水下隧道火灾定位及联动灭火技术探析
2020-04-02 08:38吴小丽
工程建设与设计 2020年5期
吴小丽
(招商局重庆交通科研设计院有限公司,重庆 400067)
1 引言
近年来,我国水下隧道的建设发展迅速。水下隧道具有隧道长、断面大、纵坡大、防灾救援问题突出等特点。为保证水下隧道的运营安全,设计人员通常设置完善的通风、照明、消防、排水、监控及供配电系统;课题研究也多集中于通风排烟、人员疏散救援等领域,以制定相应的灾害应对措施。而水下隧道发生火灾时,易造成严重的人员伤亡及巨大的经济损失,及时探测火灾的发生及发生初期快速灭火尤为重要。火灾定位及联动灭火控制技术较复杂,本文对火灾探测技术、火灾定位逻辑关系及联动控制流程等进行探讨、分析,为设计及管理者提供借鉴。
2 火灾定位问题
根据GB 50116—2013《火灾自动报警系统设计规范》,水下隧道应同时采用线型光纤感温火灾探测器和点型红外火焰探测器(或图像型火灾探测器)。采用探测2种及以上火灾参数的探测器,有助于尽早发现火灾。但在发现火灾后,如何确定火灾位置,仍存在一些问题。
1)水下隧道发生火灾,可能存在火灾探测器均未报警、现场人员采用按钮或电话报警的情况,需要由监控值班员通过视频监控摄像机进行火灾位置判断,远程手动开启对应的喷雾灭火设备,对值班员的应变能力、操作能力要求较高,受主观判断影响较大。
2)联动控制方式的联动触发信号采用2个独立的报警触发装置信号的“与”逻辑组合,但2类火灾探测器的报警分区无法从物理上完全保持一致,火灾发生时2类火灾探测器的报警区域可能不同或报警区域有多个,需要判断采用哪一类火灾探测器和哪一个报警区域进行火灾定位。
3)水下隧道报警分区、防护分区数量较多,对应关系较复杂。需要建立报警分区与防护分区之间的对应关系,便于实现对火灾的定位灭火。
3 火灾定位分析
3.1 不同火灾探测器的定位特点
目前,国内常用的火灾探测设备主要包括分布式光纤火灾探测器、光纤光栅火灾探测器、点型红外火焰探测器、图像型火灾探测器。分布式光纤火灾探测器、光纤光栅火灾探测器根据探测环境温度变化进行报警;点型红外火焰探测器通过识别火焰特征光谱和变化频率来发现火灾;图像型火灾探测器是基于数字图像的处理和分析判断火灾[1]。
受探测原理及隧道环境的影响,各类探测器在探测隧道火灾时各有优缺点。
点型红外火焰探测器根据探测原理,可定位火灾发生在某个火灾探测区域,但不能定位到具体的发生点;火焰探测器采用侧墙式安装,需要通过邻近探测器覆盖部分探测区域,以减少探测盲区;探测效果受遮挡、探测器污染的影响较大,受风速影响较小;探测分区即报警分区,通过硬件设备(一般间隔不大于50m)进行分隔、定位。
图像型火灾探测器可利用摄像机已知的内部参数水平视场角、垂直视场角和焦距计算得到报警图像中火灾发生点相对于摄像机光轴的偏转角度,然后根据摄像机外部参数安装高度和安装俯仰角度计算得到火灾实际发生位置[2]。图像型火灾探测器可实现火灾的定位,安装方式与火焰探测器类似。车辆遮挡对探测效果影响较大,探测器受污染程度影响次之,受风速影响较小。探测分区通过硬件设备(一般间隔不大于100m)进行分隔,再结合软件进行报警定位。
光纤光栅火灾探测器纵向布设在隧道顶部,设置间距不大于10m,可实现火灾的定位。每个火灾探测链路相对独立,探测分区通过硬件设备(一般探测链路长100m、200m、400m)进行分隔,再结合软件进行定位。光纤光栅火灾探测器的探测效果受遮挡、污染影响较小,受风速影响较大。
分布式光纤火灾探测器沿隧道全长敷设,理论上可实现火灾的定位。但探测分区通过软件进行划分,与硬件设备的关联性差,报警分区可能存在“漂移”,与火灾实际发生位置存在偏差。分布式光纤火灾探测器的探测效果受遮挡、污染影响较小,受风速影响较大。
根据隧道全尺寸火灾探测试验[3],基本验证了图像型火灾探测器、双波长火灾探测器及线型光纤感温火灾探测器对火灾进行定位的特点。
3.2 报警逻辑关系
通过对目前几种常用火灾探测器特点及定位功能的分析,水下隧道火灾自动报警系统推荐采用“图像型火灾探测器+光纤光栅火灾探测器”或“点型红外火焰探测器+光纤光栅火灾探测器”,由于火灾报警触发装置还应考虑手动报警按钮,因此,可实现联动功能的火灾报警装置的组合形式有以下几种情况(见表1、表2)。
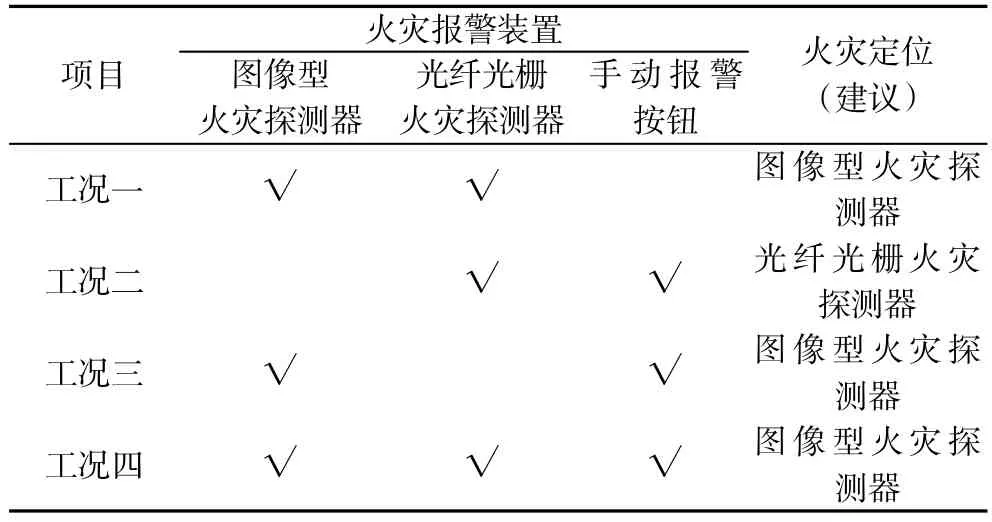
表1 火灾报警装置的组合表
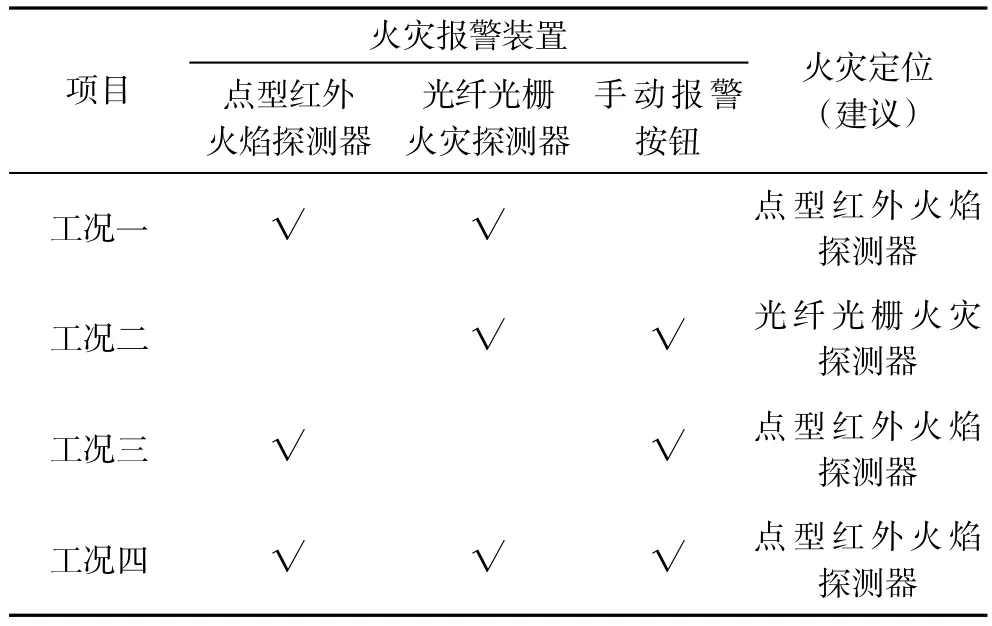
表2 火灾报警装置的组合形式之一
在火灾报警及联动控制软件平台,根据各火灾报警装置的逻辑关系,建立报警分区与防护分区的对应关系。发生火灾时,确定一个报警分区作为火灾发生位置后,联动与之关联的泡沫水喷雾控制阀箱进行灭火。
对于只有一类火灾探测器报警、手动报警按钮报警及人员报警的情况,不能触发联动灭火控制。由监控值班员结合视频监视信息进行确认,若未发生火灾,则不作处理,报警系统复位;若发生火灾,则根据火灾位置进行灭火处理。也可能发生火灾而无报警的情况,因此,视频监控摄像机设置时,应尽可能与防护分区保持一致,便于确定灭火位置[4]。
4 报警控制流程
火灾报警控制器处于手动模式时,当火灾探测器、手动报警按钮任一装置发出报警时,监控人员通过视频监控确认火灾信息,确认发生火灾后,可通过手动控制盘、监控软件平台或现场打开相应的火灾区域及其左右相邻的2个防护分区的泡沫-水喷雾控制阀箱中的雨淋阀电磁阀和泡沫电磁阀。此时供水管道压力下降,水喷雾主泵启动供水;同时,泡沫原液管道压力下降,泡沫泵工作供应泡沫。泡沫原液经比例混合器混合后,通过专用泡沫-水喷雾喷头向启动3个防护分区喷泡沫-水喷雾灭火(见图1)。
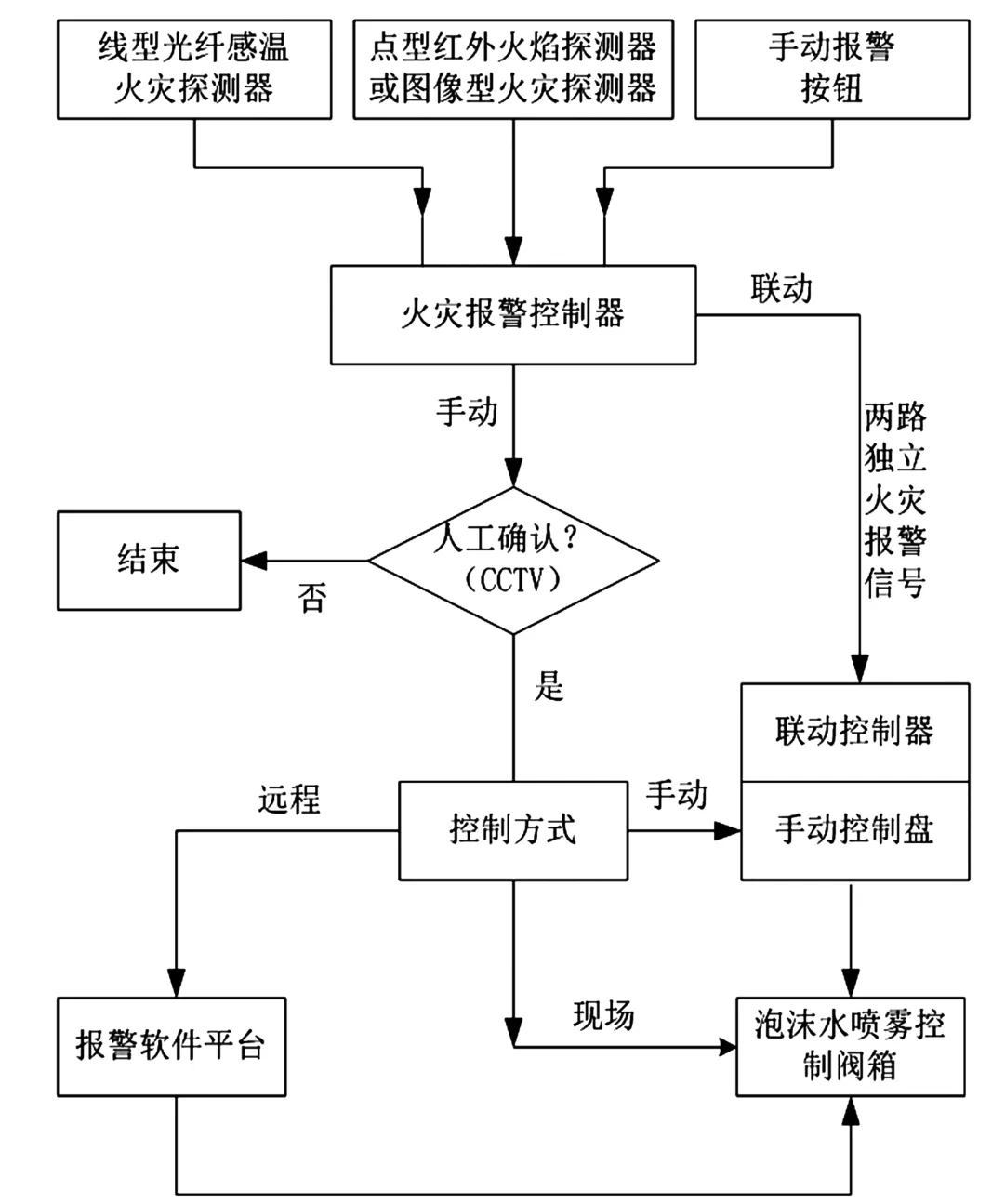
图1 火灾报警联动控制流程图
火灾报警控制器处于联动模式时,当满足联动触发信号时,联动控制器联动喷雾系统进行灭火[5]。
5 应用实例
5.1 泡沫-水喷雾联用灭火系统
以某市水下双向6车道隧道为例,泡沫-水喷雾联用灭火系统设置的泡沫水喷雾控制阀箱间距为25m,喷头间距为5m,每25m长为一个泡沫-水喷雾防护区间(见图2)。当水下隧道内发生火灾时,根据火灾报警系统、摄像机等定位的火灾位置,消防联动控制器联动相应的火灾区域及左右相邻的2个防护分区的喷头共3组喷头进行灭火。即当火灾定位分区N发生火灾时,启动分区N-1、分区N及分区N+1的喷水装置进行灭火。
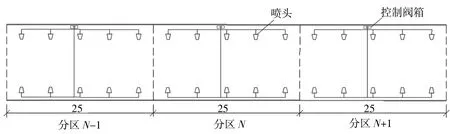
图2 某水下隧道喷头及泡沫水喷雾控制阀箱布置图(单位:m)
5.2 火灾报警系统
该项目火灾报警系统采用“图像型火灾探测器+光纤光栅火灾探测器”的方式。
图像型火灾探测器设置在隧道行车方向右侧,单侧间距75m,报警分区为25m,平面布设位置基本与泡沫-水喷雾防护区间保持一致(见图3)。图像型火灾探测器探测到火灾时,将视频信息、报警信息上传至图像火灾报警管理平台,在管理平台可查看实时图像、报警信息、报警画面/视频,并能对现场图像型火灾探测器进行远程管理。探测器报警信号通过传输模块上传至火灾报警控制器。
光纤光栅火灾探测器在隧道拱顶设置2条探测链路,光纤光栅火灾探测器间距为5m,报警分区为25m,每个探测链路长100m(见图4)。光纤光栅火灾探测器探测到火灾时,将报警信号上传到光纤光栅信号处理器,再通过传输模块上传至火灾报警控制器。
发生火灾时,若图像型火灾探测器和光纤光栅火灾探测器报警分区均为分区N,则火灾定位到分区N,启动分区N-1、分区N及分区N+1的喷水装置;若图像型火灾探测器和光纤光栅火灾探测器报警分区不同,则主要依据图像型火灾探测器进行定位,辅助视频监控的图像进行确认,开启相应的喷水装置。
以上示例为固定火源的情况下,火灾报警系统及报警区域的示意。
6 结语
1)根据不同火灾探测器的特点,水下隧道火灾探测建议采用“点型红外火焰探测器+光纤光栅火灾探测器”或“图像型火灾探测器+光纤光栅火灾探测器”。
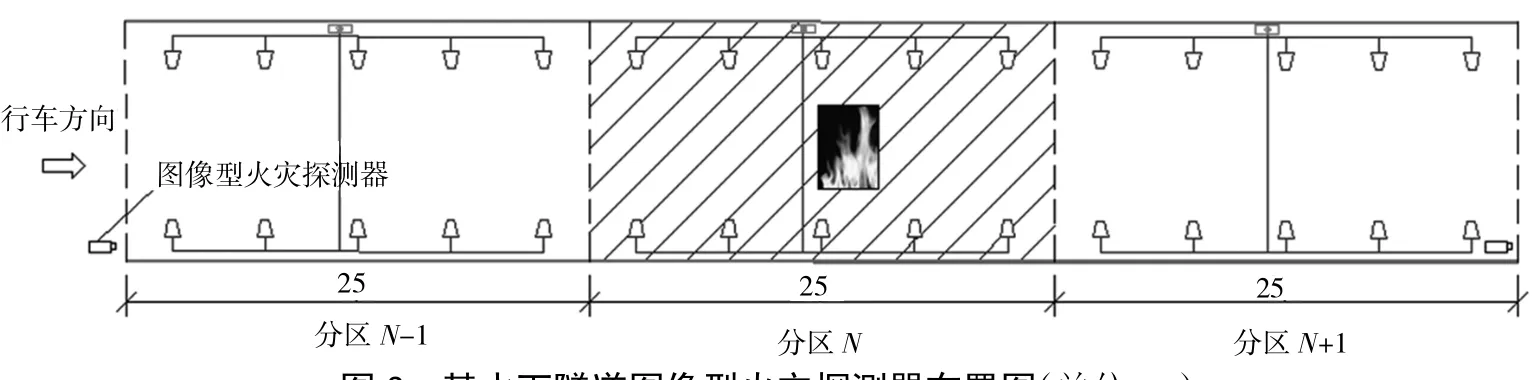
图3 某水下隧道图像型火灾探测器布置图(单位:m)
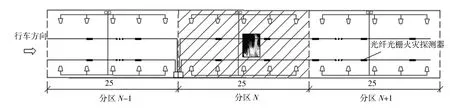
图4 某水下隧道光纤光栅火灾探测器布置图(单位:m)
2)视频监控摄像机设置位置尽可能与防护分区对应,设置间距按防护分区倍数关系考虑。在发生火灾而未报警的情况下,有利于监控值班员判断开启灭火装置的区域。
3)点型红外火焰探测器、光纤光栅火灾探测器及图像型火灾探测器的报警分区尽可能与防护分区对应,使火灾定位的逻辑关系进行简化。
4)若火灾报警系统达到联动报警要求,系统则根据建立的报警定位逻辑关系,综合确定报警分区,联动对应的灭火装置。
5)鉴于水下隧道运营安全的重要性,建议运营管理时采用火灾定位后由监控值班员确认后实施控制的方式。
猜你喜欢
大学物理(2022年7期)2022-07-26
大众科学(2022年5期)2022-05-18
环球时报(2022-03-29)2022-03-29
小学科学(2020年1期)2020-02-18
百科探秘·航空航天(2020年12期)2020-01-22
电子制作(2019年24期)2019-02-23
小学科学(2019年12期)2019-01-06
知识经济·中国直销(2018年7期)2018-07-27
北方交通(2016年12期)2017-01-15
人间(2015年11期)2016-01-09