
一种激光三角测距光学系统的设计方法
2020-04-07 03:44祁伟光
科学大众 2020年1期
祁伟光

摘 要:文章提出了一种基于ZEMAX、TRACEPRO及Matlab的激光三角测距光学系统的设计方法。首先利用ZEMAX进行光学设计,通过设置多重结构、加装光阑和配置优化函数的方法使成像光斑呈轴对称分布,然后利用TRACEPRO光线追迹功能仿真设计结果,最后通过Matlab编程计算,评估光学系统的性能。最终实际测量结果与设计的光学性能一致,表明此设计方法是可行的。本设计不仅解决了三角测距在检测黑、白板卡有差异的行业痛点,还提供了一种能快速验证、快速评估系统测量性能的检验手段。利用此方法将极大地缩短三角测距产品开发的光学设计周期,降低项目失败的风险。
关键词:优化函数;激光三角测距光学系统;光学设计
随着激光技术、基础元器件的发展,光学测量在近现代科学研究、工业生产、建筑工程等领域发挥着越来越重要的作用。激光测距是光学测量中重要的组成部分[1]。利用激光进行测距的应用原理很多,如利用激光飞行时间(Time of Flight,ToF)测距[2],利用调制激光信号的相位测距[3-4],利用物像关系的激光三角测距[5]和利用相干光干涉方法的高精度测量[6]等。激光三角测距以其分辨率高、速度快、非接触的特点在工业检测领域有广泛的应用。特别是近几年,随着基础器件性能的提升,激光三角测距传感器的稳定性[7]和重复精度都得到了很大的改善,同时,利用算法可以使测量精度达到亚像素级别[8-9]。随着物料成本的降低,激光三角测距传感器在许多场合能够取代传统的光电传感器,提供更好的检测性能。
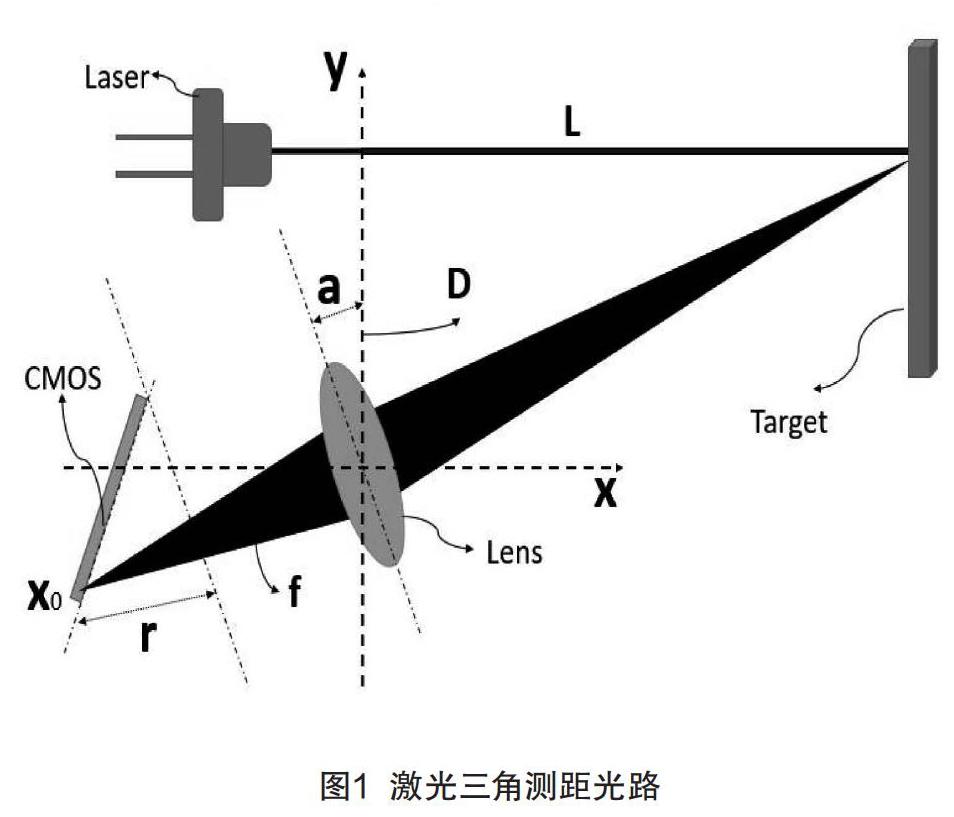
激光三角测距传感器是采用激光器发射,当遇到物体后反射回来,成像在CMOS图像传感器上,不同距离的目标物反射光线成像位置不同,如图1所示。
以透镜中心o为原点,激光发射模块射出方向为x轴正方向建立右手直角坐标系,其中与透镜光轴与y轴的夹角为a,CMOS相对于透镜平面的偏角为r,以透镜中心为起点,垂直于透镜平面向CMOS方向做垂线,交CMOS于x0(对应的像素点序号为M),线段长度为f,激光发射模块至透镜中心的距离为D,根据CMOS检测器上光斑的像素中心相对于参考像素点M的偏移量就可以求得目标物距传感器的距离L。
首先,在建立的xoy直角坐标系中,用已知参数表示x0的坐标位置(f·cos a,f·sin a),进一步可表达E点的坐标为:
进一步推导,三角测距的距离与像素位置x的关系如下:
其中,D0为单个像元在沿着CMOS排列方向上的尺寸。若透镜中心距离测量起点距离为L0,则上式需变为:
1 基于ZEMAX的光学系统设计
文章基于ZEMAX的多重结构进行激光测距光学设计,主要是接收部分的光学系统设计。在软件中,保持物高不变,通过多重结构改变物体到透镜的距离,而不是假设入射光束是平行光,改变视场角的方法来进行光学镜头的对比。由于近处物体反射的光线并不能等效为理想的平行光,因此这样的思路更贴近实际。在优化透鏡的时候,需要考虑光斑的对称性,保证在不同积分时间、不同反射率的物体,也能够保持成像的中心不变。设计时经常遇到光斑能量集中在光斑外围,且下方的能量密度高于上方的能量密度,导致成像光斑沿x方向中心线不对称。定义优化函数,研究团队关心的是在y方向即子午平面上的光斑尽可能小,能量集中,因此在选择优化目标时选择“Y SPOT”。同时为了改善光斑不对称的问题,在优化函数中,使用“COMA”控制彗差。由像差理论[10]可知,彗差的大小与光圈、视场有很大的关系,为了减小彗差,得到更好的成像效果,需要在透镜后方0.5 mm处设置矩形光阑,减小y方向的光圈。多次调整,进行参数优化。优化效果如图2—3所示。
可见改进后的光斑能量集中,光斑分布均匀,成像光斑沿x方向中心线对称分布。这说明以上的设计达到了预期的目标。
2 仿真与实际测试结果对比分析
2.1 基于TRACEPRO的光学仿真
ZEMAX作为光学设计工具,分析成像系统的效果时把激光光斑作为一个理想的光点考虑。实际上光斑是有一定大小的,因此需要用专业的光线追迹软件对系统进行仿真,确定成像效果。文章使用TRACEPRO软件对系统进行仿真,仿真前需要对光学系统设计合理的镜架,镜架结构2D示意如图4—5所示。使用此光学结构仿真,结果如图6—7所示。
相比之下,进行ZEMAX优化后的系统确实能够使光斑对称,能量分布趋于高斯分布。
2.2 样机的测试结果
根据设计的结果,将优化前后系统分别制作出样机1和样机2,如图8所示。
为了验证光学设计和仿真的真实性,通过更改积分时间,对比优化前后的效果。
首先用样机1进行测试,使用黑色板卡,置于传感器80 mm的位置,改变CMOS的积分时间,在CMOS上探测到的波形绘制于如图9所示。用样机2进行测试,在CMOS上探测到的波形绘制于如图10所示。
将采集到的波形用灰度质心算法[11-12]计算得到其像素中心,积分时间和像素中心的对应关系如表1所示。
由以上数据可见,当系统的积分时间变小,CMOS的信号幅度也随之减小,像素中心发生偏移。样机1的像素中心偏移为16个像素,样机2的像素中心没有偏移。
通过以上实验可以看出:利用TRACEPRO仿真得到的结果与实测结果一致,仿真可信。同时,实测也可以证明,利用ZEMAX设计的光学系统能够减小系统的光斑不对称的问题,改善信号幅度对测量结果的影响。典型的应用场合是当目标物反射率变化时,使用ZEMAX优化后的光学系统,能够保证像素中心漂移较小,对应的距离变化也较小,从光学上解决了传感器行业常见的黑白色差的问题。
2.3 基于Matlab的系统性能评估
针对ZEMAX优化后的光学系统,将第2节ZEMAX的设计参数带入第1节所推导的公式,可以计算实际像素中心所对应的距离值。利用Matlab计算得到的设计数据与实测数据对比,如图11所示,设计结果与实测结果基本吻合。
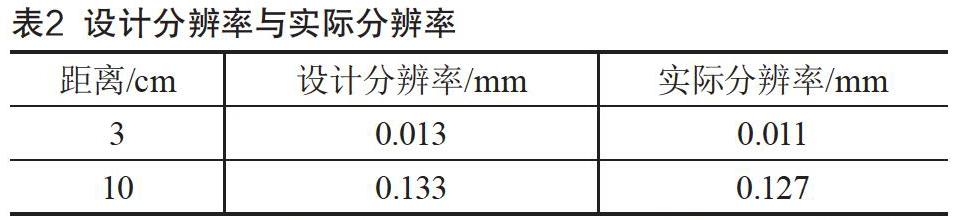
表2是设计的分辨率与实际分辨率的大小,实际分辨率比理論计算值略高,可能是实际样机与理论模型在尺寸上有偏差导致的。
由以上对比可知,利用Matlab可以准确地评估三角测距系统的性能。
3 结语
文章提出了一种基于光学设计、仿真、数值计算软件的激光三角测距光学设计方法。实验表明,此方法不仅从光学设计角度克服了三角测距在检测黑、白板卡有差异的行业痛点,还提供了一种能快速验证、快速评估系统测量性能的检验方法。利用此方法将极大地缩短三角测距产品开发的光学设计周期,降低项目失败的风险。
[参考文献]
[1]李秀华,庄新,宋立明.激光测距技术探究[J].长春工程学院学报(自然科学版),2012(4):39-41.
[2]郭宁博,陈向宁,薛俊诗.基于飞行时间法的红外相机研究综述[J].兵器装备工程学报,2017(3):152-159.
[3]李晨光.相位式激光测距系统的研究[D].长春:长春理工大学,2011.
[4]贾方秀,丁振良,袁锋.相位法激光测距接收系统[J].光学精密工程,2009(10):2377-2384.
[5]王晓东,赵杰.一种新型激光测距传感器的设计与研究[J].传感器技术,1994(6):26-29.
[6]A V TIKHONRAVOV,P W BAUMEISTER,K V POPOV.Phase properties of muhilayers[J].1997(19):4391.
[7]RAINER G DORSCH,GERD HAUSLER.Laser triangulation fundamental uncertainly in distance measurement[J].Applied Optics,1994(7):1306-1314.
[8]孙军利,赵辉,陶卫.具有亚像素级定位精度的激光三角测距新算法[J].激光杂志,2006(4):22-23.
[9]吴剑锋,王文,陈子辰.激光三角法测量误差分析与精度提高研究[J].机电工程,2003(5):89-91.
[10]А П ГРАММАТИН,А С ФИЛОНОВ,孙振洲.中心偏引起的彗差和[J].应用光学,1985(6):21-24.
[11]邹小平,苏显渝,张启灿.激光片光三维传感中提高深度分辨率的方法[J].激光技术,2004(2):196-198,224.
[12]赵建林,郝建华,李恩普,等.提高CCD在激光三角测距中分辨率的方法[J].光子学报,1997(11):998-1002.
