
行星轮系中太阳轮断齿故障特性分析
2020-03-27 18:17史丽晨王海涛
机械设计与制造 2020年3期
史丽晨,李 坤,王海涛,刘 洋
(西安建筑科技大学机电工程学院,陕西 西安 710055)
1 引言
行星齿轮传动系统具有传动比大、承载能力强、体积小等诸多优点,广泛应用于风力发电、工程机械、直升机等领域[1]。由于其恶劣的工作环境,工作时常常发生轮齿故障,特别是断齿故障的发生造成整机工作不平稳甚至停机,从而造成难以估量的损失。因此对行星齿轮箱进行故障机理研究,并基于动力学建模来研究其故障特性至关重要。国内外目前对行星减速轮系的建模分析大多都是建立在正常状态下,缺乏对故障状态下的行星轮系建模研究[2-3];对行星轮系进行故障特性分析时,缺乏振动机理方面的研究[4-5];并且在对行星轮系建模分析时,没有考虑运行过程中振动传递路径时变效应的影响[6-7]。针对现有研究的不足,建立考虑振动传递路径时变效应的行星齿轮系统动力学模型,模型考虑齿轮副啮合综合误差、齿侧间隙等因素;推导太阳轮断齿故障下齿轮副的时变啮合刚度傅里叶级数表达式;通过对行星齿轮系统动力学模型的求解,分析得到太阳轮断齿时系统的频谱响应特性;最后通过试验信号进行对比,验证动力学模型分析结果的准确性。
2 行星轮系动力学建模
行星齿轮传动系统动力学模型,系统由太阳轮、行星架、内齿圈及 3 个行星轮组成,如图 1 所示。图中:θc、θs、θpi—行星架、太阳轮及各行星轮的自转角度;Kspi、Krpi、Cspi、Crpi—太阳轮和内齿圈与各行星轮的啮合刚度及啮合阻尼系数;2bspi、2brpi—啮合齿轮副侧隙;TD、TL—输入转矩和负载转矩。
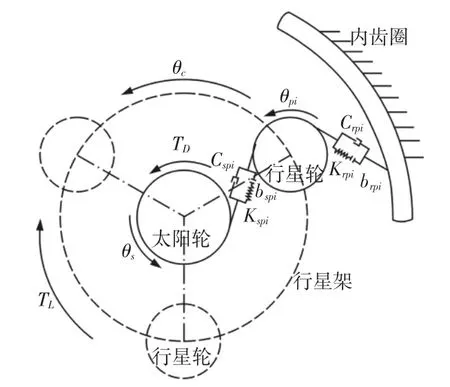
图1 行星齿轮传动系统动力学模型Fig.1 Dynamic Model of Planetary Transmission System
由Lagrange方程,可得图1所示动力学模型的微分方程:
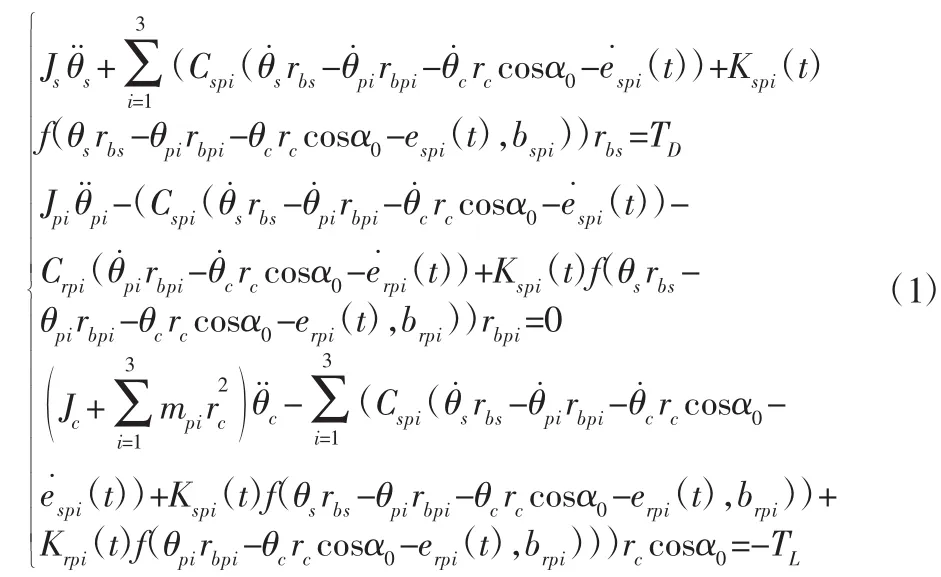
式中:Jpi—行星轮的转动惯量;Jc—行星架转动惯量;rbs—太阳轮基圆半径;rbpi—行星轮基圆半径;rc—行星架半径;mpi—行星轮质量;α0—压力角。
式中:espi(t)、erpi(t)—各齿轮副的综合啮合误差;f(x,b)—间隙非线性函数。为了便于求解,引入相对位移坐标:

定义时间标称尺度ωn及位移标称尺度bc,得量纲一动力学微分方程为:

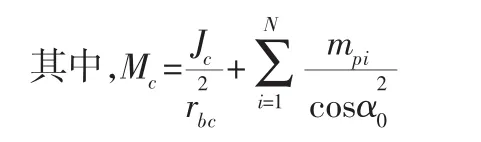
式中:rbc—行星架当量半径;
ζspi—行星轮i与太阳轮的啮合阻尼比;
ζrpi—行星轮i与内齿圈的啮合阻尼比;
Ms、Mp—太阳轮、行星轮在各自基圆半径上的等效质量。
在测量行星齿轮箱振动信号时,传感器一般固装在与内齿圈相连的箱体上,因此行星轮的公转会对测试信号产生调幅作用,这种调制作用称之为振动传递路径时变效应[8]。振动传递路径时变效应可用基频为行星架旋转频率fc的汉宁窗函数表示[9],即在模型响应信号中引入传递路径函数C(t):

3 太阳轮断齿故障啮合刚度表示
当齿轮发生断齿故障时,故障齿处刚度会减弱,其他齿处刚度不变。以傅里叶级数来表示齿轮副时变啮合刚度,先推导单对齿轮系统啮合刚度表达式,然后推广到行星齿轮传动系统中,得到太阳轮断齿时各啮合副的时变刚度表达式。
3.1 单对齿轮系统断齿故障啮合刚度表示
正常状态下齿轮副啮合刚度曲线,T为啮合周期,ka为刚度变化峰峰值,kav为平均啮合刚度,如图2所示。
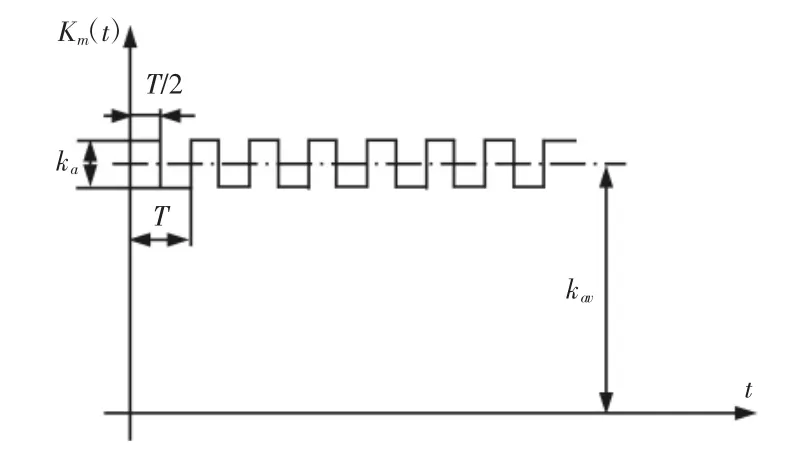
图2 正常齿轮啮合刚度曲线Fig.2 Gear Pairs Meshing Stiffness Curve Under Healthy Condition
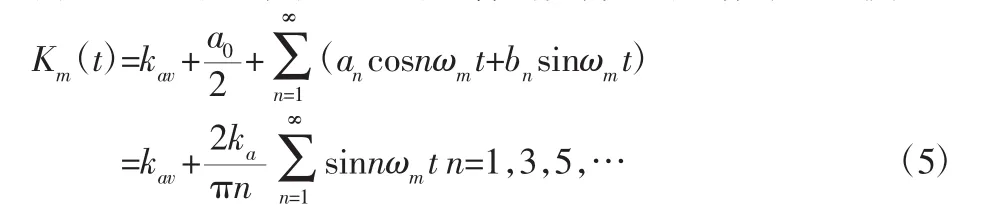
由图2可得正常状态下的啮合刚度傅里叶级数表达式为:
设单对齿轮系统某个齿轮有z个齿,其中一个齿发生断齿故障,啮合刚度曲线,如图3所示。其中,T1—故障齿轮旋转周期;kav1—断齿状态下的平均啮合刚度。
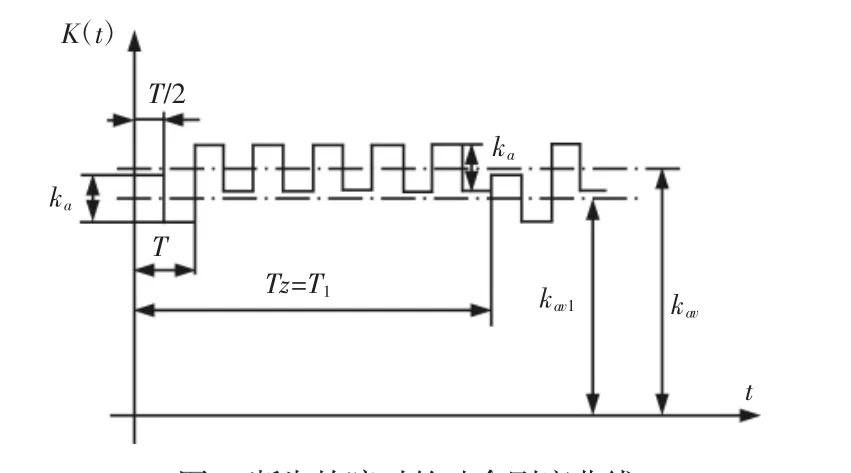
图3断齿故障时的啮合刚度曲线Fig.3 Gear Pairs Meshing Stiffness Curve Under Tooth Broken Condition
图2 和图3做差可得图4,即为断齿处啮合刚度的峰峰值图,如图4所示。
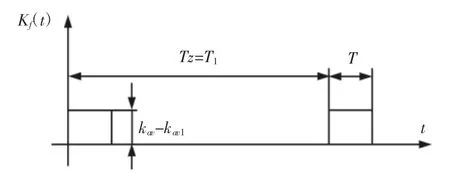
图4 断齿处啮合刚度变化的峰峰值图Fig.4 Peak-to-Peak Value Curve of Meshing Stiffness at Broken Tooth

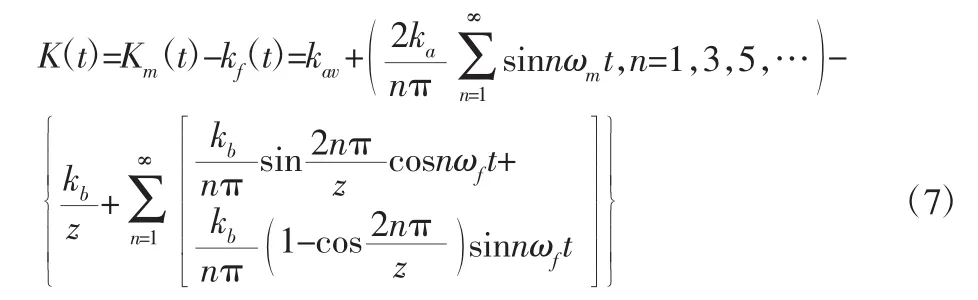
故可得图3的傅里叶级数表达式,即断齿故障下齿轮副的时变啮合刚度表达式为:
令kav-kav1=kb,则图4用傅里叶级数可表示为:
3.2 行星轮系太阳轮断齿故障啮合刚度表示
在行星齿轮箱中,内齿圈、太阳轮分别与3个行星轮啮合,共有 6 组啮合对,故对应 6 组啮合刚度[10],即 Ksp1,Ksp2,Ksp3,Krp1,Krp2,Krp3。设三个行星轮均匀承载,具有相同的物理、几何参数,则正常状态下各齿轮副的啮合刚度表达式均,如式(7)所示。
设行星齿轮箱中太阳轮的某个轮齿发生断齿故障,则6组啮合刚度中Ksp1,Ksp2,Ksp3减弱,其余三种啮合刚度不变。此时Ksp1,Ksp2,Ksp3的峰峰值,如图 5 所示。
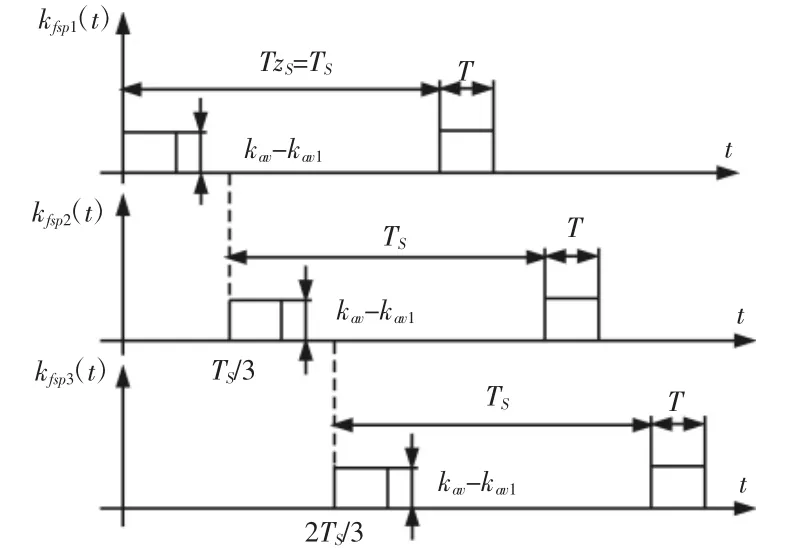
图5 太阳轮断齿故障时啮合刚度Ksp1,Ksp2,Ksp3的峰峰值Fig.5 Peak-to-Peak Value Curve of Meshing Stiffness Ksp1,Ksp2,Ksp3at Broken Tooth of Sun Gear
图中:kfsp1(t),kfsp2(t),kfsp3(t)—断齿啮合刚度Ksp1,Ksp2,Ksp3的峰峰值;zs—太阳轮轮齿数;Ts—太阳轮故障周期。
由式(6),得kfsp1(t)=kf(t),则:
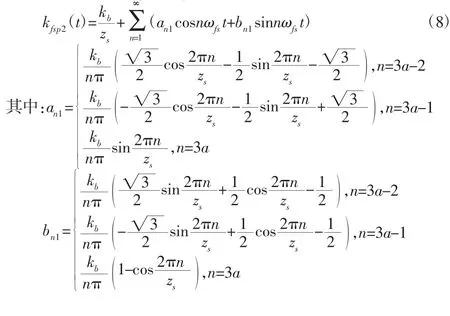
式中:a=1,2,3,…
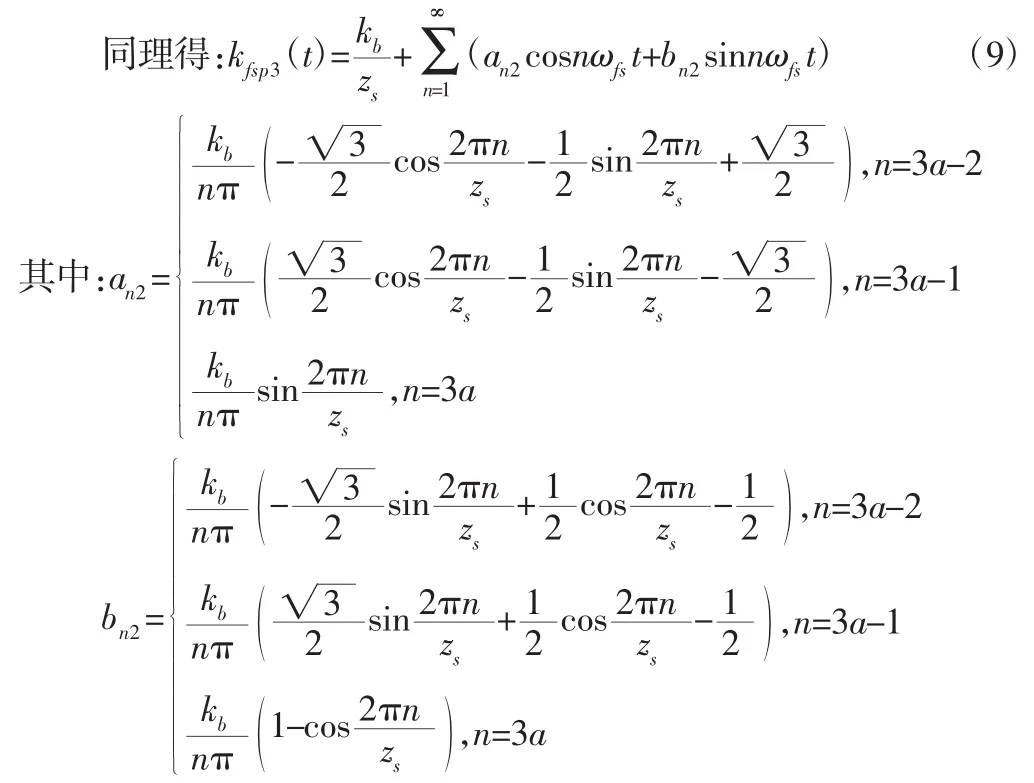
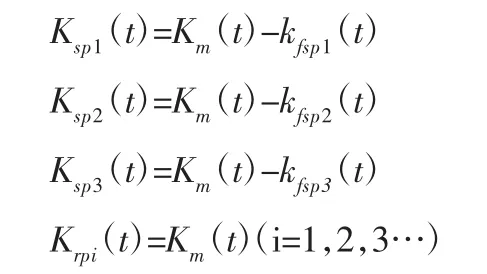
因此太阳轮断齿故障下,各组啮合刚度的表达式为:
4 模型响应分析与试验验证
行星齿轮系统动力学模型的参数设置,如表1所示。
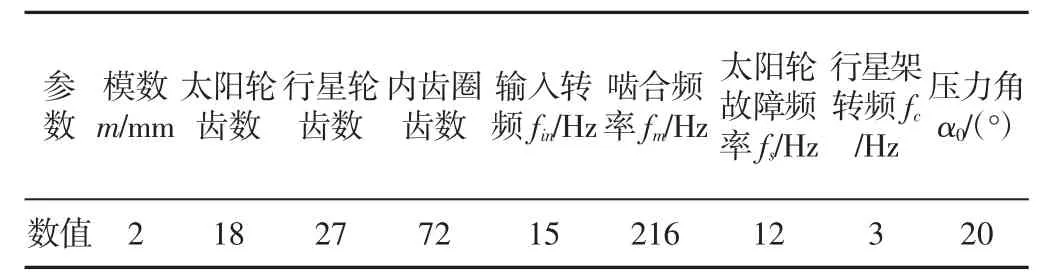
表1 行星齿轮箱参数Tab.1 Planetary Gearbox Configuration Parameters
将表1中的参数与求得的齿轮时变啮合刚度代入动力学模型中,求解得到模型响应信号,经传递路径函数调幅得到最终的模型响应信号,并对该信号作进一步分析,得到行星轮系的模型响应特性。
4.1 模型响应分析
通过动力学仿真,太阳轮断齿故障下模型响应的频谱图,如图6(a)所示。啮合频率附近局部放大的频谱图,如图6(b)所示。
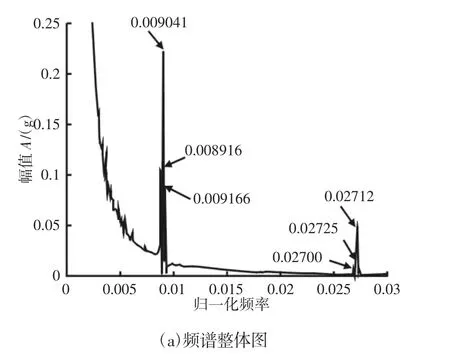
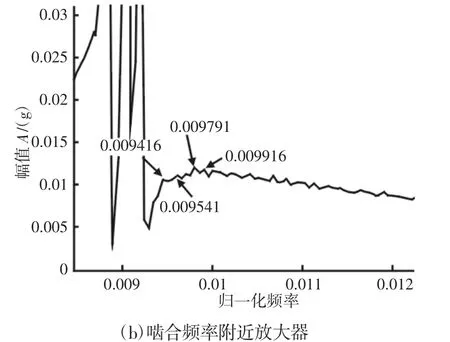
图6 太阳轮断齿时的模型振动响应频谱图Fig.6 Spectrum of Model Vibration Response for Sun Gear Broken
由图6可知,太阳轮发生断齿故障时,由于行星轮公转的调幅效应,频谱图中会出现调制频率为行星架转频的边频带,即处幅值较明显(k,n均为整数),如在归一化频率约0.009041)约0.008916)约0.009166)处的峰值较大。同时频谱中还出现了以太阳轮故障频率为调制频率的边频,如在归一化频率约0.009416)约0.009541)约0.009791)约0.009916)处边带峰值较明显,即频谱图中的幅值出现在归一化频率处(k,m,n均为整数)。
4.2 试验验证
为了验证所建立动力学模型分析结果的准确性,使用的行星齿轮箱故障诊断试验台进行试验验证,如图7所示。行星齿轮箱的参数与表1中的模型参数一致,信号的采样频率为20.48kHz。试验测得的太阳轮断齿故障下响应信号的频谱图,如图8所示。试验实际啮合频率约为216Hz。
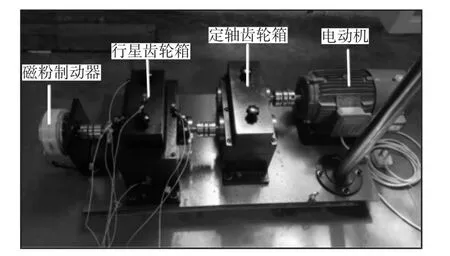
图7 行星齿轮箱故障诊断试验台Fig.7 Planetary Gearbox Fault Diagnosis Test Rig
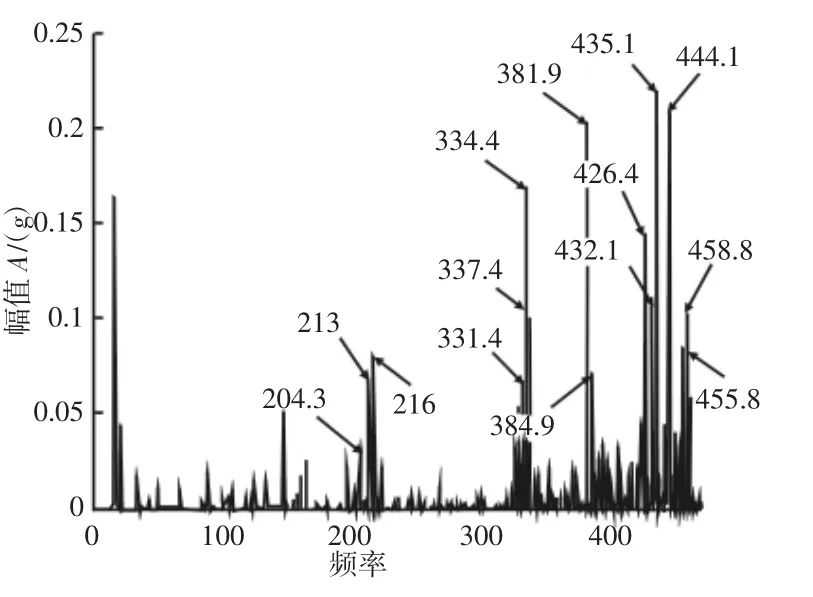
图8 太阳轮断齿时的试验振动响应信号频谱图Fig.8 Spectrum of Test Vibration Response for Sun Gear Broken
由图8可知,在太阳轮断齿故障下,响应信号同时受到太阳轮故障频率fs和行星架转频fc的调制作用,啮合频率及其倍频附近出现调制频率为fc和fs的边频带,如在频率fm-fs(约204.3Hz),fm-fc(约213Hz),2fm-4fs-fc(约381.9Hz),2fm-2fc(约426.4Hz),2fm+fc(约435.1Hz),2fm+fs(约444.1 Hz),2fm+2fs+fc(约458.8Hz)等处幅值比较明显。对比图6和图8可得,动力学模型所得频谱的边频带较小,这是因为行星齿轮系统模型复杂、参数众多,虽然对模型及参数进行了优化,但仍会与实际有一定差距,但动力学模型的频谱响应特性与试验所得结果基本一致,能够反映太阳轮断齿的实际故障状态。
5 结论
(1)建立了考虑振动传递路径时变效应的行星齿轮系统动力学模型,模型考虑了齿轮副啮合综合误差、齿侧间隙等因素的影响;(2)推导了太阳轮断齿故障下齿轮副的时变啮合刚度傅里叶级数表达式,并对所建模型进行求解,得到了太阳轮断齿时系统的频谱响应特性,即太阳轮断齿故障时,频谱幅值出现在kf¯m±(k,m,n为整数)位置处;(3)通过行星齿轮箱故障诊断试验台进行试验,将模型结果与试验结果进行对比,验证了所建立动力学模型的准确性,为行星轮系统的健康监测及故障诊断提供了一定的理论依据。
猜你喜欢
热处理技术与装备(2020年4期)2020-09-03
百科探秘·航空航天(2020年6期)2020-07-09
自动化学报(2019年12期)2020-01-19
中学生数理化·八年级物理人教版(2019年5期)2019-06-25
读者(2018年20期)2018-09-27
智富时代(2017年4期)2017-04-27
智富时代(2017年4期)2017-04-27
北京汽车(2016年6期)2017-01-06
山东工业技术(2016年15期)2016-12-01
少儿科学周刊·儿童版(2016年1期)2016-03-14
