自行式电缆管沟检查机器人的研制
2020-03-26 09:16陈晓
探索科学(学术版) 2020年1期
陈 晓
国网江苏省电力有限公司常州供电分公司 江苏 常州 213000
1 研究背景
现在的电力电缆采用预埋管方式进行敷设,预埋好的电缆管沟在时间长后容易出现压瘪或损坏等情况。在开展新电缆敷设时,对于地下已经埋好的管内部的状态未知,当出现管内堵塞等情况时,常常会出现电缆无法穿动的情况,这才需要采用费用昂贵的高压水枪进行冲洗等操作,导致效率低下、费时费力。若可研制一种在电缆穿管前就可以进行电缆管沟检查的机器人,在穿管前利用该装置提前进行一遍内部穿管作业,拍摄管子内部的状态,是否被压瘪、破坏或有异物等,该装置拍摄的视频可通过无线或者蓝牙传回给地面的电网运行人员,方便工作人员随时查看管内部的异常情况并确定管内堵塞的大概位置。该装置可采用与电力电缆直径相同的圆形尺寸并可调节直径大小的方式,以验证在检查装置可穿过的情况下,电力电缆也可顺利穿过。且该类检查机器人未见公开发表。
2 设计方案
本文设计的自行式电缆管沟检查机器人,包括驱动装置,纳姆轮、四爪卡盘、连接支架、电池包、控制器、三爪卡盘、行走轮、工业相机。
驱动装置为该检查机器人的动力驱动装置,安装于该装置的底部,通过电机驱动。包括电机支架、电机、连接法兰。电机支架为支撑电机的支撑件,开设的四个电机固定孔用于安装固定电机,开设的三个卡盘固定孔用于电机支架与四爪卡盘固定。电机为市售常见的直流电机,可正转和反转。连接法兰为连接电机和纳姆轮使用,设有电机安装孔和轮安装孔;电机安装孔用于将电机与连接法兰固定,用于将电机的转动力传导至连接法兰,轮安装孔用于将纳姆轮连接固定在连接法兰,以便于将电机的转动力传至纳姆轮。
纳姆轮为装置的行驶驱动轮盘,按旋转顺序可分为顺纳姆轮和逆纳姆轮,在该检查机器人的底部,通过连接法兰装设有四个纳姆轮,相对角的纳姆轮不同,这样通过电机的正反转带动时,纳姆轮产生的圆周方向力抵消,只剩轴向前后运动的力,实现检查装置的前后运动。
四爪卡盘为常见的机床用件,用于安装四只驱动轮。连接支架用于连接前后的四爪卡盘和三爪卡盘,并固定电池包、控制器。支撑板、支撑条、连接孔。支撑板用于与前后的卡盘进行固定,支撑条用于该装置的整体支撑连接,连接孔用于支撑板与四爪卡盘和三爪卡盘连接。电池包为常见的锂电池,用于给控制器和工业相机供电。控制器为该检查装置的控制模块。用于将控制四个电机的正反转以及GPS定位和图像传输。三爪卡盘为常见的机床件,可用于安装行走轮,并可调节三个行走轮的开口大小从而改变装置的行走直径。工业相机为工业用录像相机,具备防水防抖等功能,具备红外夜拍功能。安装于顶部的三爪卡盘顶部中间位置。
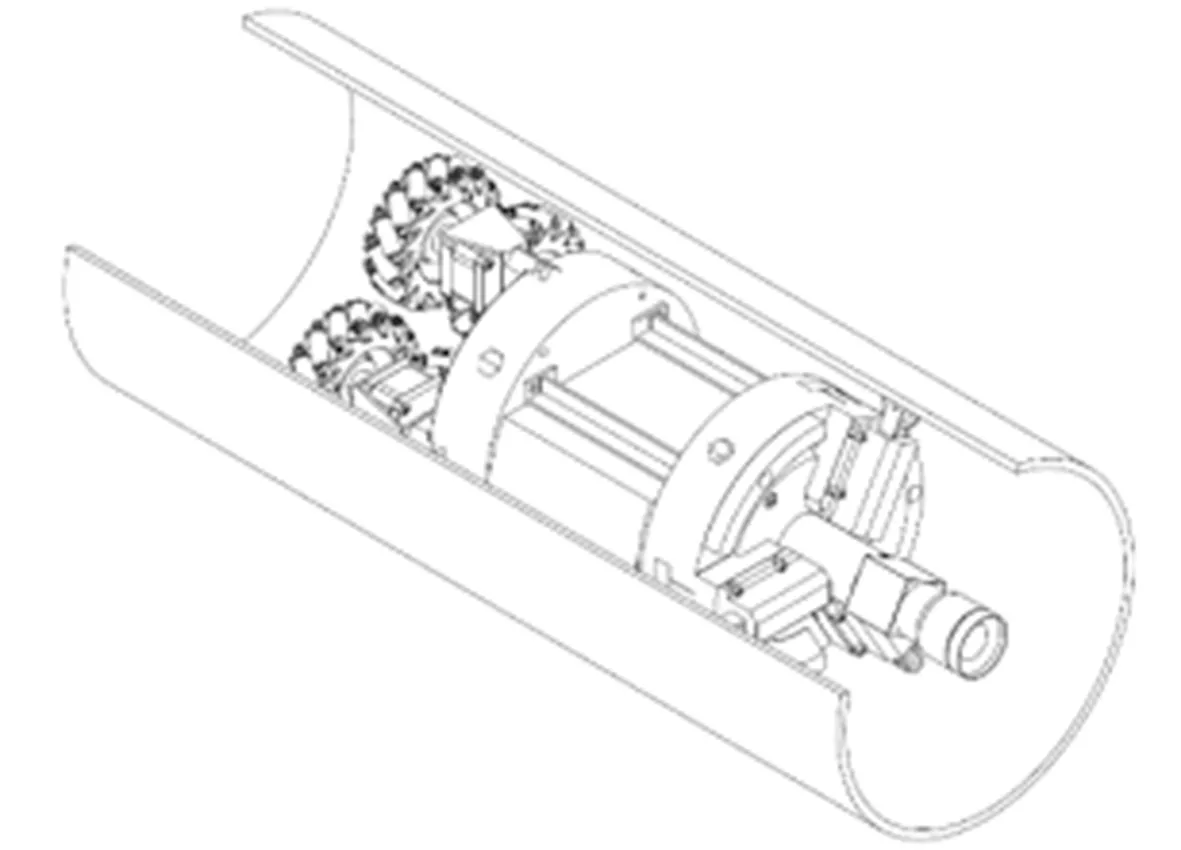
图1 自行式电缆管沟检查机器人
3 实施方法
当需要使用该电缆管沟检查装置时,由工作人员将开启电源键(开关未在图中标注),行走功能和相机的拍摄功能并启动,将装置放入需要检查的管沟的管口中,由工作人员操作控制器,使得检查装置缓慢向前行驶并摄像,影像实时传回地面,工作人员可实时观测管内状况,若遇到不可通行的障碍物,则操作人员停止装置的前进,可通过传输的GPS信号来判断精确定位,定位完成后,操作人员控制电机反转,将装置缓慢倒退出来,并关上电源键;若检查装置全程没有遇到障碍,则证明该管沟通畅通,装置将自动驶出管沟。
4 总结
本文研制的自行式电缆管沟检查机器人在管内通行能力强,可通过的管径的调节范围大,弹簧式的设计具有减震避震功能,纳姆轮的圆柱形的设计使得该装置在管内可以以任意姿态和角度行走,同时该装置具有前进倒退功能,可实时控制;结构简单、组装方便、内部集成度高,结构牢固,耐用性强;工业相机可在管内无光线时拍摄,可通过控制器实时传输录像并发现管内的异常情况,以便让工作人员判断采用何种疏通方式或及时更换使用的管道;具备GPS定位功能,可将管内障碍位置的精准定位发送给工作人员;工作人员在地面通过控制器,在较短的时间即可实现管沟的内部检查,避免了贯穿电缆时遇到障碍再继续采取清理措施的低下效率。
猜你喜欢
新技术新工艺(2022年9期)2022-10-26
锻压装备与制造技术(2022年2期)2022-05-11
内燃机与配件(2022年2期)2022-01-17
昆明医科大学学报(2021年3期)2021-07-22
中国科技纵横(2019年14期)2019-09-18
E动时尚·科学工程技术(2019年14期)2019-09-10
航空科学技术(2019年3期)2019-09-10
建材发展导向(2019年5期)2019-09-09
科学与技术(2018年1期)2018-11-09
躬耕·文化精粹(2018年2期)2018-10-20