
一种上肢康复机器人的运动仿真与实验研究
2020-03-27 18:17高建设左伟龙于千源
机械设计与制造 2020年3期
高建设,左伟龙,于千源
(郑州大学机械工程学院,河南 郑州 450001)
1 引言
脑卒中又名中风,具有发病以及病情变化迅速的特点,据不完全统计,我国脑卒中的患病率高达336.3/10万人,也是全世界发病率最高的国家之一。随着科学技术的进步,我国脑卒中的死亡率正在逐渐下降,但是患者在经历了脑卒中后会留下诸如偏瘫、手指不灵活、语言交流困难、排便困难等后遗症[1],这些后遗症严重的影响了家庭的幸福与和谐。同时对于脑卒中患者来讲,康复训练进行的时间越晚,患者的肢体恢复希望越小。因此,选择一种有效的康复治疗手段,提高病人的康复能力是目前人们关注的热点问题。医学证明,脑卒中患者可以通过康复训练的方法恢复其肢体运动的基本功能。传统的康复治疗手段存在着医护人员少、工作强度高、治疗费用高、不能获取评定康复结果的有效数据的缺点。因此将康复机器人应用于上肢功能性训练显得十分重要。
上肢康复机器人主要分为两种,一种是末端引导式机器人,一种是外骨骼式机器人。在上肢康复机器人中,文献[2]设计了一台MIT-MANUS机器人,该康复机器人具有反向驱动的特点,主要为患者的肩、肘进行锻炼,但是该康复机器人只能提供二维水平面上的运动。文献[3]开发了一个称为MIME的镜像运动机器人,该康复机器人采用了PUMA机械臂以辅助患者进行康复运动,能够帮助患者进行上肢健康一侧与患病一侧的镜像运动,但是该康复机器人没有后驱动性。文献[4]设计开发了一种低成本的平面机器人,该系统帮助患者使用振动触觉加速其康复治疗。国内对于康复机器人的研究比较晚,其中具有代表性有:清华大学成功研制出一款肩、肘多功能康复训练机器人[5],该机器人可带动患者的上肢完成各种大范围的活动。文献[6]设计了一种康复机械手臂,该手臂采用五连杆驱动机构,可以带动患者的手臂完成康复性动作。哈尔滨工业大学研制出一款外骨骼式康复机器人,该康复机器人有5个自由度,但是不能够实时的检测患者的病情及其康复状况。此外,文献[7]开发出了一种7-DOF的串联结构机器人,文献[8]开发出了一种龙门式的上肢康复训练机器人。
通过上述分析,可以发现研究学者主要集中于串联或者并联机器人,但是对于混联机器人的研究相对较少。以混联康复机器人为研究对象,通过分析“8”字形,“0”字形,“1”字形等几种典型的康复运动曲线,并结合虚拟样机仿真技术以及MATLAB软件,验证了机构的合理性以及轨迹的正确性。对于后续的机器人动力学建模、仿真及结构的优化设计奠定了基础。
2 康复机器人机构分析
新型串并混联康复机器人的结构实体模型,如图1所示。该康复机器人由机架、并联机构、导轨移动副三部分组成。并联机构为2-PRR形式,主要由扇形架和连杆组组成,其中连杆组上端分别通过转动副与滑座相连,下端分别通过转动副与手柄相连,可以上下移动,末端手柄通过轴承和连杆相连接。龙门架上的导轨移动副与并联机构构成混联机构样机,如图2所示。
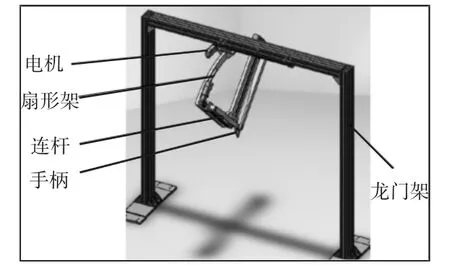
图1 康复机器人三维图Fig.1 Rehabilitation Robot Three Dimensional Map

图2 康复机器人样机图Fig.2 Rehabilitation Robot Prototype Map
3 运动学反解
运动学反解是对机器人进行运动控制的基础。采用D-H方法,建立坐标系,坐标系{0}的原点建立在机架中心,如图3所示。X0轴垂直于纸面向里,Z0轴水平向右。坐标系{A0}与扇形架左半部分相固连,ZA0沿左扇形架方向,XA0垂直于ZA0向上。坐标系{A1}的原点建立在滑块的中心,ZA1沿左扇形架方向,XA1垂直于ZA1与XA0相平行,坐标系{A2}与左连杆相固连,ZA2沿左连杆方向,XA2垂直于ZA2向里,坐标系{H}的原点建立在康复机器人末端手柄中心,同理可以建立右连杆坐标系。相邻连杆之间的参数分别用扭角α、杆长a、连杆偏置d、关节角θ表示,具体参数,如表1、表2所示。
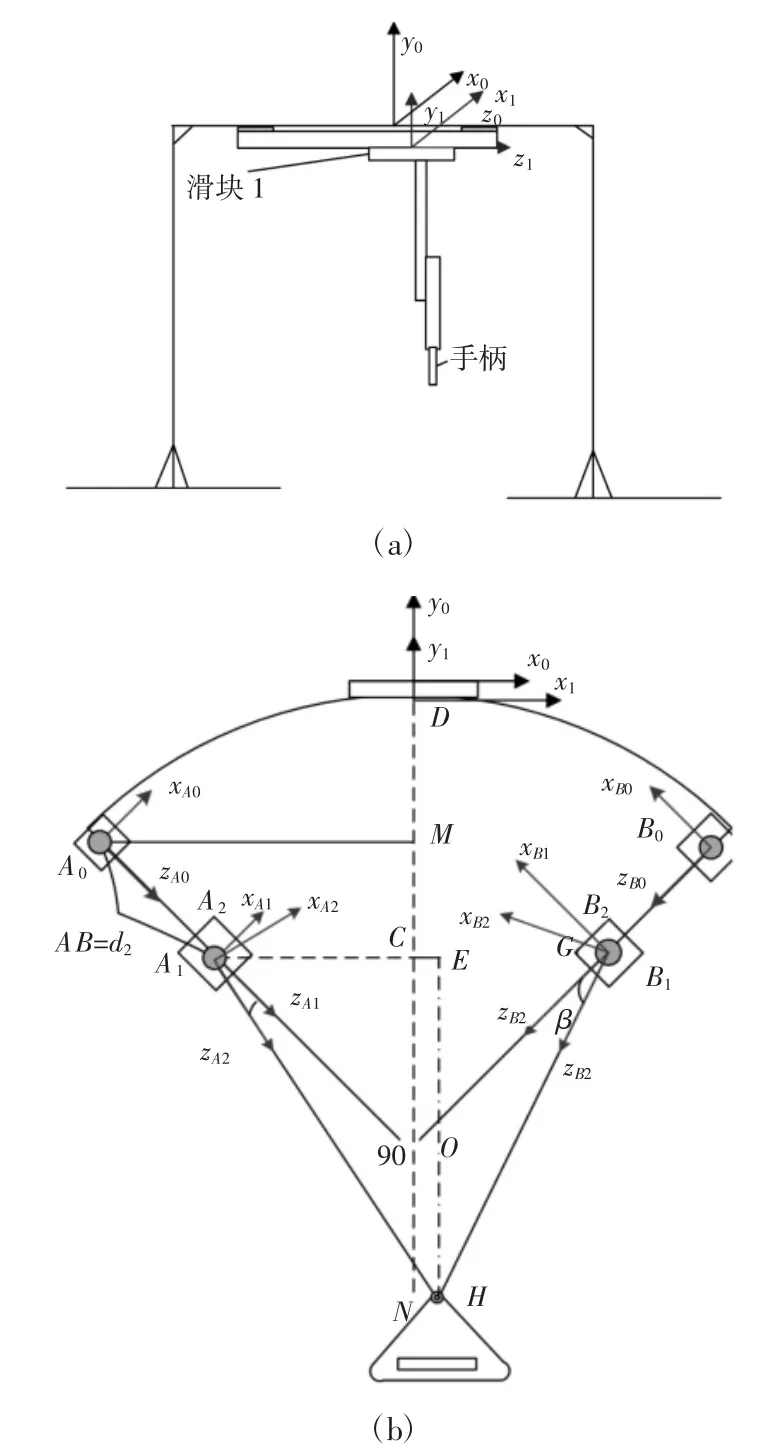
图3 康复机器人的坐标系图Fig.3 Rehabilitation Robot Coordinate System Map
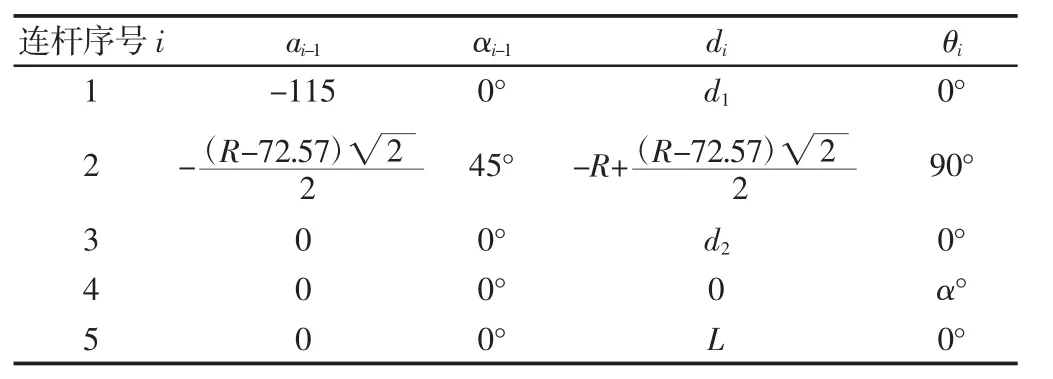
表1 上肢康复机器人左关节变量参数Tab.1 Upper Left Limb Rehabilitation Robot Left Joint Variable Parameters

表2 上肢康复机器人右关节变量参数Tab.2 Upper Right Limb Rehabilitation Robot Left Joint Variable Parameters
根据表1所列的连杆参数,即可得到连杆变换矩阵为:

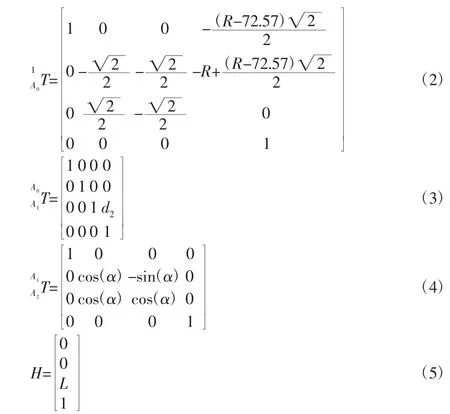
设末端点坐标为 P(x,y,z),将上述式子相乘进行整理,可以得到如下表达式:

同理,根据表2所列的连杆参数,经过一系列坐标变换可以得到如下关系式:
根据选用的导轨型号确定其导程是1mm,则可以得到三个电机转动的函数表达式为:

4 典型运动轨迹仿真
上肢康复训练的实质就是借助上肢康复机器人带动患者的手臂完成康复性动作,从而达到重塑大脑的中枢神经系统的目的。常用的典型运动轨迹有“8”字形、“0”字形、“1”字形,如“1”字形轨迹可以锻炼到肩肘的前伸和屈曲协调运动,“8”字形和“0”字形可以锻炼到肩肘的协调运动和对肢体位置感知能力等[7]。
4.1 “8”字形轨迹仿真与实验
在操作空间xy平面上进行规划,其“8”字形轨迹函数曲线方程如式(9),随后在ADAMS环境中建立康复机器人的虚拟样机模型,添加圆柱副、球副、移动副等约束,如图4所示。根据式(8)计算出每一个关节电机需要的运动曲线,随后在Motions选项中分别选择添加这三个不同的函数表达式,设置仿真时间为10s,仿真步数100。以末端手柄中的圆心作为参考点,可以得到其轨迹,如图4所示。证明了机构运动学反解正确、仿真模型正确。

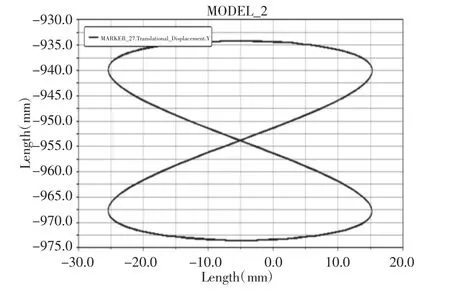
图4 ADAMS仿真出的“8”字形轨迹Fig.4 ADAMS Simulation of the“8”Shaped Trajectory
利用图1所示样本搭建实验平台,实验器材主要有步进电机三台、Trio运动控制器一台、驱动器三台、电源、扇形架、导轨、滑块、手柄、连杆等组成,在搭建完成后一定要确保所搭建的实验平台不产生震颤现象以及所构成的控制系统具有完整性。随后接通电源,打开Trio运动控制器调试界面,将事先编写好的“8”字形运动程序下载进去。为了更直观的显示整个运动轨迹,以末端手柄上的轴承为中心,在其上固定一支水笔,确保整个水笔在运动时不能产生晃动现象,否则会影响整个运动轨迹的精确性。同时,在水笔的前方固定一张白纸,电机的转动将会带动水笔的移动,进而可以看出末端点的运动轨迹。在完成上述准备性工作后,打开开关,按下执行建,整个机构开始良好的运转起来,最终其轨迹示意图,如图5所示。
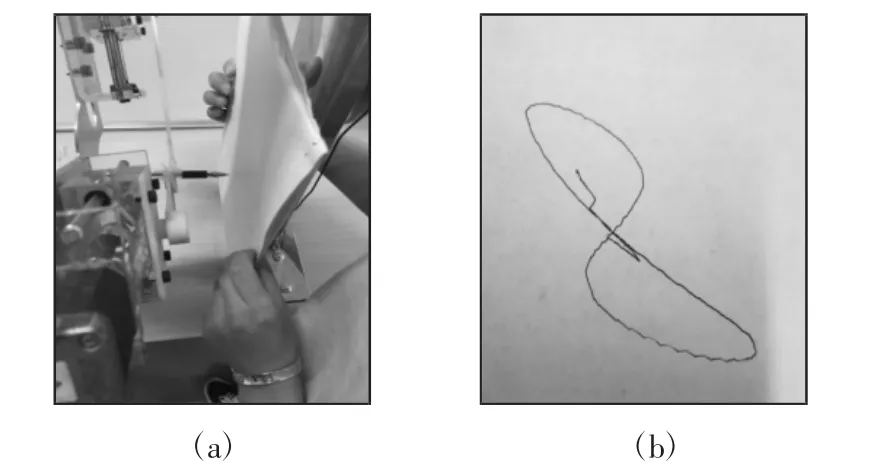
图5 “8”字形运动仿真Fig.5"8"Shaped Motion Simulation
4.2 “0”字形轨迹仿真与实验
规划上肢康复机器人的“0”字形轨迹曲线。其函数方程,如式(10)所示。

按照上述方法在ADAMS中建立康复机器人的虚拟样机模型,根据反解表达式在Motions选项中添加三个不同的动力表达式,设置仿真时间为10s,仿真步数100,可以得到轨迹,如图6所示。同样可以证明机构运动学反解的正确性以及ADAMS模型建立的正确性。以手柄上的中心作为参考点,可以看到其轨迹近似为“0”字形轨迹,其绘制的“0”字形轨迹曲线,如图7所示。

图6 ADAMS仿真的0字形轨迹曲线Fig.6 ADAMS Simulation of the“0”Shaped Trajectory
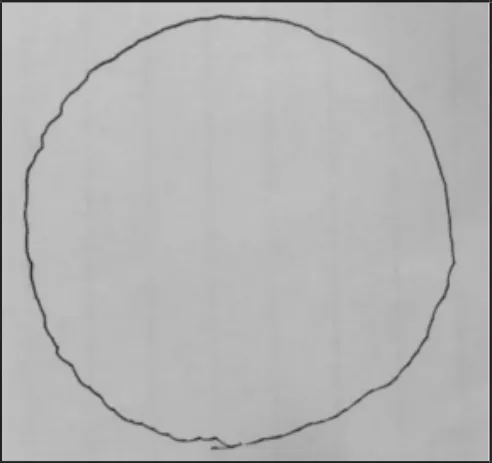
图7 “0”字形运动轨迹Fig.7“0”Shaped Movement Track
4.3 “1”字形轨迹仿真与实验
同理规划上肢康复机器人的“1”字形轨迹曲线,其函数方程式,如式(11)所示。根据反解表达式求得每一个电机需要转动的角度,随后导入到ADAMS中,进行仿真,得到末端轨迹曲线,如图8所示。观察ADAMS的图形,可以看出横坐标的变化范围很小,在误差的允许范围之内。以手柄上的滚珠轴承作为参考点,其绘制的“1”字形轨迹曲线,如图9所示。

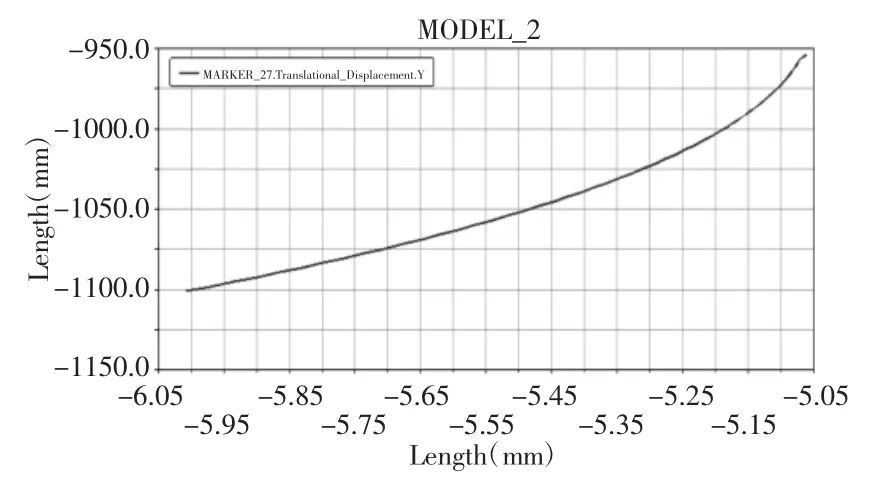
图8 ADAMS仿真的1字形轨迹曲线Fig.8 ADAMS Simulation of the“1”Shaped Trajectory

图9 “1”字形运动轨迹Fig.9“1”Shaped Movement Track
5 结论
针对中风康复训练问题,提出了一种新型的串并混联康复机器人,并对典型的“8”字形、“0”字形,“1”字形康复轨迹进行仿真与实验验证,并在ADAMS中进行虚拟样机仿真,得到了末端运动的轨迹。基于理论分析结果,在机器人实体上进行实验验证。仿真与实验结果表明,本研究所设计的康复机器人机构具有合理性,以及反解运动学模型的正确性。这对于后续动力学的仿真、结构的优化以及控制系统的开发奠定了基础。
猜你喜欢
石油矿场机械(2022年3期)2022-06-17
装备制造技术(2020年11期)2021-01-26
装备制造技术(2020年2期)2020-12-14
三门峡职业技术学院学报(2019年4期)2019-05-20
汉字汉语研究(2019年4期)2019-03-04
电子制作(2018年11期)2018-08-04
小学生学习指导(低年级)(2018年5期)2018-04-24
汽车实用技术(2017年16期)2017-09-21
小学阅读指南·低年级版(2016年5期)2016-05-14
科普童话·百科探秘(2015年5期)2015-05-26
