面向复杂产品元件装配的流程建模与优化
2020-04-22 10:37秦建军路可欣
科学技术与工程 2020年7期
秦建军, 林 键, 路可欣
(北京建筑大学机电与车辆工程学院,城市轨道交通车辆服役性能保障北京市重点实验室,北京 100044)
产品元件装配流程属于相对复杂的系统工程,其元件间结构错综复杂[1],对元件装配进行合理规划,可减少产品缺陷、提高质量[2],同时加速创新,促进产品的持续改进与完善[3],实际上更是对元件进行有效的组织与管理[4]。
针对这一问题,中外学者进行了深入研究[5-6],在复杂产品元件模块化聚类方面,Algeddawy等[7]提出基于设计结构矩阵(design structure matrix, DSM)的层级聚类,以划分元件结构。Pandremenos等[8]运用布尔型DSM对元件间关系进行描述,并采用自组织神经网络算法进行聚类,使聚类精度得以提升。在元件装配流程优化方面,Yang等[9]提出从元件连接角度构建产品模型,以选择最佳装配方式。在此基础上,Li等[10]基于遗传算法,对装配路径进行求解,在可选路径中找到最大可能及最短时间的路径。Ma等[11]从元件的连接角度出发,构建装配网络图,并应用改进的蚁群算法,寻找最小变更影响的装配方式,提高了研发效率。为进一步解决元件装配中的主观性问题,Lian等[12]构建了复杂产品设计网络,利用改进布谷鸟搜索算法对装配流程进行优化。

图1 复杂元件装配流程图Fig.1 Complex component assembly flow chart
由此可以看出,在产品元件装配问题上,大多数学者从元件模块化聚类以及装配流程优化两方面进行分析,以提升产品性能。为此,提出复杂产品元件装配流程规划方法,利用网络分析模型与模糊DSM将元件的信息依赖关系定量化表示,基于效用理论进行模块划分,确定各元件模块的入出集,最终实现元件的合理装配,其具体流程如图1所示,以液压四足机器人腿部元件装配为例[13-16],对该方法加以验证。
1 复杂元件模块化类型
1.1 设计过程模块
设计过程模块(design process module, DPM)表示产品设计的元件单元集合,G(φ)为每个DPM中元件单元个数,当G(φ)≥1时则至少含有一个元件单元。将设计过程中耦合紧密度高的结构元件结合在一起,通过矩阵变换以减少系统的信息输入,降低产品设计开发的时间及成本。
1.2 原子设计过程模块
原子设计过程模块(atomic design process module, ADPM)指不能再次分解为子模块的设计过程模块,如图2所示,由元件区、DPM序号区以及符号标志区组成,其中符号标志区用A表示,即为ADPM。

图2 ADPM过程模块Fig.2 ADPM process module
1.3 嵌套设计过程模块
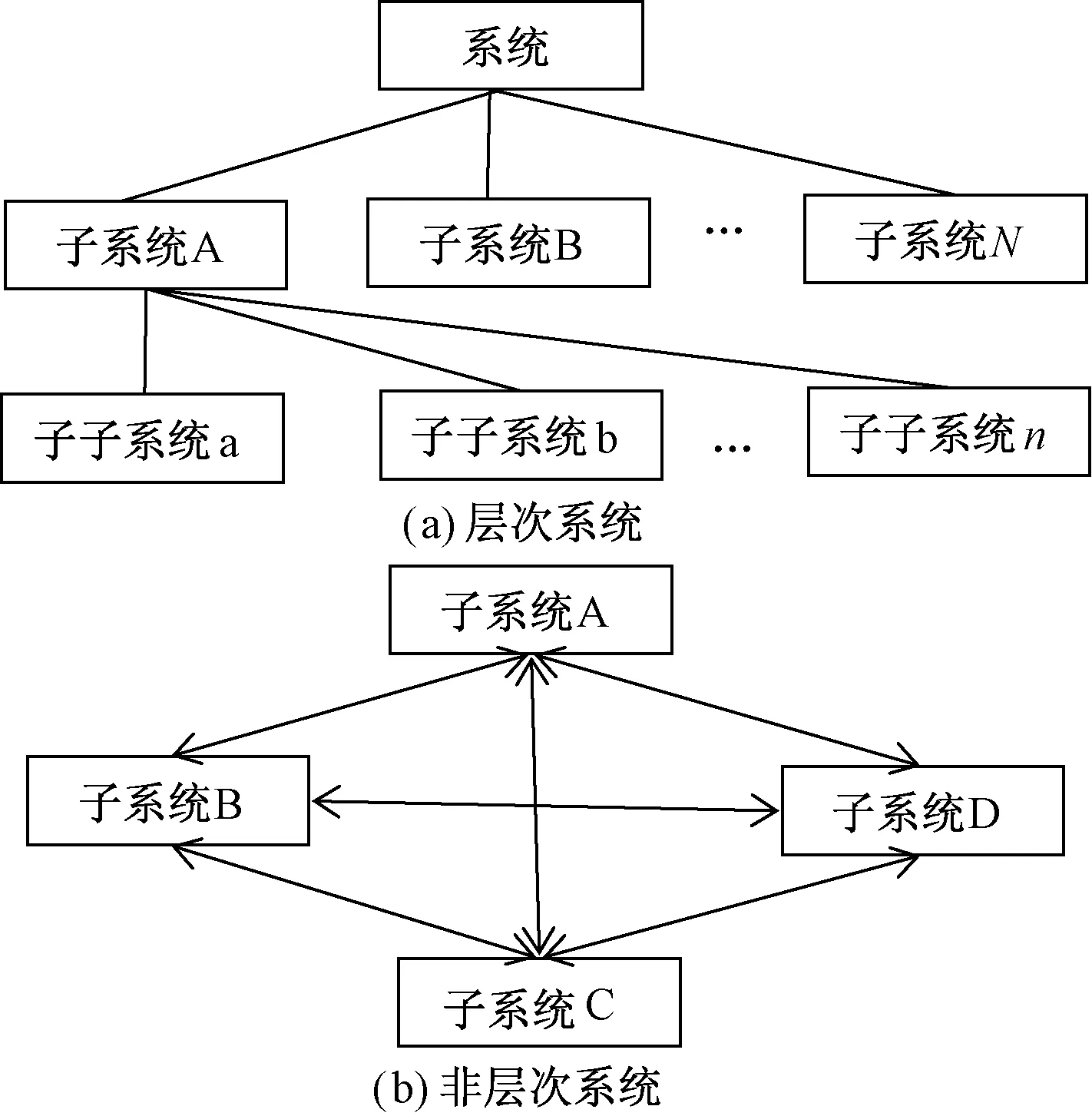
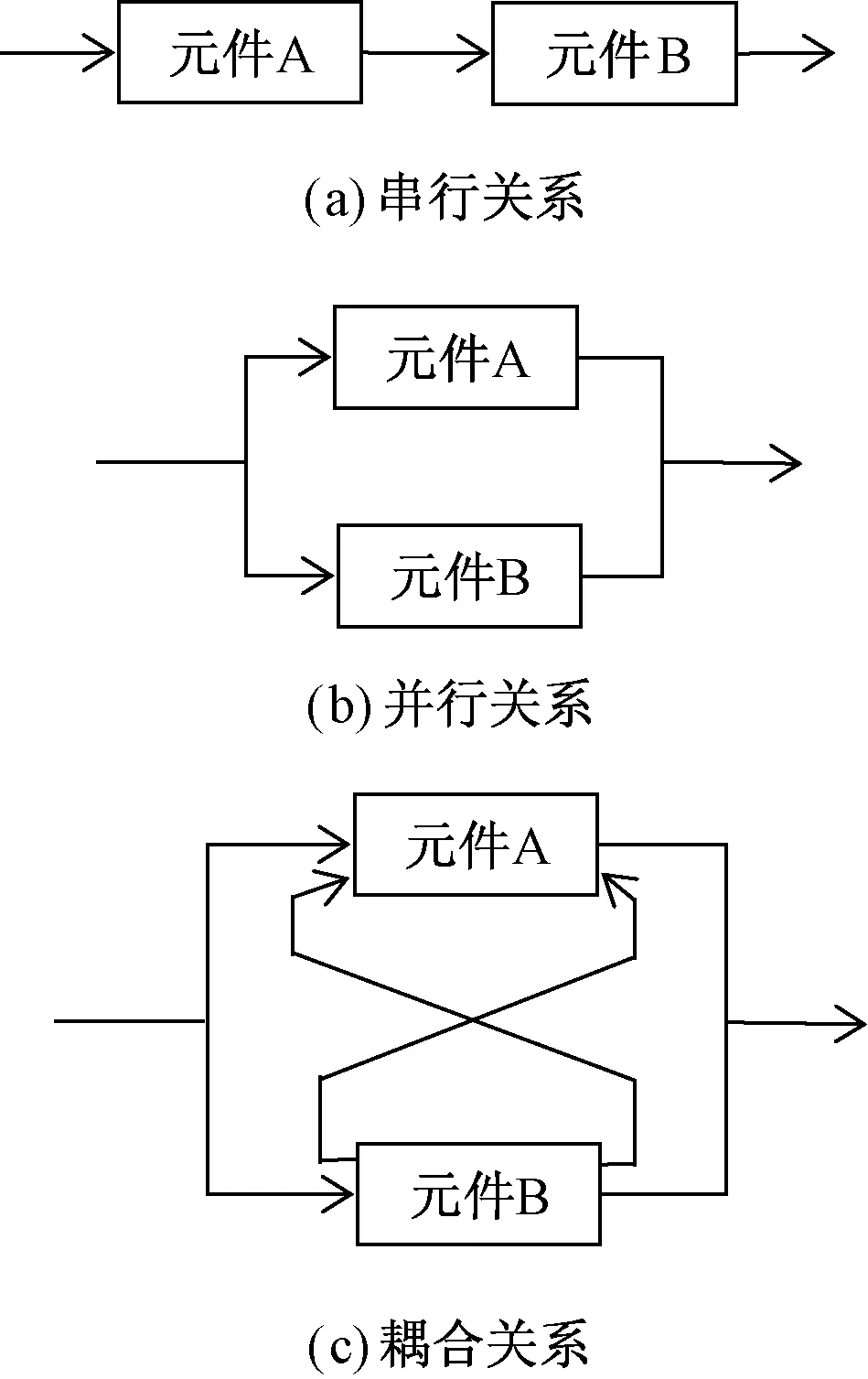
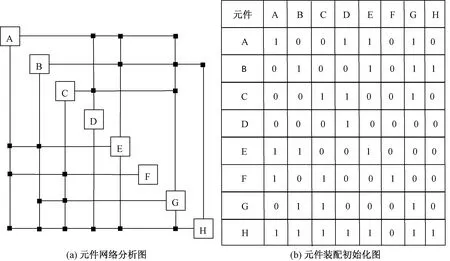
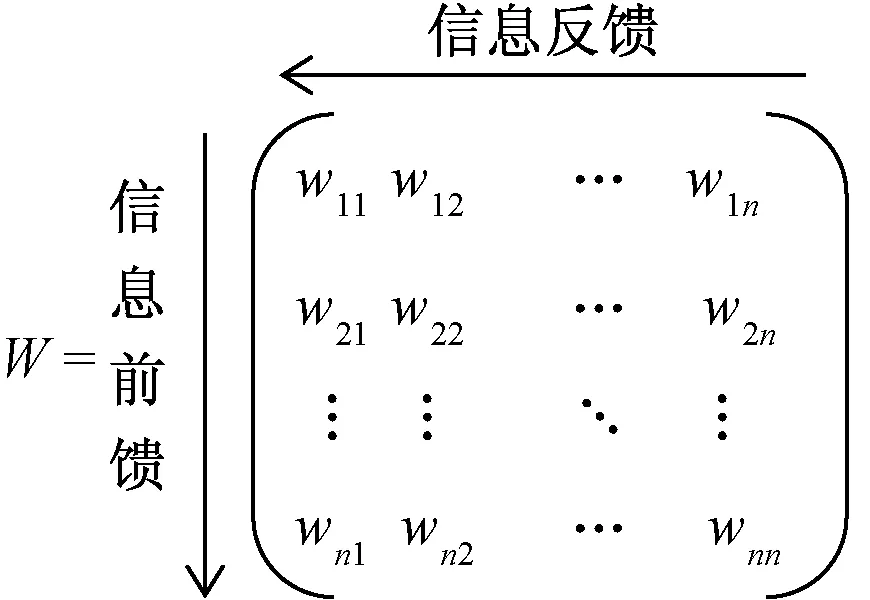
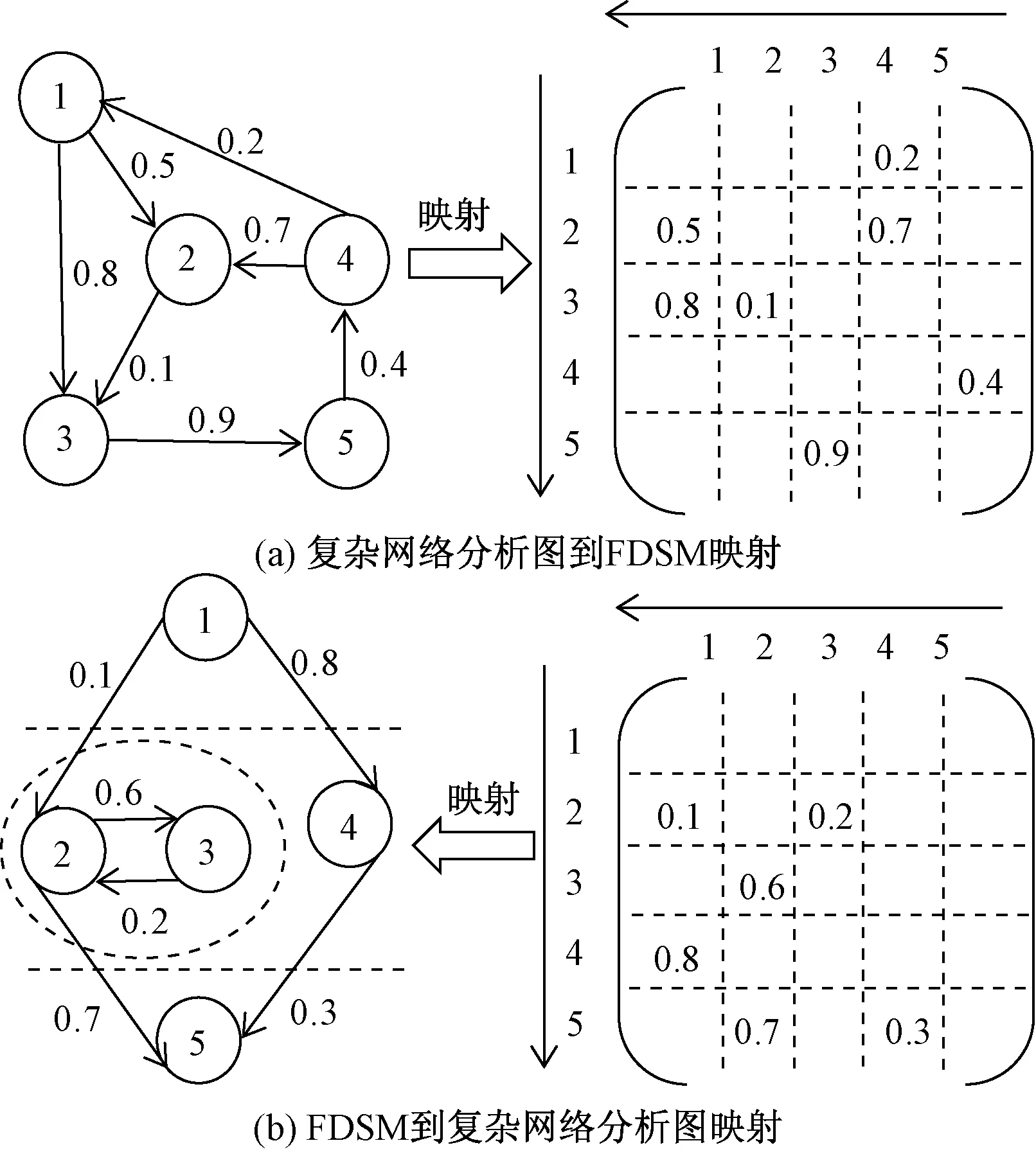
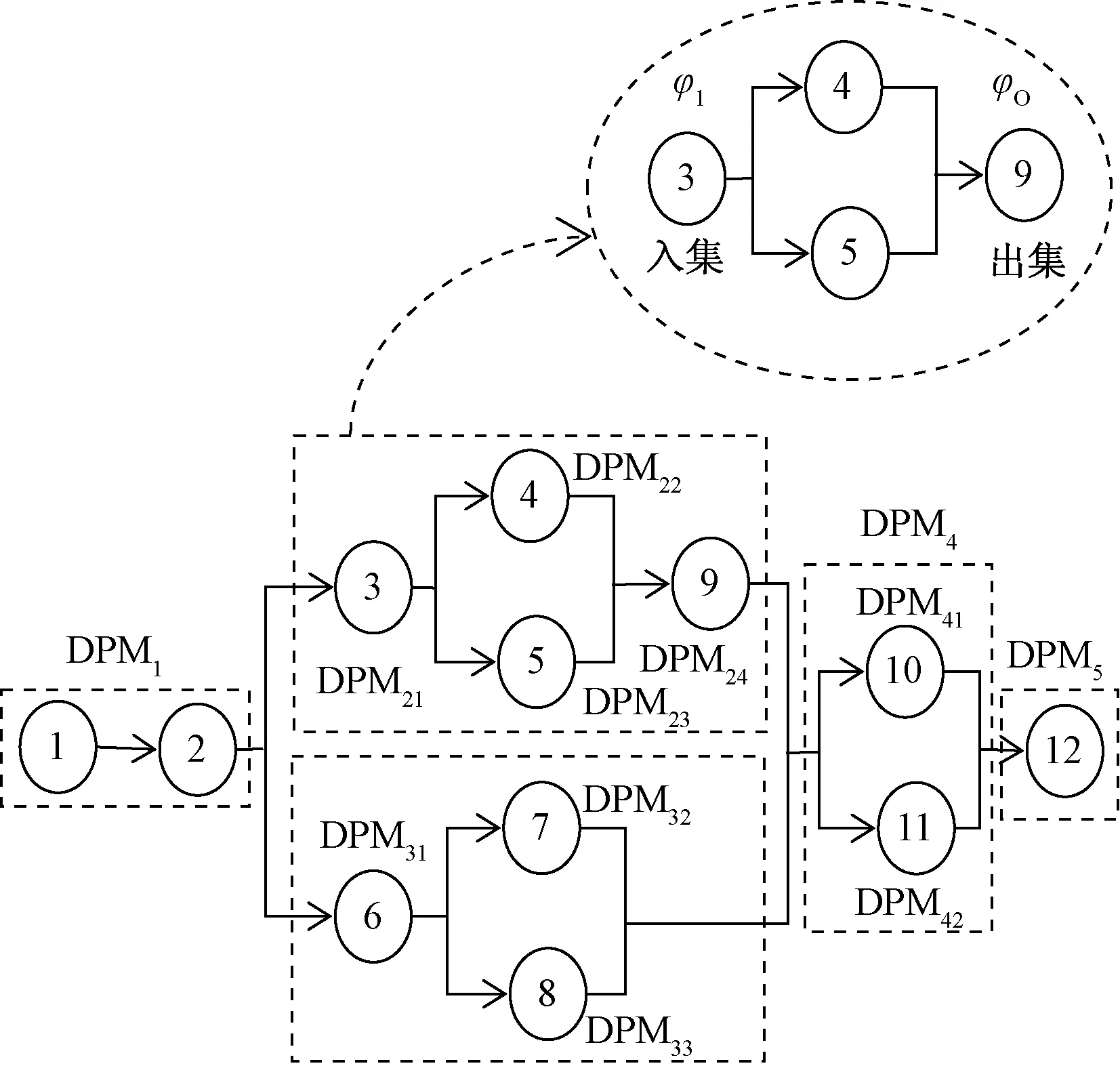
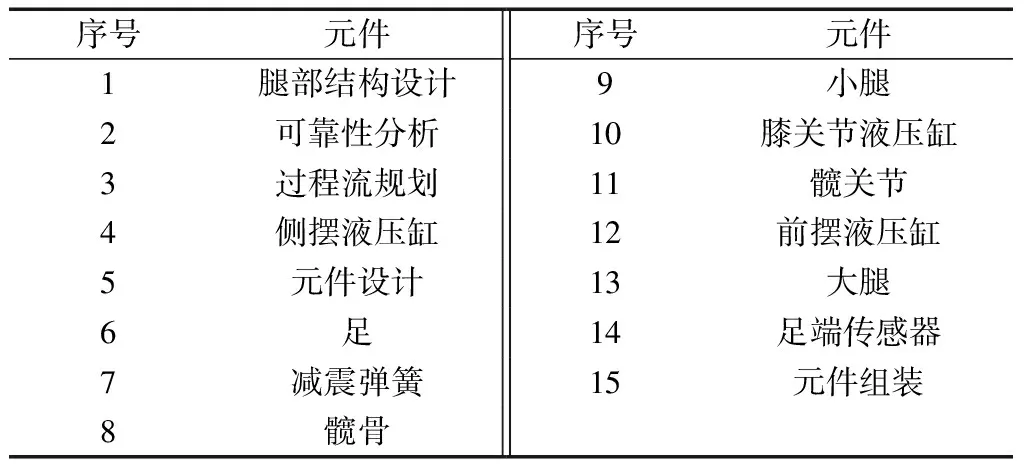
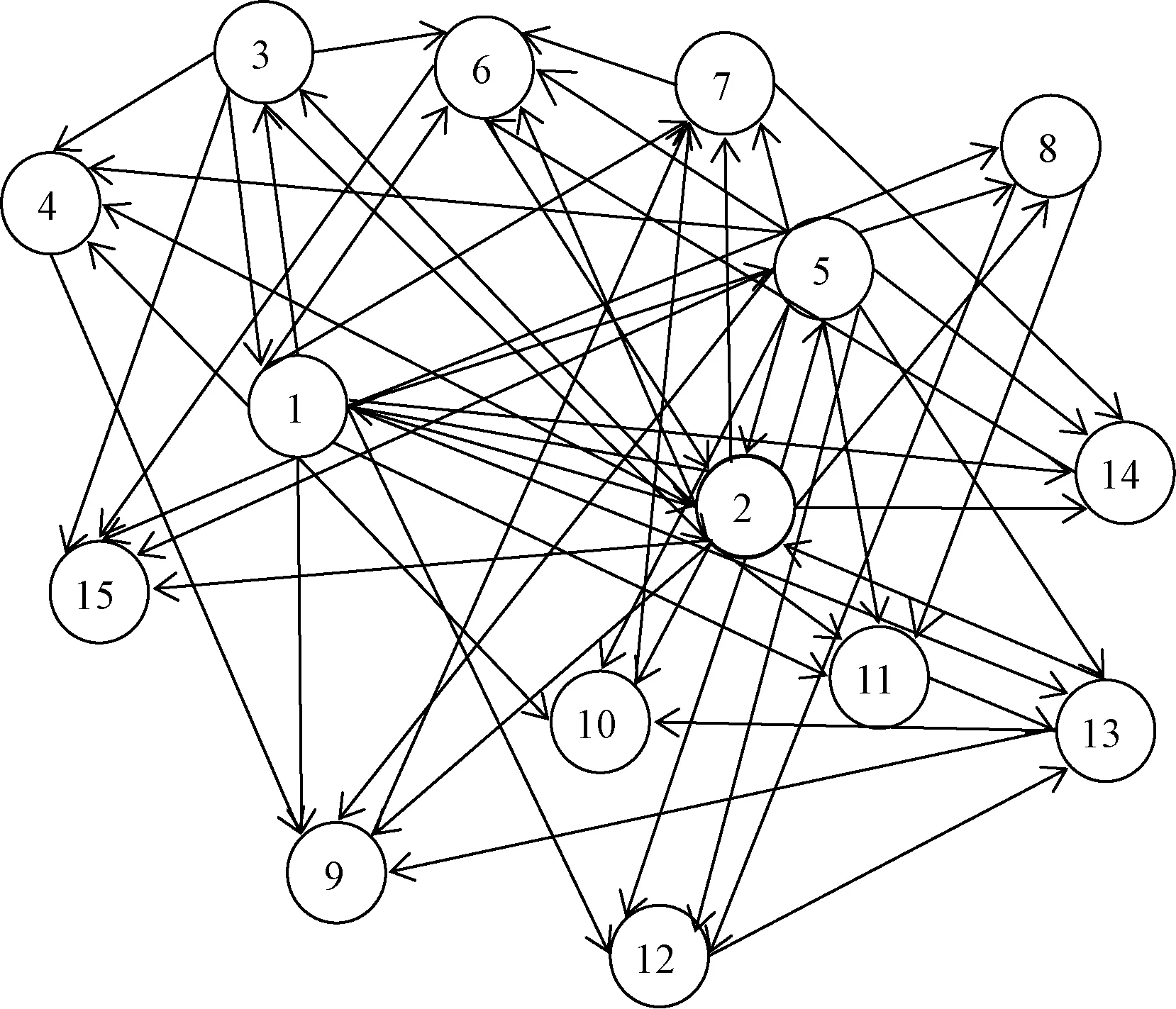
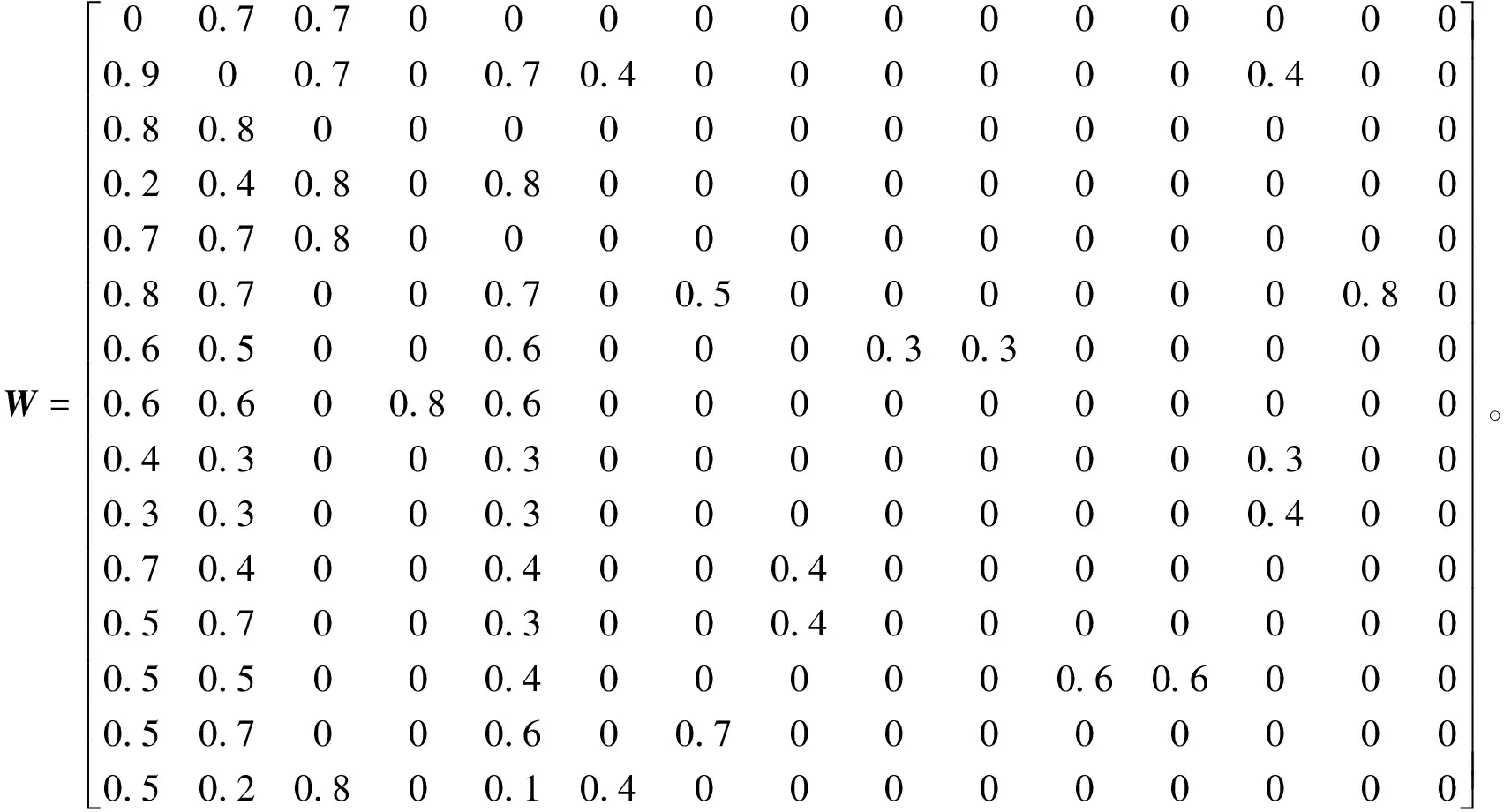
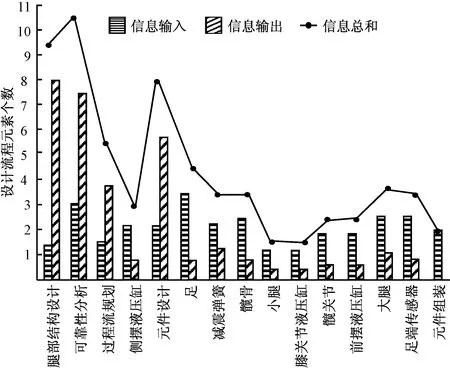
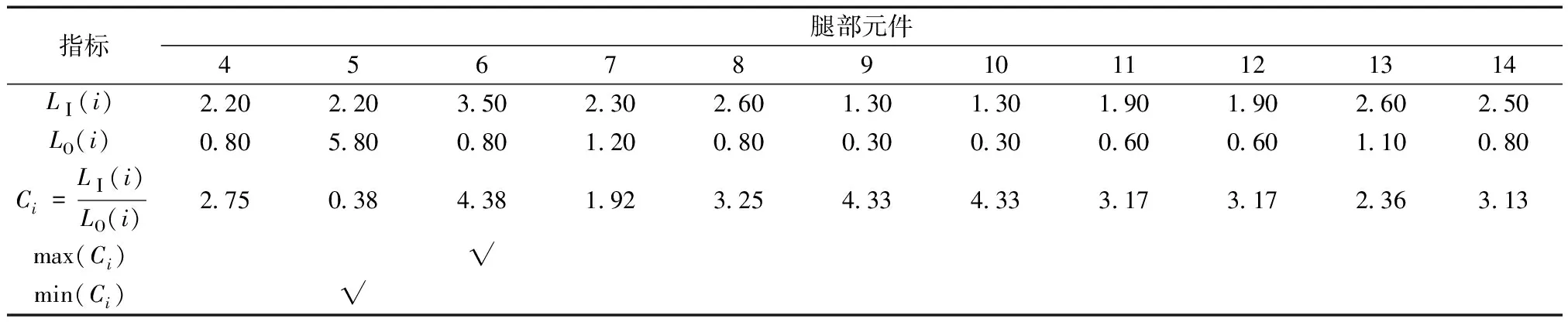
嵌套设计过程模块(nesting design process module, NDPM)特指该设计过程模块能被分解为子模块,如图3所示,由元件区、DPM序号区以及符号标志区组成。其中,NDPM区包含所有ADPM;DPM序号用表示,j=1,2,…,k(k 图3 NDPM过程模块Fig.3 NDPM process module 在复杂元件装配过程中,存在大量元件交互与耦合的现象,根据系统间的关系,可划分为层次系统与非层次系统,层次系统的特点为子系统间元件信息顺序流向、无耦合关系,且呈树状结构;非层次系统是不存在等级关系、子系统间元件信息耦合,且呈网状结构。如图4所示,若忽略非层次系统中的耦合关系,可将非层次系统转化为层次系统,层次系统为非层次系统的特殊形式。在实际的产品元件装配流程中,多为非层次系统,故以非层次系统为研究对象。 图4 层次系统与非层次系统Fig.4 Hierarchical system and non-hierarchical system 图5 两元件间信息传递关系Fig.5 Information transfer relationship between two components 在非层次系统中,两元件间的信息关系一般分为三种,如图5所示,其中,图5(a)为串行关系,表示元件A和元件B具有先后依赖关系,元件B需要元件A提供输入信息;图5(b)为并行关系,表示元件A与元件B无必然关系,两元件间互相独立;图5(c)为耦合关系,表示元件A与元件B相互影响,各元件间存在大量交互反馈,需多次迭代才能完成,耦合关系较为普遍,其中串行与并行可视为耦合关系的特例。在复杂元件的产品设计中,串行与并行关系的元件信息传递明确且易于处理,而耦合关系中元件信息的迭代与反复增加了复杂性,应对复杂元件的产品设计流程进行优化,以减少迭代次数,提高设计效率。 采用设计结构矩阵表示元件间的耦合关系,如图6所示,将n个元件顺序排列,构成n×n的方阵,行与列对应相同顺序的元素,其中矩阵中元素的定义式为 (1) 式(1)中:当i≠j时,表示元件自身的信息耦合。 如图6中的DSM表示:①矩阵的维数为元件个数,对角线的元素为元件本身;②每一行表示元件的执行需要其他元件的输入信息,每一列表示元件对其他元件的输出信息;③矩阵对角线以下的信息表示前馈信息,对角线以上为反馈信息;④通过对DSM进行变换处理,减少反馈信息造成的设计重复,尽可能将反馈信息与相应的元件接近,当DSM呈上三角时为理想的元件设计优化,表示各元件间不存在反馈耦合关系。 图6 设计结构矩阵Fig.6 Design structure matrix 元件网络图可以表示为M=(O,P),O=(o1,o2,…,on)为节点集合,P=(p1,p2,…,pm)为边集合,运用复杂元件网络建模,各节点为产品结构元件,边为元件素间物理连接关系,边的权重为传播强度,传播强度越大,其对应的权重值也越大,其中复杂元件网络图可由邻接矩阵W表示,W由元素Wij表示,其中Wij的定义式为 (2) 在邻接矩阵W中,元素wij≥0,方向是元件受物理连接约束的指向,边的粗细为元件间传播强度大小,采用0~0.9数值标度法量化,数值越大表示结构元件间关联越强。 模糊设计结构矩阵(fuzzy design structure matrix, FDSM)是对布尔型设计结构矩阵的改进,其具体步骤为:①对各元素进行关联识别;②度量元素关联程度;③构建FDSM实现模块化;④分析关联特性的无序FDSM确定耦合顺序。在整个产品元件装配过程中,结构元件δ1,δ2,…,δn构成论域Y,由复杂网络结构可得到模糊设计结构矩阵W,其定义式为 (3) 模糊设计结构矩阵建立了设计过程结构化模型,以减少设计过程中的迭代,降低迭代风险,如图7所示,复杂网络结构到FDSM的映射,有效地表达了结构元件的信息关联程度。 图7 复杂网络分析图与FDSM映射Fig.7 Complex network analysis graph and FDSM mapping 其中,两设计元件x与y间的耦合程度定义式为 (4) 式(4)中:n为结构元件数量。 (5) 式(5)中:λ为截集阈值。 当λ由0~1逐渐增大时,矩阵中0元素也随之增加,聚类程度逐渐细化,故λ决定聚类结果,如图8所示,当聚类程度最细时,分得的结构元件最多,成本提高,周期增长;当聚类最粗时,结构元件间复杂程度也随之提高,因此需依据实际情况选择λ,以确保聚类的合理性。 图8 模块划分截集阈值Fig.8 Module partitioning threshold 当在产品元件装配过程中存在元件间信息依赖程度不等时,即wij≠wji,一般采用效用理论确定二者间依赖关系,其定义式为 (6) 再通过夹角余弦法则确定元素间相似系数,其定义式为 (7) qij构成的矩阵Q即为论域上的模糊相似矩阵 (8) 式(8)中:主对角线为结构元件本身,非对角线为结构元件间的信息交互强弱。 DPM可被逐层迭代分解为若干子模块,以图9为例,该产品元件的最高层级DPM,分为DPM1、DPM2、DPM3、DPM4、DPM5,其中DPM1与DPM5不可继续分解,故为ADPM,而DPM3、DPM4、DPM5可继续分解,故为NDPM,每个子模块包含子子模块,即DPM2(DPM21、DPM22、DPM23、DPM24),DPM3(DPM31、DPM32、DPM33),DPM4(DPM41、DPM42)。 入集出集统记为φⅠ0,结构元件是DPM间信息交流渠道,其中入集φⅠ是DPM最上游的活动,出集φO是DPM最下游的活动,如图9所示,DPM2的规模最大,以DPM2为例,其入集为φⅠ(DPM2)=3,出集为φO(DPM2)=9。 图9 元件装配过程模块Fig.9 Component assembly process module 假设DPM有n个结构元件,每个结构元件δi∈DPM,(I=1,2,…,n)的信息输入与输出关联程度分别用LⅠ(i)与LO(i)表示,确定DPM中结构元件的信息依赖程度,其定义式为 (9) 式(9)中:LⅠ(i)为复杂网络分析图中结构元件δi向其他元件输入的权重之和;LO(i)为复杂网络分析图中其他结构元件向结构元件δi的输入权重之和。 若Ck=min{Ci},∀i=1,2,…,n,则称δk为入集,即φⅠ(DSM)=δk,若Cl=max{Ci},∀i=1,2,…,n,则称δl为入集,即φO(DSM)=δl。 液压四足机器人凭借其离散式的地面支撑能力,可行进于泥泞砂石、崎岖山地以及超距沟渠等不同路面,且在星际探测、矿产挖掘与军事侦察等多领域具备相对优势,因此有较强的应用价值与发展前景。在野外的非结构化地形中,对四足机器人的环境适应能力要求极高,需应对来自外界的冲击与干扰,腿部元件设计要满足自行蹲起和跌倒后站立等多方面能力要求,多自由度单腿元件设计作为重要的四足机器人基础运动组成部分,对实现复杂与多变的运动起到了关键作用。 因机器人为新兴产业,与传统产品结构相比,液压四足机器人腿部结构较为新颖,故本文以腿部元件装配流程为研究对象。其装配流程规划包括腿部结构设计、可靠性分析、过程流规划等15个设计活动,根据相关专家以及设计人员的分析,该结构装配程度为中等级别,具体腿部元件如表1所示。 表1 液压四足机器人腿部结构设计元件 根据相关专家与设计人员的经验,利用式(2)得出各腿部元件之间的相互依赖强度,用复杂网络分析图表示液压四足机器人腿部元件间的关系,其中边上的数值省略,如图10所示。 图10 液压四足机器人腿部结构元件复杂网络分析图Fig.10 Complex network analysis diagram of the structural components of the hydraulic quadruped robot 利用式(3)将液压四足机器人复杂网络分析图映射为模糊设计结构矩阵W: 基于效用理论,利用式(5)构建FDSM结构元件之间的依赖关系,得到液压四足机器人腿部元件的模糊关系矩阵,采用夹角余弦法则,求得模糊相似矩阵,其中模糊等价矩阵为Q12,由结构元件描述可知,该腿部元件为中等级别,取ω=0.5,得到Q0.5: 由表2可知DPM3的入集为元件5,出集为元件6,由于篇幅所限,采用相同的方法求得所有DPM的入出集,结果如图11所示。即: φⅠ(DPM1)=1,φO(DPM1)=2;φⅠ(DPM2)=φO(DPM2)=3;φⅠ(DPM3)=5,φO(DPM3)=6;φⅠ(DPM4)=φO(DPM4)=15。 其中DPM3是NDPM,可继续划分为九个ADPM,即:DPM3=(DPM31, DPM32, DPM33, DPM34, DPM35, DPM36, DPM37, DPM38, DPM39),子模块的入出集采用相同方法迭代,求得最终的液压四足机器人腿部元件设计的DPM及其入出集,构建优化流程如图12所示。 图11 液压四足机器人腿部结构元件信息交互统计Fig.11 Information exchange statistics of structural components of hydraulic four-legged robot 表2 DPM3的φⅠ和φO求解过程 图12 液压四足机器人腿部元件装配流程图Fig.12 Hydraulic four-legged robot leg component assembly flow chart 由图11可以看出,根据本文所提方法对液压四足机器人腿部元件装配流程进行DPM划分,结果符合设计流程,同时DPM可清晰 达元件间的信息流向,体现出元件的串行、并行以及耦合关系,在液压四足机器人腿部元件装配的过程中,基于DPM进行装配过程的规划与管理,从而确定对元件的优化执行顺序,降低过程中的反复与迭代,缩短了新产品新产品设计周期。 从元件信息流角度将元件装配过程分解为DPM,便于设计人员对复杂系统进行分析与规划管理,得到以下结论。 (1)将复杂网络分析图与模糊设计结构矩阵进行耦合,实现对元件间信息流依赖关系的定量化表达。 (2)基于效用理论对DPM进行划分,为元件装配流程的优化提供支持,避免了传统模块间关联松散的缺点,降低了元件间的反复迭代,对执行顺序进行合理规划,具有良好的应用价值。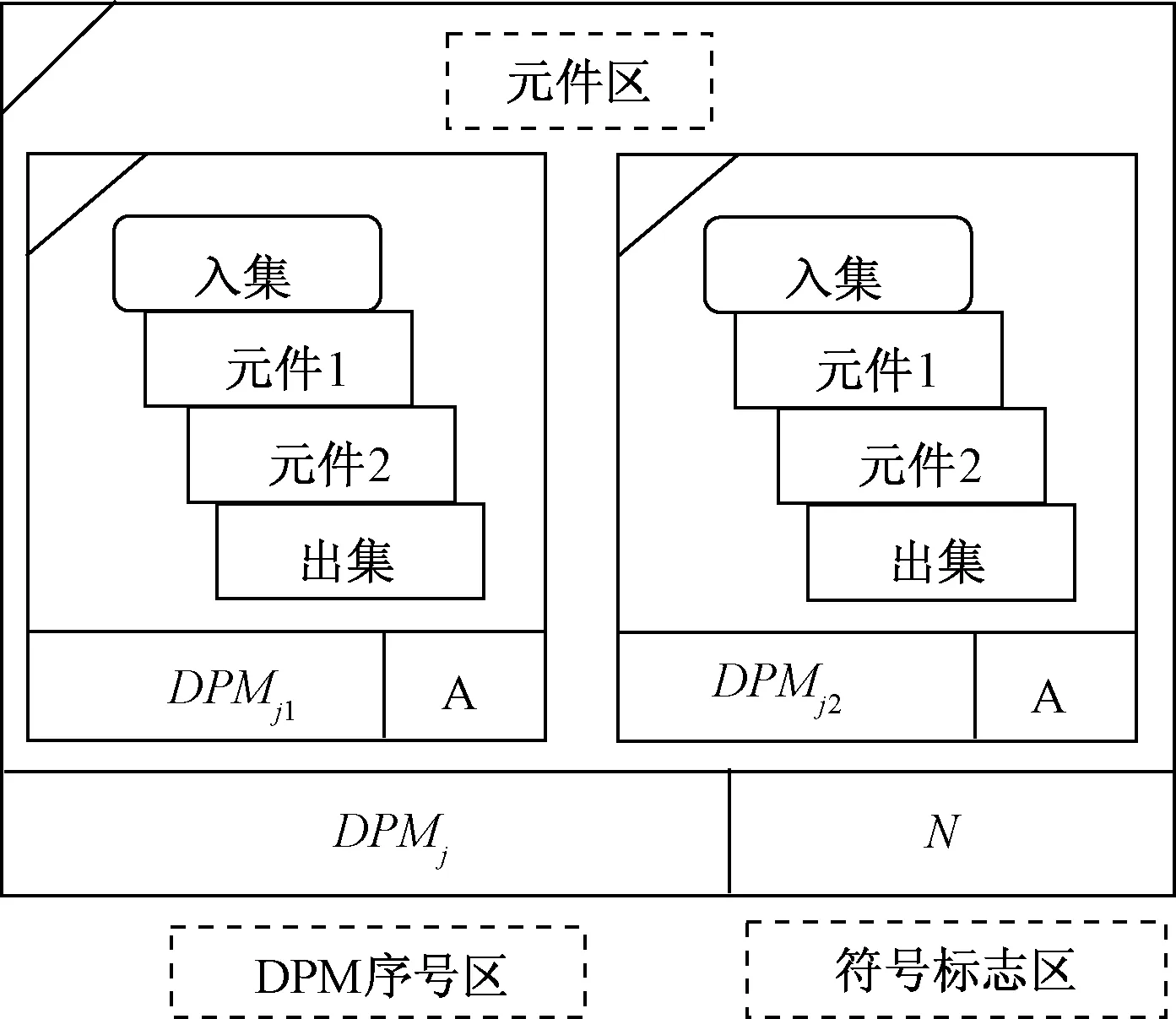
2 复杂元件网络建模及模块聚类
2.1 元件设计建模
2.2 元件网络建模
2.3 元件模块聚类

3 复杂元件装配流程规划
4 案例分析



5 结论
猜你喜欢
辽宁工业大学学报(自然科学版)(2022年4期)2022-09-19
玩具世界(2022年2期)2022-06-15
中国特种设备安全(2022年1期)2022-04-26
房地产导刊(2021年12期)2021-12-31
北京航空航天大学学报(2021年9期)2021-11-02
电子制作(2019年16期)2019-09-27
中学生数理化·中考版(2016年7期)2016-12-07
伴侣(2016年8期)2016-08-11
恋爱婚姻家庭(2015年27期)2015-12-19
恋爱婚姻家庭·养生版(2015年9期)2015-05-14