基于S7-200PLC的两种交通灯控制方案
2020-04-07 15:25田程张雨生青岛工学院机电工程学院
数码世界 2020年3期
田程 张雨生 青岛工学院 机电工程学院
1 概述
1.1 可编程控器概述
可编程控制器(简称PLC)是以微处理器为基础的通用工业控制装置,其应用面广、功能强大、使用方便,已经广泛地应用在各种自动化控制系统中。同时PLC仍然处于不断发展之中,其功能不断增强,更为开放,它不但是单机自动化中应用最广的控制设备,在大型工业网络控制系统中也占有不可动摇的地位。其中的S7-200PLC具有极高的可靠性、丰富的指令集和内置的集成功能、强大的通信能力和品种丰富的扩展模块。PLC可以单机运行,用于代替继电器控制系统,也可以用于复杂的自动化控制系统。S7-200以其极高的性价比,在国内占有很大的市场份额。
1.2 梯形图经验设计法
梯形图经验设计法是在一些典型电路的基础上,根据被控对象对控制系统的具体要求,通过不断地修改梯形图而得到最适宜的控制方案。这种方法没有普遍的规律可寻,具有很大的试探性和随意性,最后的设计结果不是唯一的。
1.3 顺序控制设计法
顺序控制设计法,就是按照生产工艺预先规定的顺序,在各个输入信号的作用下,根据内部状态和时间顺序,在生产过程中各个执行机构自动地、有序地进行操作。在使用顺序控制设计法时,首先根据系统的工艺过程,画出顺序功能图,然后根据顺序功能图画出梯形图。其中的顺序功能图是描述控制系统的控制过程、功能特性的一种图形,并不涉及所描述的控制功能的具体技术,是一种通用技术语言。
2 交通灯程序设计
2.1 设计要求
第一,启动开关接通后,系统开始正常工作,东西方向红灯和南北方向绿灯常亮10s;第二,10s过后,东西方向红灯变为东西方向黄灯,与南北方向绿灯闪亮5s;第三,闪亮过后,东西方向绿灯和南北方向红灯常亮10s;第四,10s过后,南北方向红灯变为南北方向黄灯,与东西方向绿灯闪亮5s;第五,在没有接通停止开关时,重复以上动作。
2.2 I/O口分配

数目 符号 地址1启动开关 I0.0 2 停止开关 I0.1 3东西方向红灯 Q0.0 4东西方向黄灯 Q0.1 5东西方向绿灯 Q0.2 6南北方向红灯 Q0.3 7南北方向黄灯 Q0.4 8南北方向绿灯 Q0.5
3 交通灯程序设计
3.1 经验设计法
3.1.1 梯形图

3.1.2 程序说明
经验设计法通过接通延时定时器与比较指令的综合应用,满足了交通灯的设计要求。当启动开关(I0.0)接通时,通过启动-保持-停止程序,使中间继电器M0.0线圈上电,同时常开触点M0.0闭合,系统开始正常动作,当停止开关(I0.1)接通时,线圈M0.0掉电,同时触点M0.0保持常开状态,系统处于停止状态;
由设计要求可知交通灯一个工作周期为30s,所以可以用接通延时定时器T37,并预设30s时间,在没有停止开关(I0.1)接通的情况下,30s后的T37线圈动作,同时使常闭触点T37断开,将T37复位,同时又开启下一个工作周期。
通过各导线上的比较触点,引导能流在相应的时间段内接通各个线圈,并动作。其中SM0.5是特殊存储器位,提供ON/OFF个0.5s、周期为1s的时钟脉冲,为交通灯闪亮指令。
3.2 顺序控制设计法
3.2.1 顺序功能图
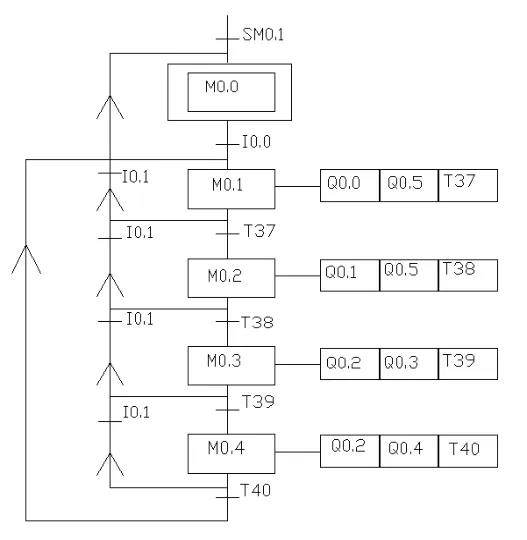
3.2.2 顺序功能图说明
SM0.1位特殊存储器位,仅在首次扫描时为ON,可以用于初始化。T37,T38,T39,T40为接通延时定时器,其中T37与T39的预设值为10s,T38 与 T40 的预设值为 5s。M0.0,M0.1,M0.2,M0.3,M0.4为中间继电器,在顺序功能图中代表步。I0.0,I0.1,T37,T38,T39,T40为每一步的转换条件,当转换条件的前级步为活动步,转换条件满足时,则下一步为活动步,前级步变为不活动步。
开始时,SM0.1将M0.0置为活动步,后级步置为不活动步。当启动开关(I0.0)接通时,M0.1为活动步,M0.0位为不活动步,同时Q0.0与Q0.5上电,T37开始定时;10s后,满足转换条件,常开触点T37闭合,M0.2为活动步,M0.1为不活动步,同时 Q0.1与 Q0.5上电,T38开始定时;5s后,满足转换条件,常开触点T38闭合,M0.3为活动步,M0.2为不活动步,同时Q0.2与Q0.3上电,T39开始定时;10s后,满足转换条件,常开触点T39闭合,M0.4为活动步,M0.3为不活动步,同时Q0.2与Q0.4上电,T40开始定时;5s后,满足转换条件,常开触点T40闭合,M0.1位活动步,M0.4为不活动步,再进入下一个工作周期。在上述工作周期内,任意时刻接通停止开关(I0.1),均可使前级步为不活动步,使M0.0为活动步,从而使系统进入初始状态。
通过顺序功能图可以很方便的转化为梯形图,其中交通灯闪烁也是由特殊存储器位SM0.5指令实现。
4 结语
通过对同一个控制任务运用不同的控制方法,可以充分体现出工业控制的方法多样性。顺序控制设计方法是一种先进设计方法,适用于对复杂控制方案的设计,在设计PLC控制程序时,应该首先使用顺序控制设计方法,提高工作效率。但顺序控制设计方法的先进性并不代表它的简洁性。从上述例子可以看出,通过顺序功能图转换而来的梯形图需要15个网络,而通过经验设计法,只需4个网络,比顺序控制设计法更加简洁。
猜你喜欢
电子技术与软件工程(2021年12期)2021-09-23
电子制作(2019年24期)2019-02-23
新生代(2018年24期)2018-11-13
环球时报(2018-10-15)2018-10-15
儿童故事画报·发现号趣味百科(2017年9期)2018-03-13
科学与财富(2017年9期)2017-06-09
科技资讯(2016年28期)2017-02-28
科学与财富(2016年28期)2016-10-14
考试周刊(2016年51期)2016-07-11
现代职业教育·高职高专(2016年7期)2016-07-09