时间。实验结果如表1所示。
表1 BP神经网络神经元个数测试实验
由表1可知,100个比10个神经元的BP神经网络运行时间的平均值要大0.83ms,但误差的平均值要远小于10个神经元的BP神经网络。当BP神经网络的神经元个数由30变为50时,BP神经网络实际输出与期望输出之间的误差减小,这说明隐含层神经元个数越多,误差越小。但BP神经网络的处理速度也会变慢。在高速动车组上采样周期一般为64ms,故隐含层神经元个数选为50。依据不同工作区间再分别取100组数据,共采集数据500组,450组数据为训练集,50组数据为测试集。训练步长取1000,性能指标取0.1%,学习速率取为10%。
8.3 高速动车组非线性网络控制系统仿真
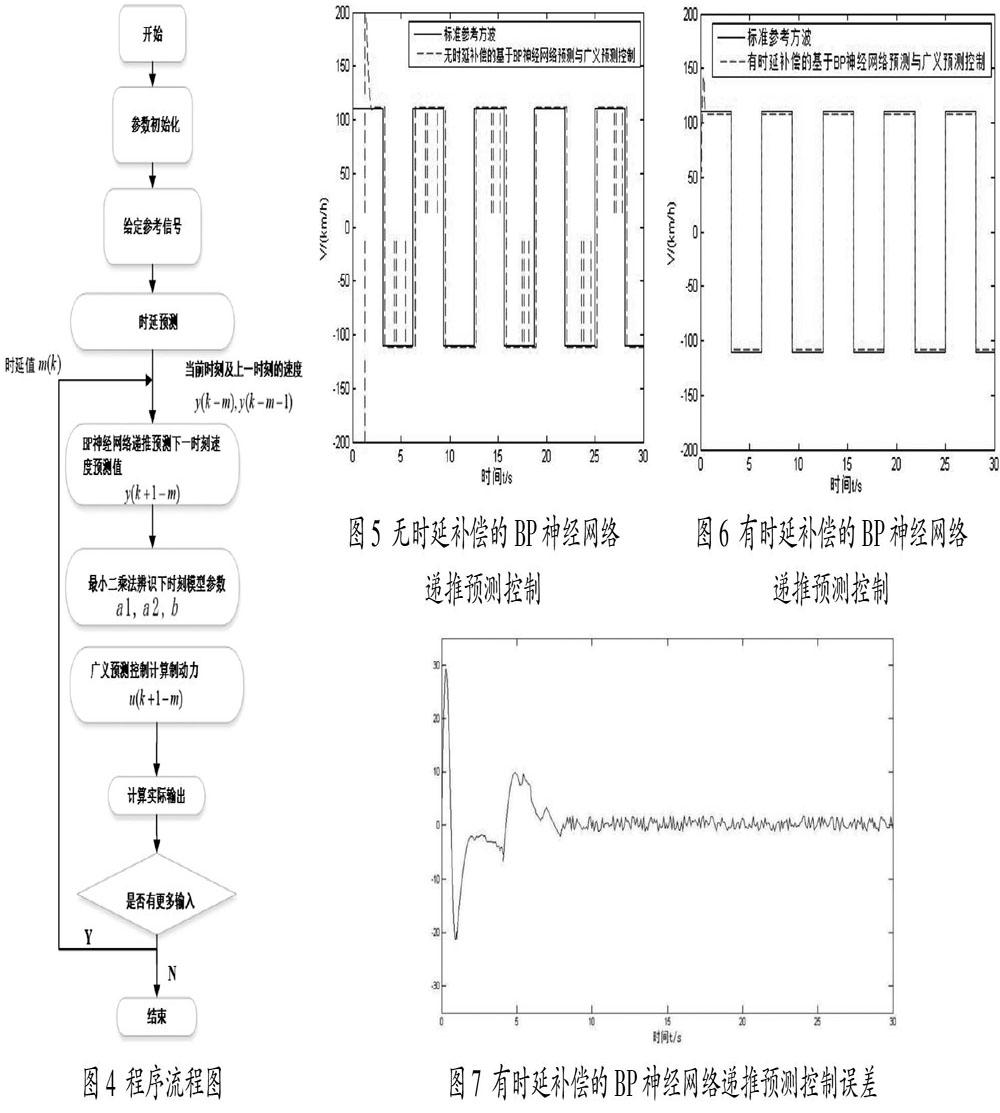
为验证本文所提出的方法的有效性,将已训练好的BP神经网络加入到非线性网络控制系统中进行仿真。对有无时延补偿进行对比实验,验证时延补偿的有效性。把方波信号作为目标信号,加入特征周期为64ms时,测试得到的时延数据,任务周期和采样周期分别为50ms与64ms。分别对加入时延补偿和未加入时延补偿的非线性网络控制系统进行仿真。无时延补偿的BP神经网络递推预测控制效果如图5所示。由图5可知,在对方波信号的跟踪过程之中,存在较大的误差、波动较大且对目标信号的跟踪不稳定,控制系统整体的控制性能不理想。
有时延补偿的BP神经网络递推预测控制效果及误差如图6与7所示。由图6和7可知,在跟踪方波的实验过程中,加入时延补偿后控制系统在初始阶段会出现一个非常短暂的振荡,但之后便可较快、较稳定地跟踪方波目标信号且误差波动的幅度较小,相对稳定,在稳定阶段最大误差小于±3。故加入时延补偿可较好地提高系统的控制性能。
9 结束语
本文将BP神经网络递推预测与广义预测控制结合起来,可有效地消除高速动车组非线性网络控制系统的时延现象且利用MATLAB软件对所提出的方法进行实验仿真,实验中对比了有无时延补偿对非线性网络控制系统控制性能的影响。本文的实验证明了所提出的方法具有抑制时延效果好且实时性高、控制效果好、计算速度快及鲁棒性强等优点,对高速动车组非线性网络控制系统的设计具有重要的参考价值。
参考文献:
[1]Tindell K, Bruns A, Wellings A J. Caclulating Controller AreaNetwork(CAN) Message Respnese Times[J]. Control Eng. Practice,1995,3(8):1163-1169.
[2]G.-B. Huang,Q.-Y. Zhu, and C.-K. Siew,"Extreme learning machine: A new learning scheme of feedforward neural networks," in In Proc. International Joint Conference on Neural Networks (IJCNN'2004), (Budapest, Hungary), July 25-29,2004.
[3]倪文波,王雪梅.高速列车网络与控制技术[M].西南交通大学出版社,2010.
[4]G.E. Hinton, N. Srivastave, A. Sutskever, I. Sutskever, and R.R. Salakhutdinov. Improving neural networks by preventing co-adaptation of feature detectors. arXiv:1207.0580, 2012.
[5]LIAN F L, Moyue J R,Tibury D M. Network design consideration for distributed control systems[J]. IEEE Trans on Contr Syst Tech, 2002,10(2):297-307.
[6]王巖,孙增圻.网络控制系统分析与设计[M].北京:清华大学出版社,2009.
[7]Liman Yang, Yunhua Li, Guilin Yang. Analysis of Delay and TrafficLoad in Networked Control System [C]//Proceedings of the 2005IEEE/ASME International Conference on Advanced Intelligent Mechatronics. USA: IEEE/ASME, 2005: 1425-1430.
[8]LI H B,CHOW M Y.EDA-based speed control of a networked DC motor system with time delays and packet losses[J]. IEEE Transactions on Industrial Electronics,2009,56(5):1727-1735.
[9]Hespanha J P, Naghshtabrizi P, Xu Y G: A survey of recentresults in networked control systems[J]. Proceedings of the IEEE,2007,95(1):138-162.
[10]龚利.铁路机车远程监测与故障诊断系统设计[J].计算机工程,2012,38(4):227-229.
[11]Fei-Yue Wang, Derong Liu, in:Networked Control Systems Theory and Applications, Springer Publishers, London(2008).
猜你喜欢
山东工业技术(2016年24期)2017-01-12
山东工业技术(2016年24期)2017-01-12
山东工业技术(2016年24期)2017-01-12
中国高新技术企业(2016年33期)2016-12-27
现代经济信息(2016年27期)2016-12-16
价值工程(2016年30期)2016-11-24
数字技术与应用(2016年9期)2016-11-09
软件导刊(2016年9期)2016-11-07
科技视界(2016年20期)2016-09-29
科技视界(2016年12期)2016-05-25