
轮式移动机器人瞬态模型鲁棒自适应同步终端滑模编队控制
2020-04-11 13:52赵东亚崔文豪严星刚
控制理论与应用 2020年2期
赵东亚,崔文豪,严星刚
(1.中国石油大学(华东)化学工程学院,山东青岛 266580;2.肯特大学工程技术与数码学院,英国坎特伯雷CT2 7NZ)
1 引言
近年来,多机器人系统协调编队问题由于其广泛的应用背景受到越来越多的关注[1].多移动机器人系统具有较强的灵活性及自主性,在地理勘测、侦查救援、无人机编队以及协同运输等领域都有着较好的实际应用[2–7].为了完成上述领域中的任务,需要对多移动机器人系统采用高效的控制方法.
目前,多机器人的编队控制算法主要包括图论法[8–11]、基于行为法[12–13]、虚拟结构法[14–16]和领航–跟随法[17–23]等.图论法可对多机器人通讯拓扑结构进行建模.基于行为法实现简单,适用于不确定环境.但编队精度差且很难进行精确的数学分析;虚拟结构法和领航跟随法分别需要虚拟结构和领航机器人全状态信息,在此基础上设计相关算法策略实现编队控制.而在许多情况下,移动机器人在追踪其自身期望轨迹之外,还需实现与其他机器人之间的运动同步.1980年密歇根大学针对双轴运动平台率先提出交叉耦合同步控制方法[24].同步控制通过定义位置误差及同步误差得到交叉耦合误差,进而设计同步控制器使3种误差收敛到零,从而使机器人追踪自身期望轨迹的同时实现与其他机器人的运动同步.文献[25–26]提出了一种同步控制策略来解决编队控制问题.同步控制因其控制结构简单、控制效果易实现等优势,在多轴系统、多机械臂系统中都得到了广泛应用.
文献[27]在使用上述同步控制的基础上结合图论法,提出两种多机械臂任务空间同步控制算法,并证明所提出算法能分别实现渐进收敛和有限时间收敛.文献[28]提出了一种轮式移动机器人非线性不确定运动学瞬态模型,并针对外部干扰及未知参数变化问题提出一种基于扩展状态观测器的单台机器人自适应滑模控制.与文献[27]相比,本文将交叉耦合同步控制应用于多轮式移动机器人协同编队系统,设计了一种双向环形通讯拓扑,且本文考虑了系统集总参数不确定性并设计鲁棒控制克服不确定性的影响.与文献[28]相比,本文对该瞬态模型中心偏移d的状态方程进行了完善,避免了一般形式移动机器人运动学模型中多输入耦合的问题,并将瞬态模型应用于由n个移动机器人组成的系统中.与文献[28]中控制系统渐进稳定相比,本文结合终端滑模控制算法实现系统有限时间稳定.
2 问题描述
图论是一种能清晰完整地描述移动机器人之间通讯拓扑的数学工具.令G=(V,ξ)表示一个无向图,其中:V={v1,v2,···,vn}表示由n个节点组成的节点集,ξ ⊆V×V表示边的集合.如果(vi,vj)∈ξ则表示机器人i与机器人j能够相互通讯.定义A=[aij]表示无向图G的加权邻接矩阵,其中aij表示vi与vj之间的连接权重,其值定义为

定义对角矩阵B=diag{b1,b2,···,bn}其中i=1,2,···,n,则无向图G的拉普拉斯(Laplacian)矩阵L定义为

2.1 轮式移动机器人运动学模型
考虑由n台轮式移动机器人组成的系统.每个机器人由两个差动驱动轮和两个全向从动轮组成,每个驱动轮受各自直流伺服电机控制.
如图1所示.假设在某瞬时时刻t时,机器人几何中心O正沿图中虚线圆围绕一瞬时中心A进行转动.Ra表示此时刻机器人绕A点转动的曲率半径;v1和v2分别为左右驱动轮的前进速度.

图1 运动学模型Fig.1 The kinematics model
两驱动轮中心的速度为

假设u1,u2分别为左右驱动轮直流电机电枢电压,Tm为电机机械时间常数,Kd为电机反电动势常数,r为驱动轮半径,i为减速齿轮传动比,Ks为移动机器人驱动增益,则Ks可表示为

由直流伺服电机特性可以得到以下传递函数:
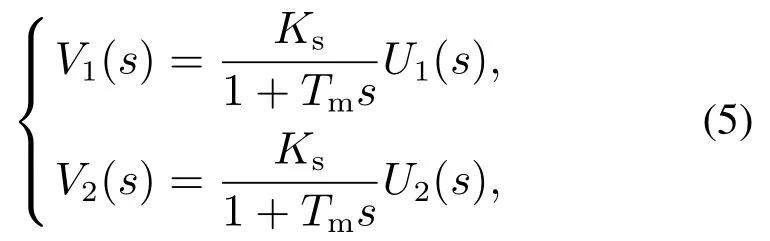
其中V1(s),V2(s),U1(s),U2(s)分别为v1,v2,u1,u2的拉普拉斯变换.
由于移动机器人当前路径与期望轨迹之间存在误差,因此需要给直流电机增加或减去一部分纠正电压∆u,则u1,u2可表示为
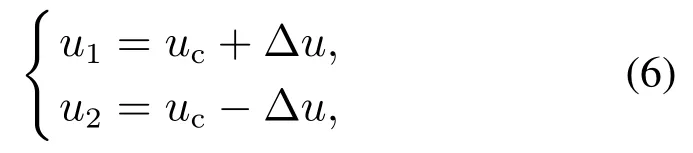
其中uc表示直流电机能够驱动机器人保持速度vc进行运动的基准电压.
则左右驱动轮的前进速度表示为
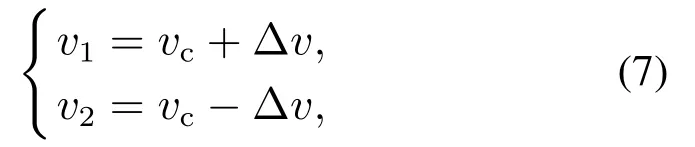
其中∆v表示驱动轮的前进速度纠正量.
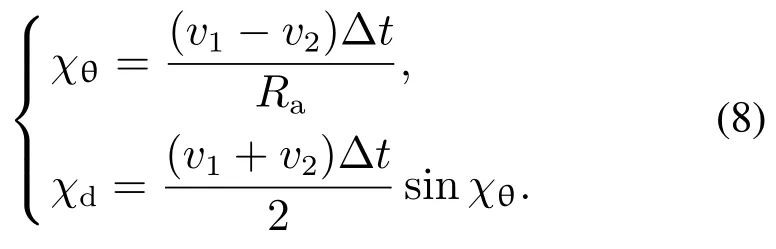
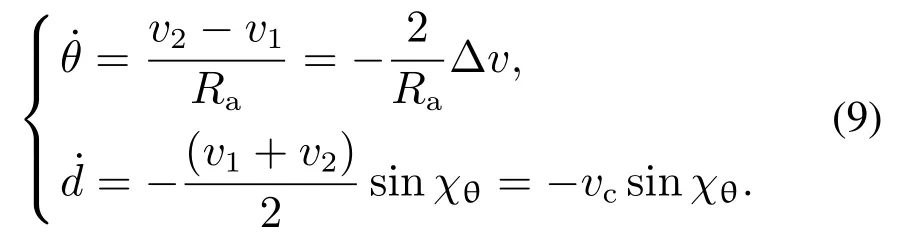
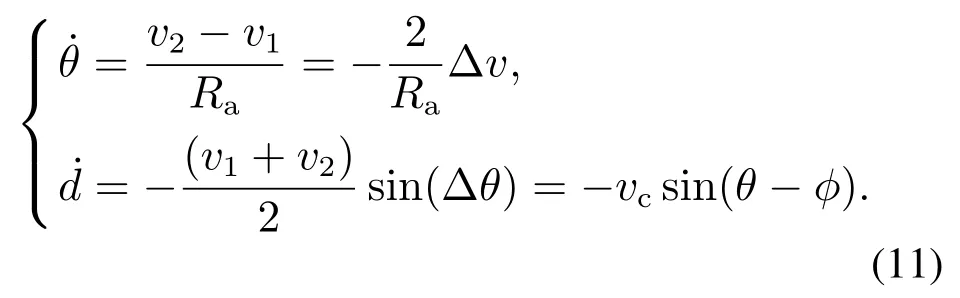
图1中:θ为机器人航向角;点p为期望轨迹上的参考点;d为移动机器人几何中心O与p点之间的中心偏移距离;ϕ为p点的切线角.在一段很短的时间间隔∆t内,χθ和χd分别表示θ和d的变化量.则从图1所示的几何关系可得
若期望轨迹如图1所示,当∆t→0时,χθ,χd均为减小量的绝对值,∆θ=−χθ<0,∆d=−χd.因此可得到以下微分方程:
若期望轨迹位于机器人上方,当∆t→0时,χθ为增大量的绝对值,则χd为减小量的绝对值,∆θ=χθ>0,∆d=−χd.但此时由于机器人在纠正电压的作用下转动方向与图1相反,因此∆v <0,故微分方程仍如式(9)所示.
由于移动机器人追踪期望轨迹需满足当前航向角追踪期望轨迹切线角,即θ→ϕ,因此角度总变化量等于二者之差:

则式(9)可变为
对式(6)–(7)进行拉普拉斯变换并代入式(5)可得

其中∆V(s)和∆U(s)分别为∆v和∆u的拉普拉斯变换.
对式(12)进行拉普拉斯逆变换可得以下微分方程:

定义x=[x1x2x3]T=[d θ∆v]T为状态变量矩阵,以及控制输入u=[∆u].取y=θ=x2为系统输出.由式(11)(13)可得以下方程:

下式表示一般形式移动机器人运动学模型:
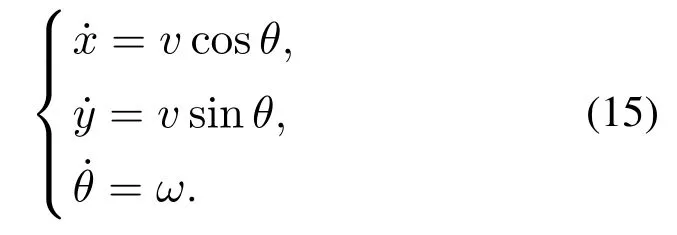
瞬态运动学模型(14)将一般运动学系统转化为单输入串级控制系统,从而避免了模型(15)中v,ω多输入耦合造成相互干扰的问题.
在现实条件下,由于存在齿轮间隙、温度改变造成的电机参数变化、机器人与地面间摩擦、机械系统磨损等因素,因此需考虑系统不确定性及外部干扰的影响,则第i个机器人的系统状态方程为

其中D为系统集总参数不确定性,包括模型不确定性和外部干扰等.D满足∥D∥D0,D0为正实数.
2.2 交叉耦合误差
定义第i个机器人角度误差:

其中θi,ϕi分别表示第i个机器人的当前航向角和期望轨迹切线角.
由于系统的同步要求各机器人保持与其他机器人之间的运动同步,即各机器人在运动时保持一定的几何关系.用以下同步运动方程表示为

其中ci >0为第i个机器人的同步系数.
由于在同步运动过程当中,机器人最终需实现跟踪各自期望轨迹的任务,因此期望航向角ϕi同样需满足同步运动方程(18),即

由式(18)–(19)可得多移动机器人系统所要实现的同步约束:

根据无向图理论,同步误差可定义为

其中aij为集合A中的元素.
设计双向环形通讯拓扑,如图2所示.
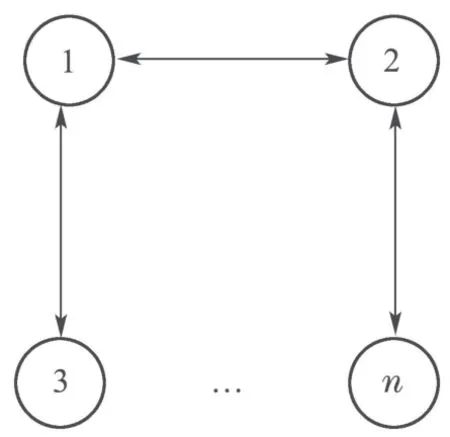
图2 通讯拓扑Fig.2 Communication topology
并结合式(20),定义位置同步误差:
其中εi为第i个移动机器人的航向角同步误差.
将式(22)以矩阵形式表示:

其中系数矩阵
为同步转换矩阵,T
当c1=c2=···=cn=1时由图论基本概念可知,同步转换矩阵T即为图2所示通讯拓扑的拉普拉斯矩阵.当ε=0时,系统将会满足同步约束(20).
根据文献[24]定义交叉耦合误差如下:

其中:Ei为第i个移动机器人的交叉耦合误差;φ>0表示耦合系数.考虑整个机器人系统并结合式(24),得到整个系统交叉耦合误差为
由于I+ϕT为对称正定矩阵,因此当交叉耦合误差E收敛到0时,航向角误差e与同步误差ε也将收敛到0.
3 鲁棒自适应终端滑模同步控制器设计
由于移动机器人追踪期望轨迹需满足以下两个条件:
1)机器人航向角追踪期望轨迹切线角;
2)机器人中心偏移趋近于0.
因此系统同步控制目标可总结为通过控制器的设计实现交叉耦合误差E和中心偏移d收敛到0.
为了简化运算,首先定义如下符号:

根据构造的交叉耦合误差,设计如下终端滑模控制器:

其中:λ1>0;0<γ <1;E由式(26)给出.
对滑模(28)求其一阶导数可得
其中:系统状态x2=[x21x22···x2n]T;期望角度ϕ=[ϕ1ϕ2···ϕn]T.
将式(16)代入式(29)可得

其中:系统状态x3=[x31x32···x3n]T;系统控制输入u=[u1u2···un]T.
采用如下终端滑模型趋近律,如式(31)所示:

其中:K1>0;K2>0;0<β <1.
设计如下同步终端滑模控制器:
其中:u1=[u11u12···u1n]T为趋近控制律,当D=0时,u1可保证系统能够有限时间稳定;u2=[u21u22···u2i···u2n]T为鲁棒控制项,用以克服D的影响.
定理1考虑n台移动机器人,如果位置控制器设计如式(32),那么其位置交叉耦合误差E可在有限时间收敛到滑模面s=0.
证定义Lyapunov函数如下:

对其求导,先后代入式(30)和式(32)整理可得

由文献[29]可知,解微分不等式(34)可得收敛时间保守估计为
证明系统状态可以在有限时间收敛到滑模面s=0.
证毕.
为避免实际应用中由于调节控制器切换增益K2而造成的困难,提高控制器性能,引入自适应律
则由式(32),式(36)最终得到终端滑模控制器为
4 系统稳定性证明
引理1(Barbalat引理[30])若x:[0,∞)→R一致连续,存在且有界,则
定理2考虑不确定非线性移动机器人系统(16),如果在滑模切换函数(28)的基础上设计终端滑模同步控制器(37)并采用自适应律(36),则航向角交叉耦合误差E和中心偏移x1=d均会渐进收敛到0.
证对于系统(16),定义一个新的Lyapunov函数:

对其进行求导可得
将式(16)(30)(36)–(37)代入式(39)可以得到
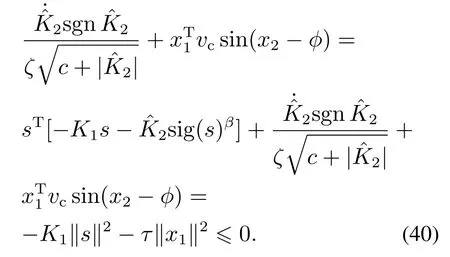
因此V2是半负定函数,随时间t满足以下条件:

由式(40)可得

而由式(42)可得

同理可得

由于x1和s均一致连续,根据Barbalat 引理[30]可得:当t→∞时,有x1→0,s→0,即中心偏移x1=d可渐进收敛到0.又由式(14)中可知,若x2有限时间收敛,则x1=d也可有限时间收敛. 证毕.
因此由上述证明可得航向角交叉耦合误差E和中心偏移x1=d均会有限时间收敛到0.
5 仿真结果
为证明算法的有效性,针对由4台机器人组成的系统进行仿真验证.控制器参数设置如下:
λ1=20,γ=0.3,K1=2,β=0.9,
φ=0.1,ζ=5,η=2.82,c=0.1,τ=1.

则4辆移动机器人期望航向角为

移动机器人物性参数如表1所示[17].
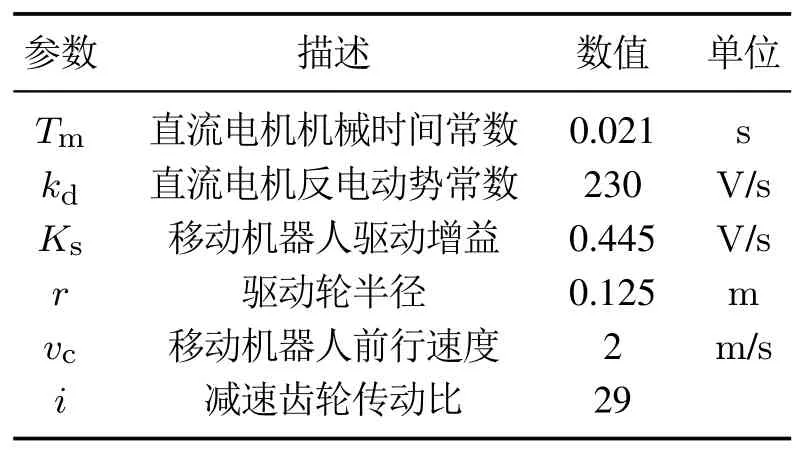
表1 机器人物性参数Table 1 Robot physical property parameters
机器人初值坐标为(0,0),(0,1),(0,2),(0,3),初始航向角为θ1=θ2=θ3=θ4=仿真时间T=15 s.仿真结果如下:
图3表示4辆移动机器人追踪期望轨迹的过程.从图3可以看出4辆机器人均能在很短时间内实现对各自期望轨迹的跟踪.

图3 期望轨迹跟踪Fig.3 Tracking of desired trajectories
图4–5分别表示4辆机器人航向角误差e及航向角交叉耦合误差E收敛情况.可以看出航向角误差与交叉耦合误差均能有限时间收敛到0,实现对期望航向角ϕ(期望轨迹切线角)的跟踪.
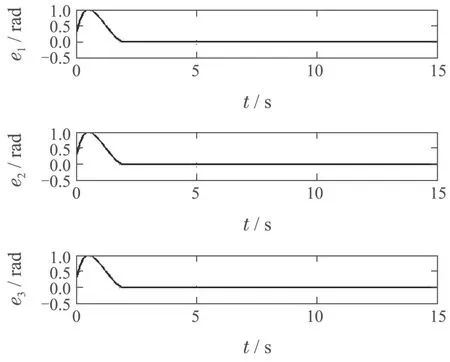

图4 航向角误差Fig.4 Heading angle errors
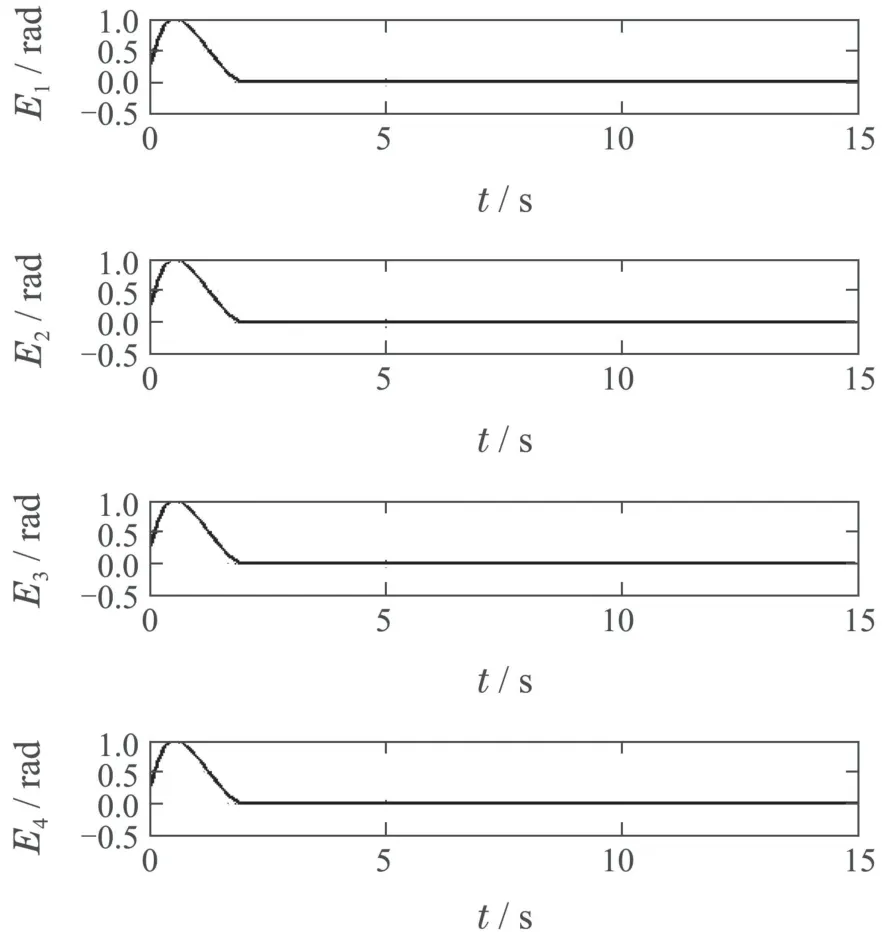
图5 交叉耦合误差Fig.5 Cross coupling errors
从图6可以看出机器人中心偏移d(位置误差)能迅速收敛到0,实现对期望轨迹的位置跟踪.且由图4–6可以看出,4辆车角度误差、交叉耦合误差及中心偏移收敛趋势完全一致,证明移动机器人在追踪各自期望轨迹的同时能够实现与其他机器人的运动同步,证明所提出的同步算法的有效性.
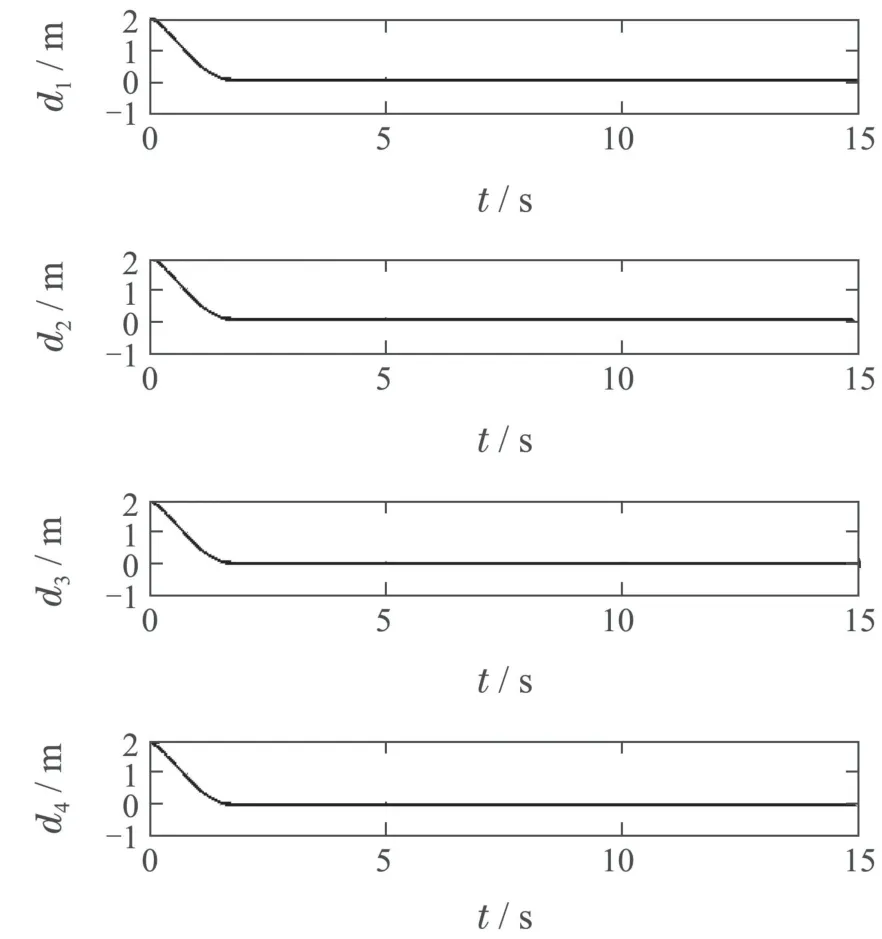
图6 中心偏移Fig.6 Center offset
图7表示在系统进入稳态之后t=5时对第一辆移动机器人施加D=10的外加干扰之后系统的同步误差.可以看出其他3辆机器人有相同的变化趋势,进一步证明了同步控制的有效性.图8表示机器人控制输入,可以看出控制输入均有界且能够实现稳定.仿真结果证明了所设计控制算法的有效性.

图7 同步误差Fig.7 Synchronization errors
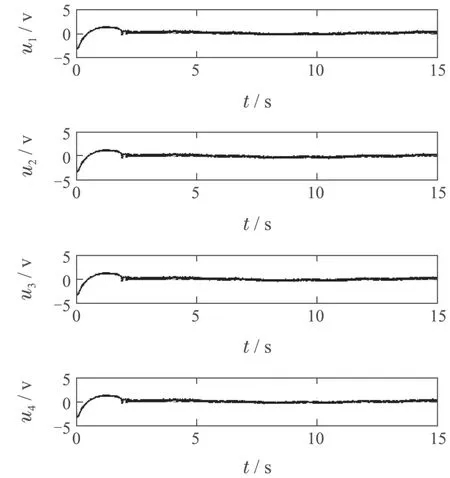
图8 控制输入Fig.8 Control inputs
6 结论
本文以多移动机器人系统为研究对象,提出了一种基于瞬态模型和图论原理的鲁棒自适应同步终端滑模控制器设计方法,避免了一般移动机器人一般运动学模型多输入耦合的问题.通过结合鲁棒控制克服了系统集总不确定性的影响,同时采用自适应参数估计完成切换增益的实时调节.所设计交叉耦合同步控制器不仅可以实现移动机器人追踪自身期望轨迹,同时又解决了与其他机器人的运动同步问题.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
汽车实用技术(2022年5期)2022-04-02
汽车实用技术(2022年5期)2022-04-02
现代仪器与医疗(2021年1期)2021-06-09
北京航空航天大学学报(2020年10期)2020-11-14
中国新技术新产品(2020年4期)2020-05-05
电子技术与软件工程(2019年20期)2019-11-30
计算机测量与控制(2018年9期)2018-09-19
数码世界(2017年7期)2017-12-29
科技创新导报(2017年3期)2017-04-13
