
基于变论域模糊PID控制的BLDCM仿真分析
2020-03-25 05:17郑德聪李志伟
微特电机 2020年3期
张 轩,徐 苗,郑德聪,李志伟
(1.山西农业大学 工学院,晋中 030801; 2.山西农业大学 信息科学与工程学院,晋中 030801)
0 引 言
无刷直流电机(以下简称BLDCM)是随着新型永磁材料及电子换相器的出现而诞生的一种同步电机[1],它具有响应速度快、扭矩大、无机械摩擦、噪声低、寿命长、可靠性高的优点,被广泛地应用于航空航天、交通运输、工业自动化等领域[2]。针对BLDCM控制系统,通常采用传统PID控制器[3],而BLDCM具有电机参量时变、负载扰动频繁、系统本身强非线性强耦合性等特点[4],故PID控制效果较差。
针对BLDCM在调速控制系统方面的研究,诸多学者提出了多种方法,如模糊控制[4]、神经网络控制[5]、基于遗传算法的参数优化控制[6]。文献[4]提出将模糊控制理论应用于机械臂关节用BLDCM控制器,仿真结果表明,相比于普通PID,参数自适应模糊PID控制响应速度快、鲁棒性好。文献[5]提出将神经网络算法应用于BLDCM的PID控制器转速环,仿真结果表明,相比于普通PID,神经网络PID控制器鲁棒性较好,缺点在于待寻优参数较多、收敛速度慢、容易陷入局部最优解[7]。文献[6]提出了一种基于遗传算法的PID参数优化控制方法,仿真结果表明,相比于普通PID,该方法具有更快的响应速度、更小的稳态误差,缺点在于收敛速度较慢。
本文研究一种变论域模糊PID转速控制器,通过MATLAB/Simulink建立BLDCM转速、电流双闭环控制系统,并基于S函数编制了变论域模糊控制代码。仿真结果表明,该控制系统响应速度、超调量、抗干扰能力均优于普通PID控制、模糊PID控制方案,体现了变论域自适应模糊PID控制方案在解决非线性时变系统方面具有较好的应用价值。
1 双闭环BLDCM调速系统
BLDCM由永磁体转子、三相绕组定子、电子逆变器等组成,本文采用最常见的三相六状态BLDCM模型,其功率管驱动采用Y型全桥式两两导通方案,使得永磁体转子始终受到绕组磁场的洛伦兹力作用而连续转动[8]。电机的气隙磁感应强度在空间呈梯形分布等理想情况下[8],电磁转矩方程:

(1)
式中:ea,eb,ec为各相绕组反电动势;ia,ib,ic为各相电流;ω为电机转速。
BLDCM的运动方程:
(2)
式中:Te为电磁转矩;Tl为负载转矩;B为阻尼系数;J为电机转动惯量。
双闭环BLDCM调速系统的工作原理如图1所示,包括转速控制器、电流控制器、电压逆变器、电机、电流反馈单元、PWM换相单元,其中转速控制器为外环,电流控制器为内环。

图1 双闭环BLDCM调速系统工作原理
2 变论域模糊自适应PID控制算法
2.1 模糊自适应PID控制算法
调速系统以转速误差e和转速误差变化率ec作为PID调节器的输入信号,经过模糊控制规则表推理,使用“centroid”解模糊法,动态输出ΔKp、ΔKi、ΔKd,与原Kp、Ki、Kd分别叠加,实时调整PID控制器各参数,实现转速控制器在线自适应调整功能,控制原理如图2所示。

图2 模糊PID控制器
2.1.1 输入输出论域、隶属度函数
输入e为[-6,6],输入ec为[-1,1],输出ΔKp为[-6,6],ΔKi为[-0.3,0.3],ΔKd为[-0.03,0.03]。对于各个输入及输出域模糊集,NB及PB均选取gaussmf型隶属度函数,其余各语言值均选取trimf型隶属度函数。如图3所示。
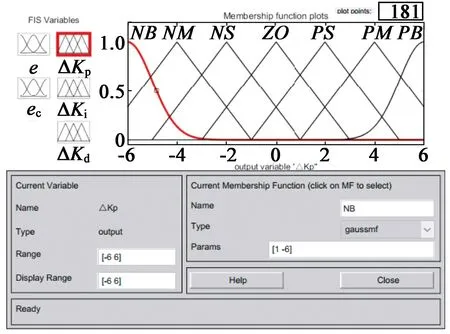
图3 隶属度函数
2.1.2 模糊规则、模糊推理
根据实际PID参数调整经验,采用mamdani法则,以e和ec为输入建立ΔKp、ΔKi、ΔKd模糊规则表,如表1所示。使用加权平均法(centroid法)对ΔKp、ΔKi、ΔKd进行在线实时修正(解模糊)。

表1 ΔKp/ΔKi/ΔKd参数模糊控制规则
2.2 变论域模糊控制算法
尽管模糊自适应PID控制改进了PID控制的适应性和稳定性,但模糊控制对于BLDCM转速工作在高精度场合的效果并不理想[9],李洪兴通过对模糊系统的插值机理进行分析,提出通过指数型/比例型非线性伸缩因子对输入输出进行实时调整,在不增加规则数目、不调整隶属度函数的情况下,输入/输出论域随着误差及误差变化率减小而收缩(增大而扩张)[10],从而利用有限的模糊规则数目提高了灵敏度和稳态精度[11]。定义X(x)/Y(x)为输入/输出变量的论域[12]:

(3)
式中:α(x)为输入变量伸缩因子;β(x)为输出变量伸缩因子。
输入、输出变量的初始论域为[-E,E]、[-F,F]。本文采用基于函数设计的伸缩因子,通过调整比例因子λ、量化因子τ即可实现论域的伸缩,其输入输出变量的伸缩因子如下。
比例型伸缩因子:
α(x)=1-λexp(-k1x2) ,λ∈(0,1) ,k1>0
(4)
指数型伸缩因子:

(5)
设输入变量e、ec的伸缩因子分别为α1、α2,输出变量ΔKp、ΔKi、ΔKd的伸缩因子为β。对于模糊控制器,e的实际输入论域为[-Eα1(x),Eα1(x)],ec的实际输入论域为[-Ecα2(x),Ecα2(x)],ΔKp、ΔKi、ΔKd的实际输出论域为[-6β(x),6β(x)]、[-0.3β(x),0.3β(x)]、[-0.03β(x),0.03β(x)]。
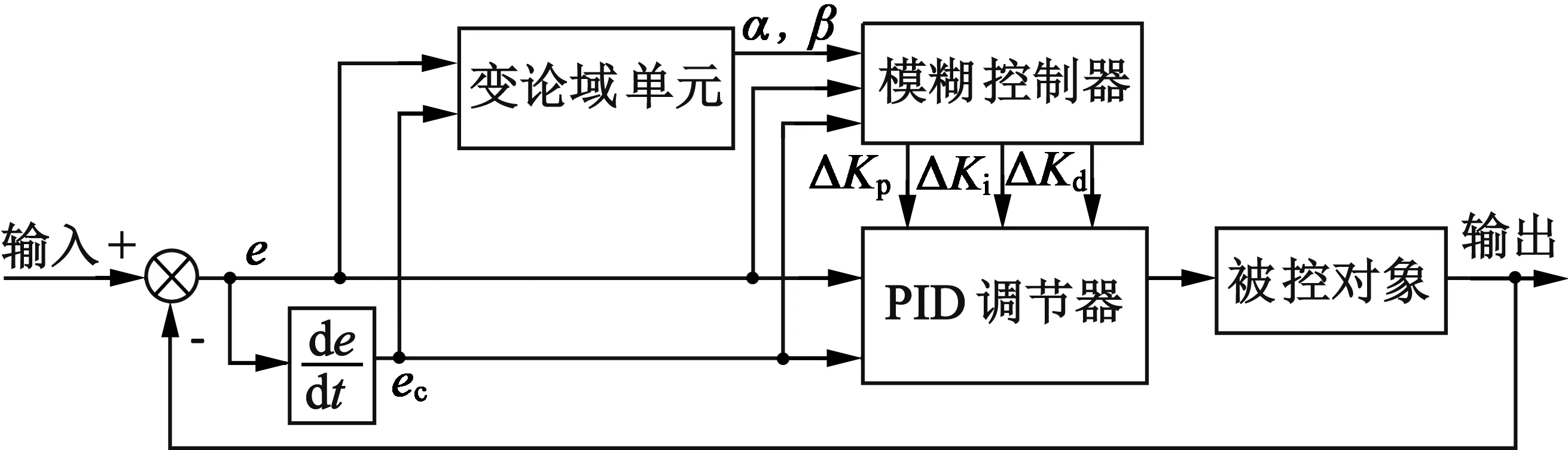
图4 变论域模糊PID控制器
3 基于S函数的变论域模糊自适应PID控制的BLDCM仿真模型
3.1 BLDCM控制系统Simulink仿真模型
在MATLAB/Simulink中构建了变论域模糊(自适应)PID控制系统的BLDCM仿真模型,如图5所示。需重点设计的模块有转速控制器,内有基于S函数的变论域模糊自适应PID控制器,如图6所示。PWM换相单元如图7所示。本文中电流控制器选用常规PID控制方案,作为内环反馈,转速控制器选用变论域模糊自适应PID控制器方案,作为外环反馈。
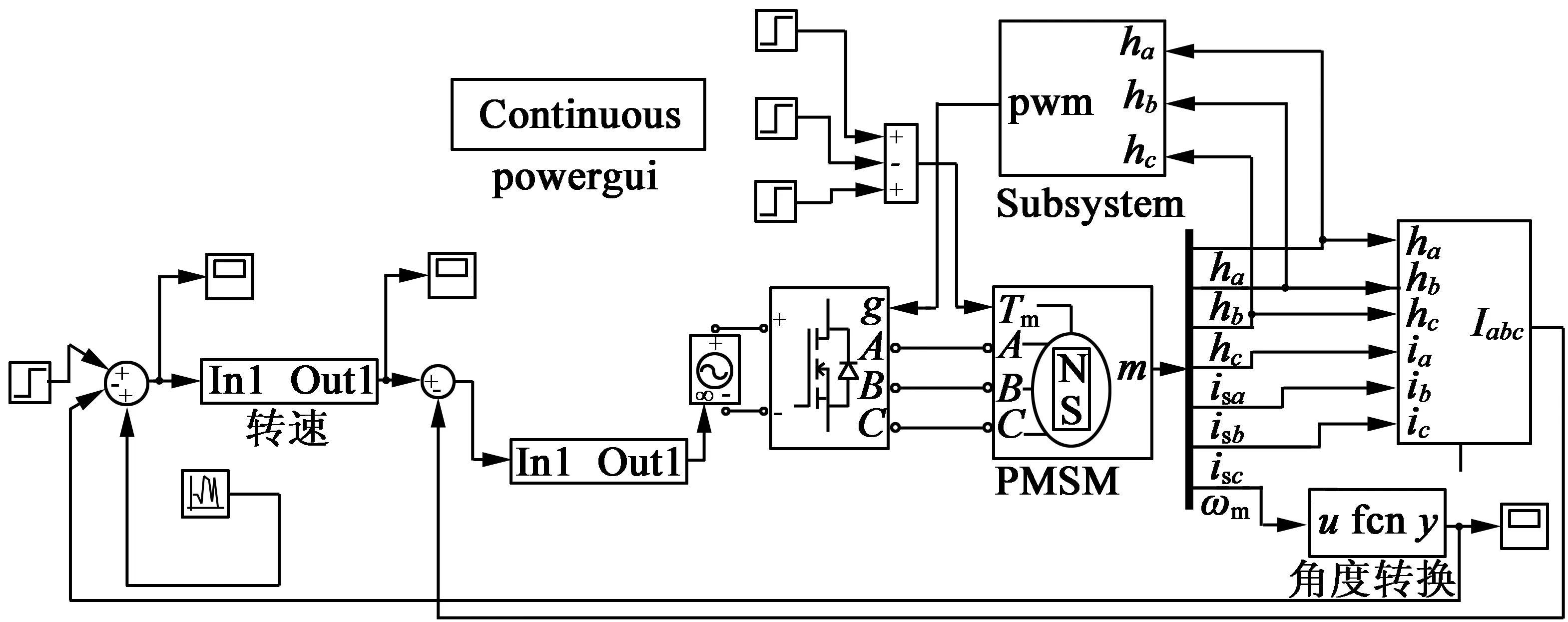
图5 BLDCM控制系统仿真模型
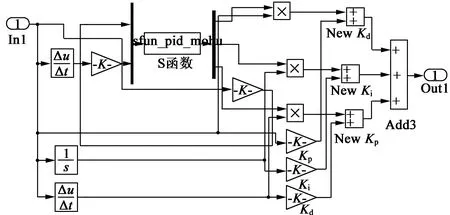
图6 变论域自适应模糊控制器
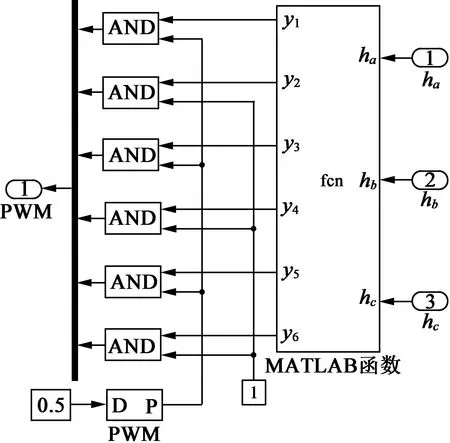
图7 PWM换相单元
3.2 S函数实现变论域模糊PID控制
变论域模糊PID控制器以误差e、误差变化率ec为S函数输入,ΔKp、ΔKi、ΔKd为S函数输出,ΔKp、ΔKi、ΔKd分别与Kp、Ki、Kd相加,得到PID调节器输出。变论域模糊PID控制流程图如图8所示。
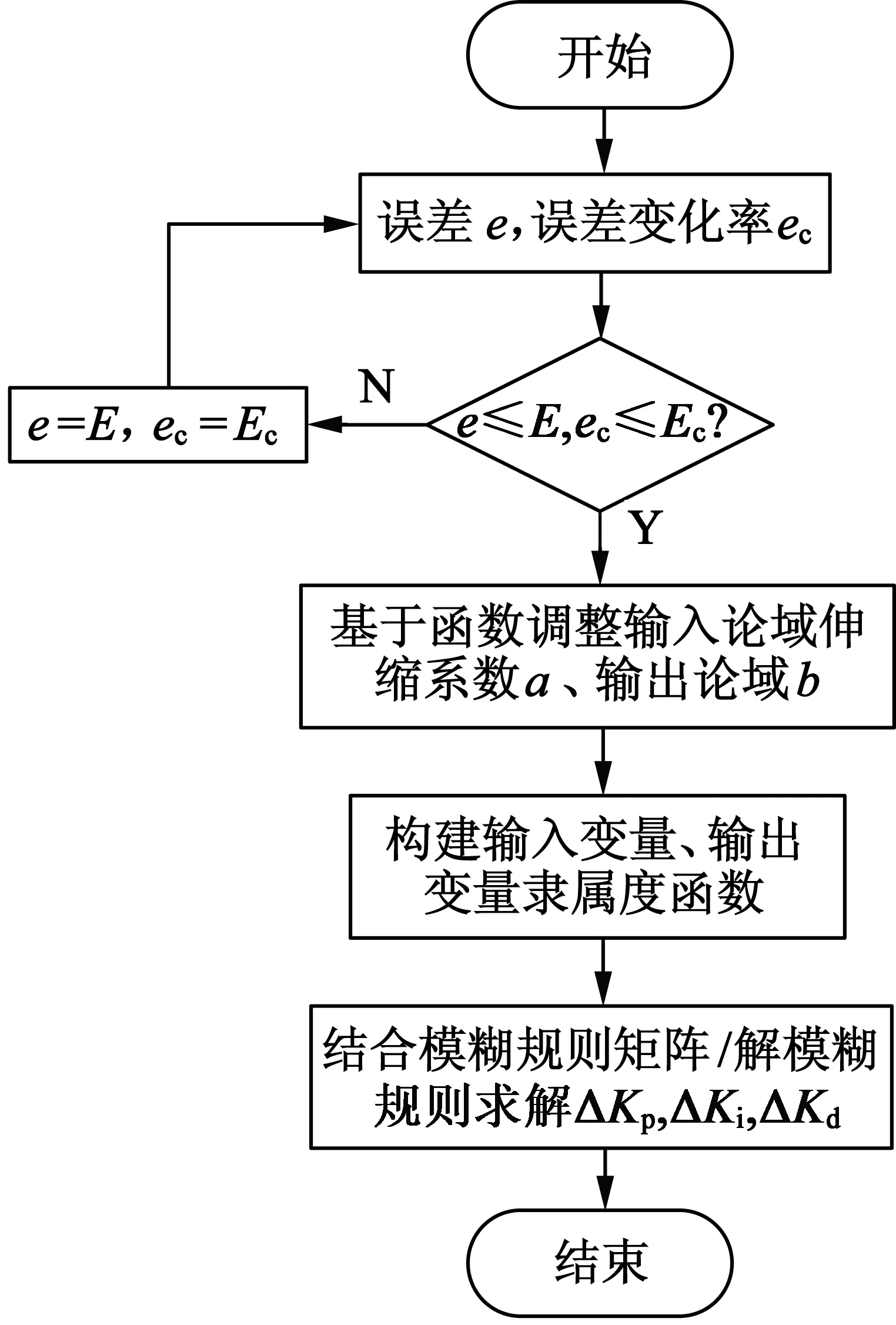
图8 变论域模糊PID控制流程图
4 仿真及抗干扰分析
对BLDCM模型进行参数设定:Rs=0.5Ω,Ls=0.01H,转子磁链ψf=0.119 4Wb,转动惯量J=0.002 7kg·m2,摩擦系数B=0,极对数p=1,初始转速ωi=0,初始转子角度θ=0。在MATLAB/Simulink中对BLDCM控制系统仿真,采样时间为1×10-4s,仿真时间为0.4s。
4.1 转速突变
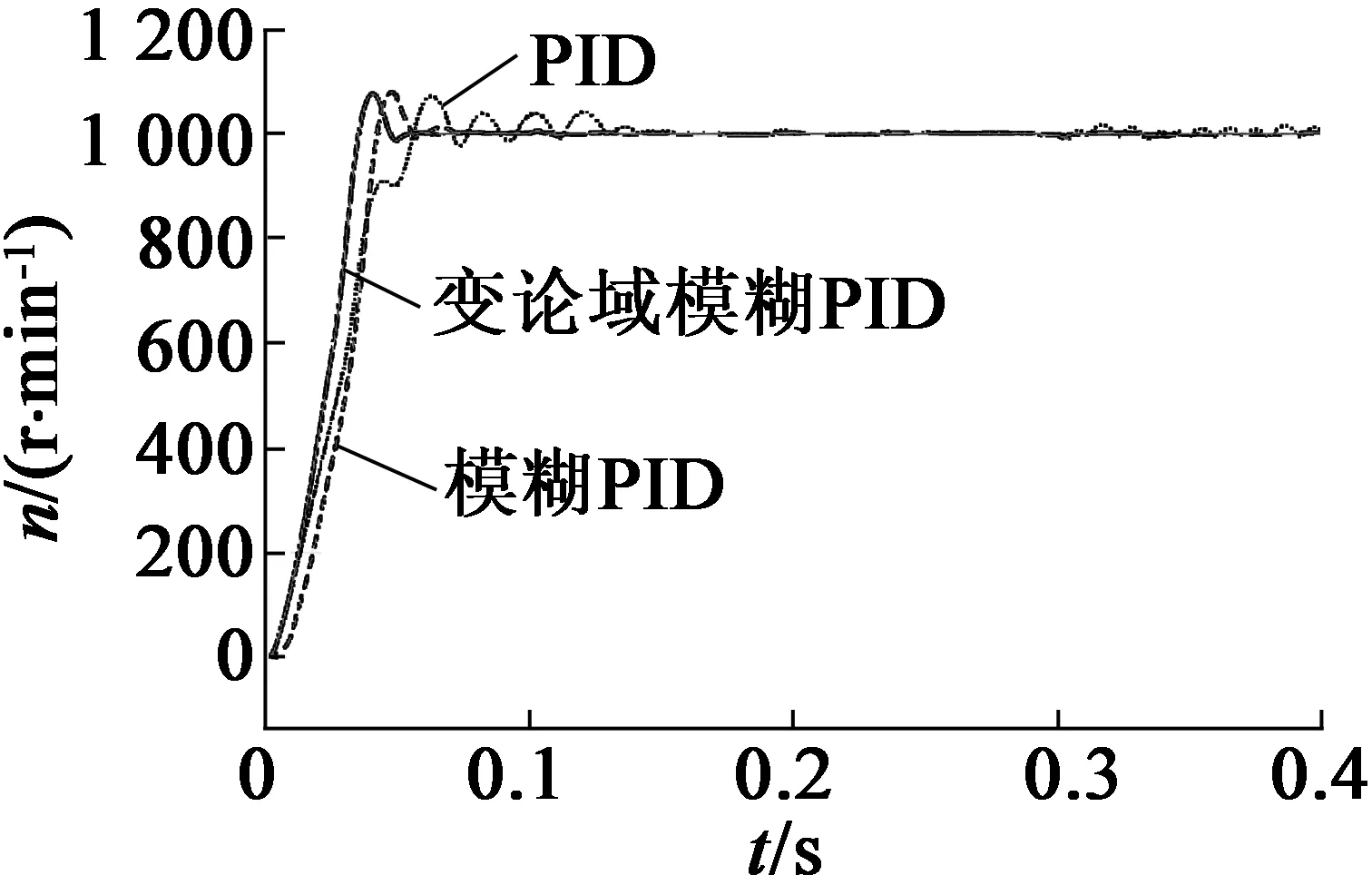
设置初始转速1 000r/min,初始负载0.3N,于0.2s处输入转速突变为2 000r/min。输入端全程加入0均值3方差值的高斯白噪声,其余设置与上述一致。转速突变下的仿真结果如表2、表3所示,转速对比如图9所示。
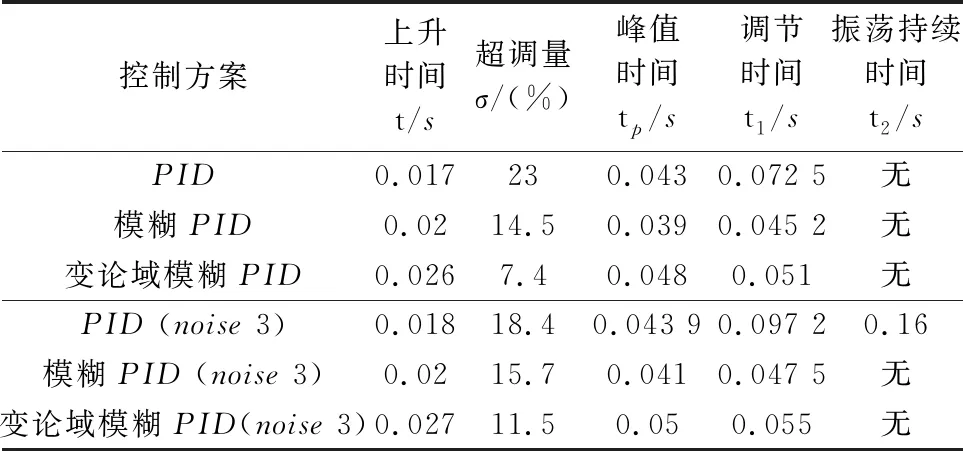
表2 转速突变(0~1 000 r/min)主要参数对比
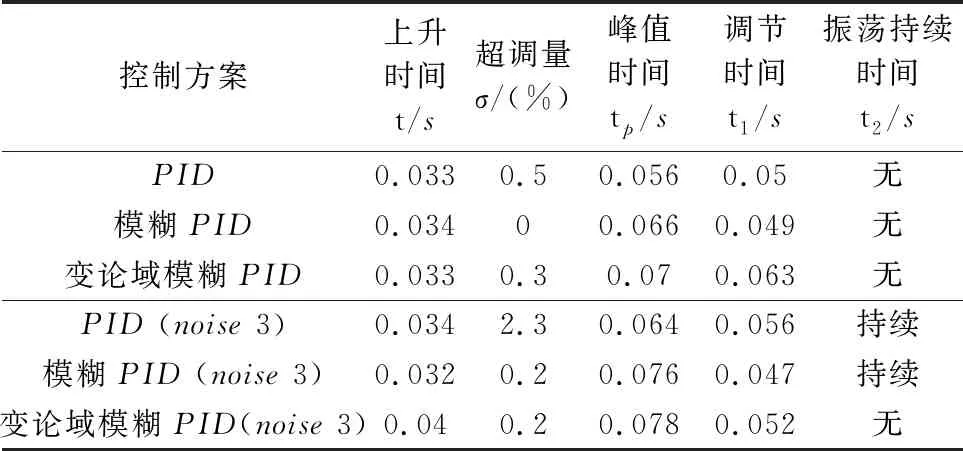
表3 转速突变(1 000~2 000 r/min)主要参数对比
由图9可知,BLDCM从0到1 000r/min调节过程中(加外干扰),变论域模糊PID超调量较PID减小了68%、较模糊PID减小了49%,调节时间较PID减少了43%,较模糊PID增加了15%,无振荡现象出现;在1 000r/min到2 000r/min调节过程中(加外干扰),变论域模糊PID相比PID超调量减小91%,与模糊PID相比超调量改善效果相同,调节时间较PID减少了7%,较模糊PID增加了10%,但相比模糊PID消除了振荡现象。
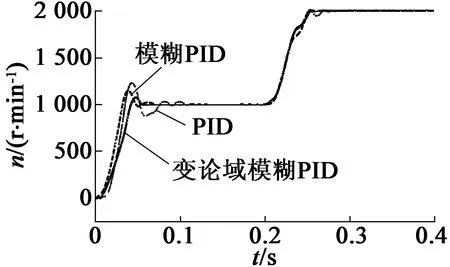
(a) 无外干扰
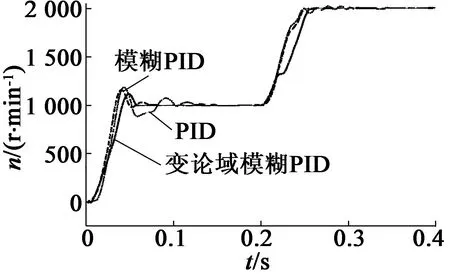
(b) 加外干扰
4.2 负载突变
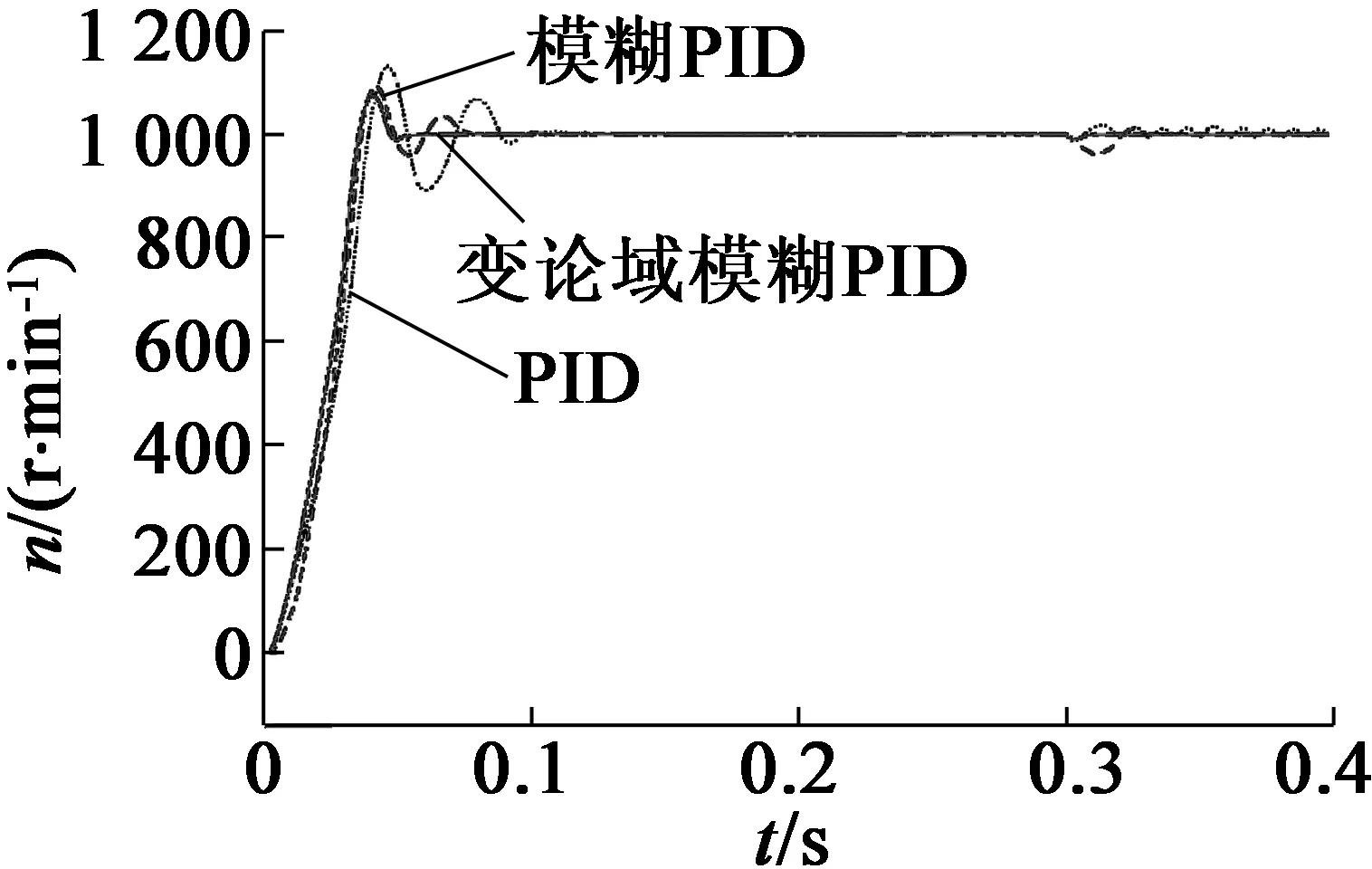
设置初始转速1 000r/min,初始负载1N,于0.1s处负载减为0.3N、0.3s处加至2N。输入端全程加入0均值3方差值的高斯白噪声,其余设置与上述一致。负载突变下的仿真结果如表4、表5所示,转速对比如图10所示。

表4 负载突变(1~0.3 N)主要参数对比

表5 负载突变(0.3~2 N)主要参数对比
由图10可知,在BLDCM运行平稳后,在存在外干扰作用及0.1s发生负载突减的情况下,变论域模糊PID较PID转速最大偏移量降低了88%、较模糊PID降低了16.7%,且实现了响应到达并保持
(a) 无外干扰
(b) 加外干扰
在终值0.1%的效果。在存在外干扰作用及0.3s发生负载突增的情况下,变论域模糊PID较PID转速最大偏移量降低了67%、较模糊PID降低了40%,响应到达并保持在终值0.1%的时间较模糊PID减少了29%。
综上,变论域自适应模糊PID控制相比于PID控制及模糊PID控制拥有更小的超调量,较快的响应速度,更强的抗干扰能力。
5 结 语
本文设计了一种基于变论域模糊PID控制的无刷直流电机控制系统,通过Simulink建立BLDCM仿真模型,并将基于S函数的变论域模糊PID控制器应用于BLDCM转速环。通过仿真分析三种控制方案下的转速调整性能,表明该变论域模糊PID控制方案在超调量、抗干扰、响应速度方面优于普通PID控制、模糊PID控制方案,为BLDCM转速精准控制提供了较好的方法。
猜你喜欢
计算机仿真(2022年2期)2022-03-15
哈尔滨工程大学学报(2021年7期)2021-07-13
成都信息工程大学学报(2021年6期)2021-02-12
电子制作(2019年16期)2019-09-27
计算机与数字工程(2019年8期)2019-09-03
科技创新与应用(2019年17期)2019-06-09
汽车零部件(2015年5期)2015-01-03
科技致富向导(2013年21期)2013-12-10
中国教育信息化·高教职教(2009年1期)2009-03-10
