
GPS测量系统和全站仪对在建超高层建筑动力特性的识别
2020-04-22 06:46梁强武吴玖荣屈康能黄善琪
科学技术与工程 2020年6期
梁强武,吴玖荣*,屈康能,黄善琪
(1.广州大学广州大学-淡江大学工程结构灾害与控制联合研究中心,广州 510006;2.华润置地(南宁)有限公司,南宁 530021;3.广西大学土木建筑工程学院,南宁 530004)
随着经济的发展和科学技术的进步,高层建筑向着更高、更柔的方向发展,高层建筑结构的基阶自振频率愈加接近强风的卓越频率,对风荷载极其敏感。在高层建筑施工过程中,随着高度的不断增大,建筑结构容易受到风力、温差和塔吊动荷载等不利影响,结构会产生一定的水平变形。过大的水平变形,会使得设备无法安装。尤其是电梯当水平变形超过电梯的容许值时,电梯设备将无法安装或是正常运行[1]。因此,探讨超高层建筑在施工过程中的水平位移和结构动力特性的变化,对于结构施工安全评估具有重要的意义[2-3]。
GPS定位技术是基于载波相位观测值的实时动态相对定位技术,能够实时测出测站点的三维定位坐标[4]。GPS能够在台风、大雾、暴风雨等恶劣环境中全天候使用,能够直接测定监测点的三维坐标值,自动化程度高,多个不同监测点能够同步测量等诸多优点[5-6];但是GPS对测站点的周边通视要求比较高,基准站和流动站之间不得有高层建筑、玻璃幕墙、大面积水域等信号反射物,在处理GPS测量数据时,还会出现周跳的探测、整周模糊度求解等现象[7-8]。以广西南宁华润中心东写字楼为研究背景,使用GPS测量系统结合全站仪对其在施工期间的楼层水平位移进行实时监测,对其在建期间部分监测点进行了长时间的动态位移监测,以识别此在建高层建筑在施工过程中结构的动力特性。
1 监测仪器
1.1 GPS测量系统
为了实测施工期间塔楼顶部的位移,通过两台高采样频率的Leica双频GS15型GPS接收机,安装在施工期间塔楼主体结构顶部,作为流动站(图1)。在距离300 m内的万象城楼顶(5层楼高,其水平和竖向位移可以近似忽略不计)的开阔地带安装一台Leica双频GS15型GPS接收机,作为基准站(图2)。

图1 流动站

图2 基准站
在用GPS系统进行定位时,GPS接收机接收到的信息包括测距信号和导航电文,而导航电文包括卫星的空间坐标信息。GPS接收机在某一时刻必须同时接收到五颗以上卫星的信号,然后根据上述信号解算出接收机和卫星之间的距离,然后根据距离交会法演算出测站点的坐标,如图3所示。
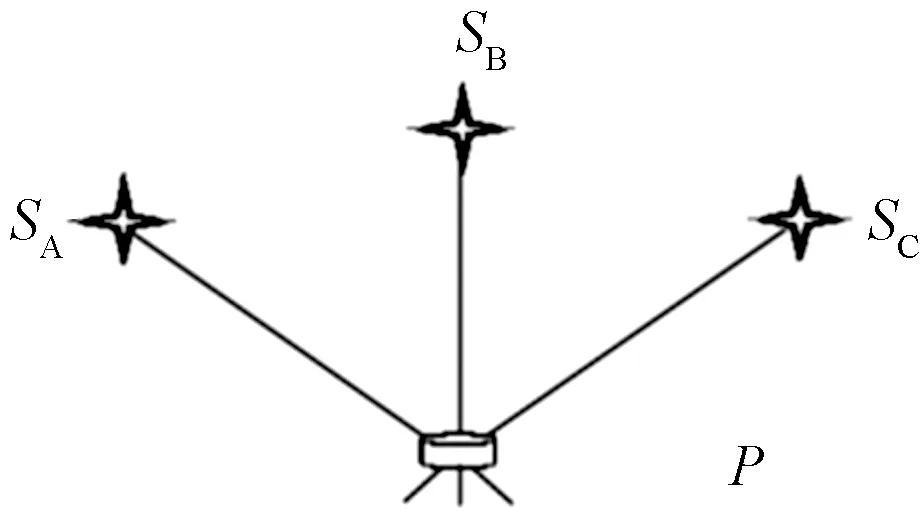
图3 GPS卫星定位原理
设在时刻ti测站点P与三颗卫星A、B、C的距离分别为SA、SB、SC,同时通过解算卫星的电文可以得出此刻三颗卫星的空间坐标分别为Xi、Yi、Zi(i=A、B、C),用距离交会法求解P(X、Y、Z)点的坐标[9]:
(1)
在使用GPS系统进行精密的变形监测时,由于卫星是在高速运动中,卫星的位置坐标也在不断变化中,需要实时测出测站点到卫星的距离以及由卫星电文解算出卫星的实时位置坐标。卫星导航的测距原理有:伪距法定位和载波相位测量定位法。在精密的变形监测中,由于精度要求高,一般使用载波相位测量定位法[10]。
在高层建筑施工过程中,位移测量结果使用的坐标体系一般采用当地的大地坐标体系,而目前GPS接收机获取的坐标为WGS-84大地坐标系是国际通用的协议地球坐标系。为了使用的方便以及与全站仪位移测量数据相互校对,需将WGS-84坐标系统测量成果转换成当地的大地坐标系统[11]。
1.2 全站仪
对施工期除顶部楼层外的其他楼层监测采用Leica TM30全站仪。Leica TM30测量机器人是世界上最先进,最精密的测量仪器之一,测角精度0.5″,测距精度0.6 mm+1 ppm。具有自动识别、自动跟踪和连续自动观测的特点[12-13]。图4所示为广西南宁华润中心东写字楼施工期间在31M层布置的全站仪水平位移监测点示意图。

MXB为西北角点;MDB为东北角点;MXN为西南角点;MDN为东南角点
通过在施工现场建立的测量控制网,运用前方或后方交会法,在不同的观测周期内,通过对同一监测点后期监测的坐标与初始监测的坐标之间的坐标差,可以得到变形监测点的水平位移变形量[14-16]。
2 位移原始监测结果分析
2.1 GPS位移时程
GPS采样频率为5 Hz,3台GPS同时进行监测,其中2流动站安装在施工过程中主体结构楼层顶部,1台作为基准站放置在南宁万象城的屋面上。当主体结构内筒施工至50层时的某一天,GPS测试从上午10:30到次日下午14:30,共28 h。
采集得到的GPS位移原始数据,采用Leica Spider软件反演解算,再通过自编的MATLAB程序转换成当地的坐标体系,以便能够和全站仪测量数据相互核对,再转换成与主体结构两个主轴方向一致的位移分量。

图5 白天GPS1两方向位移变化时程

图6 白天GPS2两方向位移变化时程

图7 夜晚GPS1两方向位移变化时程

图8 夜晚GPS2两方向位移变化时程
取其28 h中某一时段时间约25 min(白天)的GPS信号,得到施工期间楼层顶部两台GPS的X(南北方向)、Y(东西方向)两个方向的位移时程曲线。其中GPS1号机测量得到的两方向位移时程曲线如图5所示,X方向水平位移变化在±5 cm左右,Y方向位移变化在±3 cm左右;GPS2号机得到的结果如图6所示,X方向位移变化在±10 cm左右,Y方向位移变化在±4 cm左右。图7、图8分别为GPS1和GPS2所测量得到的夜晚X、Y方向位移变化进程,在这28 h中另一段时间约1 h(夜间)的位移时程曲线图,由图7 GPS1测试点可知,其X方向位移变化量在±4 cm左右,Y方向位移变化量在±6 cm左右。由图8的GPS2测试点可知,X方向位移变化量在±3 cm左右,Y方向位移变化量在±3 cm左右。
2.2 全站仪位移时程
与此同时,利用全站仪自动跟踪测量程序对31M层8号点(测量点如图4所示)进行了约2 h的位移监测。得到该点沿建筑主轴方向X(南北方向)、Y(东西方向)的位移时程如图9所示。由此可知整个时程位移在两个方向的变化量,X方向在3 cm之内,Y方向在2 cm之内。

图9 31M层8#监测点两方向位移时程
3 HHT变换对GPS测试信号的分析
GPS接收机对被测建筑物测量得到的位移信号,包括建筑物在外部环境荷载作用下的平均位移和脉动位移分量。一般来说,只有把其中的动力(脉动)位移分量提取出来,才可以较为准确地从动力位移分量中得到建筑结构的动力特征等相关信息,而采用希尔伯特-黄变换变换(Hibert-Huang transform,HHT),可以有效地从GPS实测位移信号中,有效地提取出与结构物自身动力特征相关的动力位移信息。
3.1 HHT变换原理
HHT是1998年美籍华人黄锷在希尔伯特变换的基础上提出来的,为分析非稳定或非线性数据信号而设计的信号处理方法。其核心是经验模态分解(empirical mode decomposition,EMD)方法,将复杂的数据分解成多个固有模态函数(intrinsic mode function, IMF),然后通过希尔伯特变换得到其瞬时频率,分析频谱成分。
理论上,被测信号是由一系列复杂的相互不同的、简单的,非正弦函数的分量信号组成。运用EMD法将信号进行分解出来的模态函数,从高频到低频存放在IMF向量中。模态函数满足两个条件:整个数据范围内,极值点与过零点的数量相等或是相差1;极大值点所构成的包络线与极小值点的包络线关于时间轴t对称。
EMD分解的核心是产生IMF的筛选分解过程,具体步骤如下。
(1)对某一原始信号X(t),用三次样条函数曲线对所有的极大极小值点进行插值,并进而拟合出原始信号X(t)的上包络曲线Xmax(t)和下包络线Xmin(t)。
(2)对上、下两条包络曲线求均值就可以得到一条均值曲线m1(t)。
(3)用原始振动信号X(t)减去均值m1(t)得到脉动信号h1(t)。
(4)脉动信号h1(t)不一定是一个IMF分量。一般情况下,它并不满足IMF所需的条件,这时将h1(t)当作原始信号,重复上述步骤,就可以得到:
h2(t)=h1(t)-m2(t)
(2)
(5)若曲线h2(t)不是满足条件的IMF分量,就必须重复上述步骤进行筛选,如此可得第k次筛选的数据曲线:
hk(t)=hk-1(t)-mk(t)
(3)
(6)对于曲线hk(t)是否为一个IMF分量,必须得有一个筛选过程终止的判别准则,一般是通过计算两个连续的处理结果之间的标准差(SD)进行判别,SD公式如式(4)所示:
(4)
(7)当hk(t)满足SD的取值范围时,则把hk(t)作为第一个IMF分量,记为c1(t)。
(8)从X(t)中减去c1(t)得到剩余信号,便是残差r1(t):
r1(t)=X(t)-c1(t)
(5)
(9)把r1(t)看行作一组新的原始信号重复同样的过程,经过多次运算便可以得到所有的残差ri(t),即
ri(t)=ri-1(t)-ci(t),i=2,3,…,n
(6)
(10)当ri(t)成为单调函数,也就是说不可能再从中提取出IMF分量时,整个循环过程就终止。至此原始信号X(t)可由n阶IMF分量和残差r(t)组成:
(7)
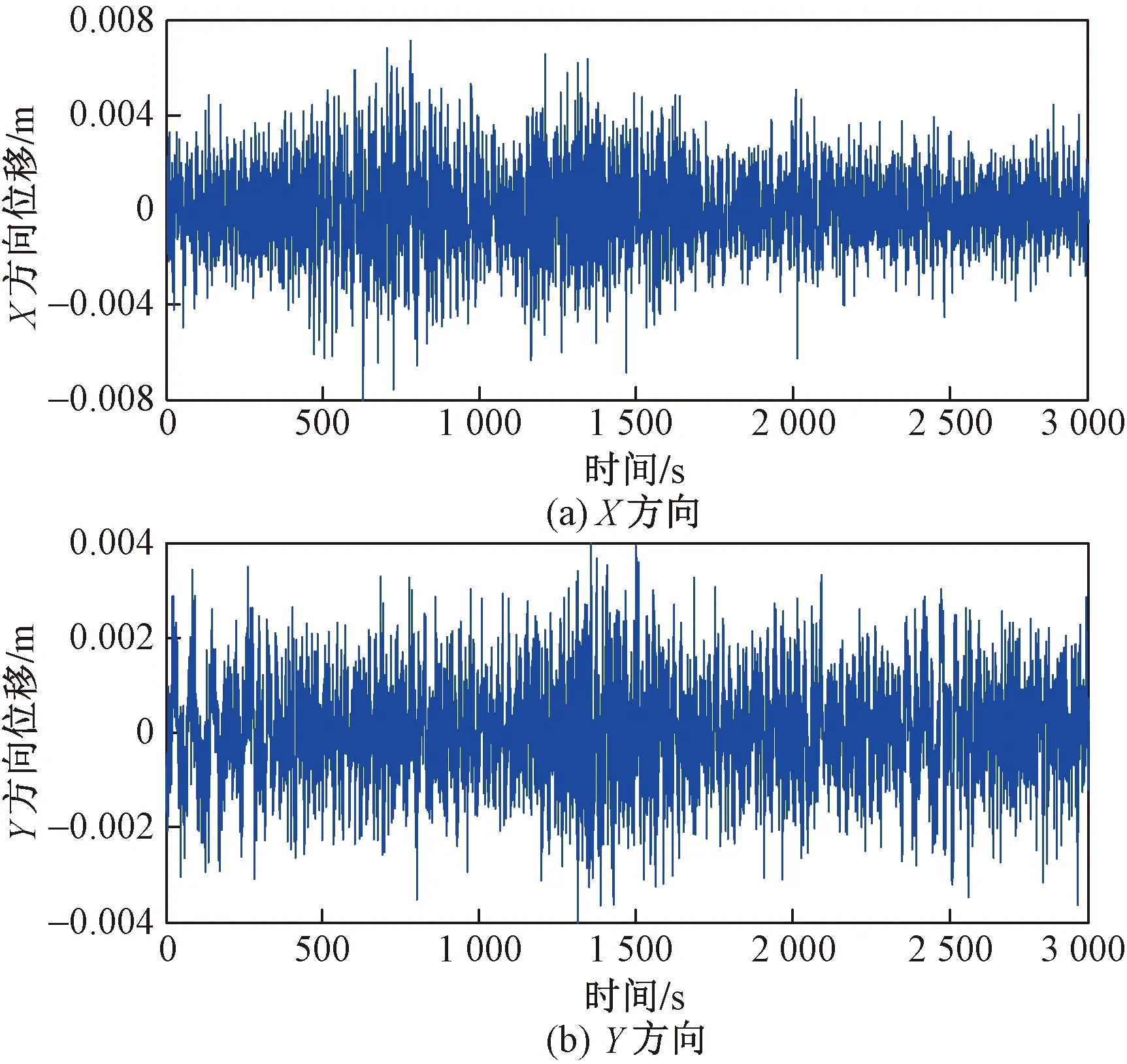
图10 白天GPS1两方向动位移时程
3.2 GPS位移通过HHT处理后的动位移分量
通过HHT,将GPS信号数据经过EMD处理后,除去其位移趋势项(即相当于建筑物在外部环境荷载作用下的平均位移分量),再把其余IMF分量中其瞬时频率与结构自振频率相近的信号加以叠加,得出上述两个时间段内的动位移时程,图10所示为GPS1测试点第一段时间(白天)的动位移时程曲线,X方向水平动位移在±2 cm之内,Y方向动位移在±2 cm之内;图11 所示为GPS2测试点第一段时间(白天)动位移时程曲线,X方向动位移在±6 cm之内,Y方向动位移在±3 cm之内。图12所示为GPS1测试点第二段时间(夜晚)位移时程曲线,X方向水平动位移在±2 cm之内,Y方向动位移在±4 cm之内;图13所示为GPS2测试点第二段时间(夜晚)位移时程曲线,X方向在±2 cm,Y方向在±2 cm 之内。由图10~图13可以看出,原有GPS测量信号经过EMD分解后处理后,得到的位移信号大致能反映建筑物在施工期的变化情况。
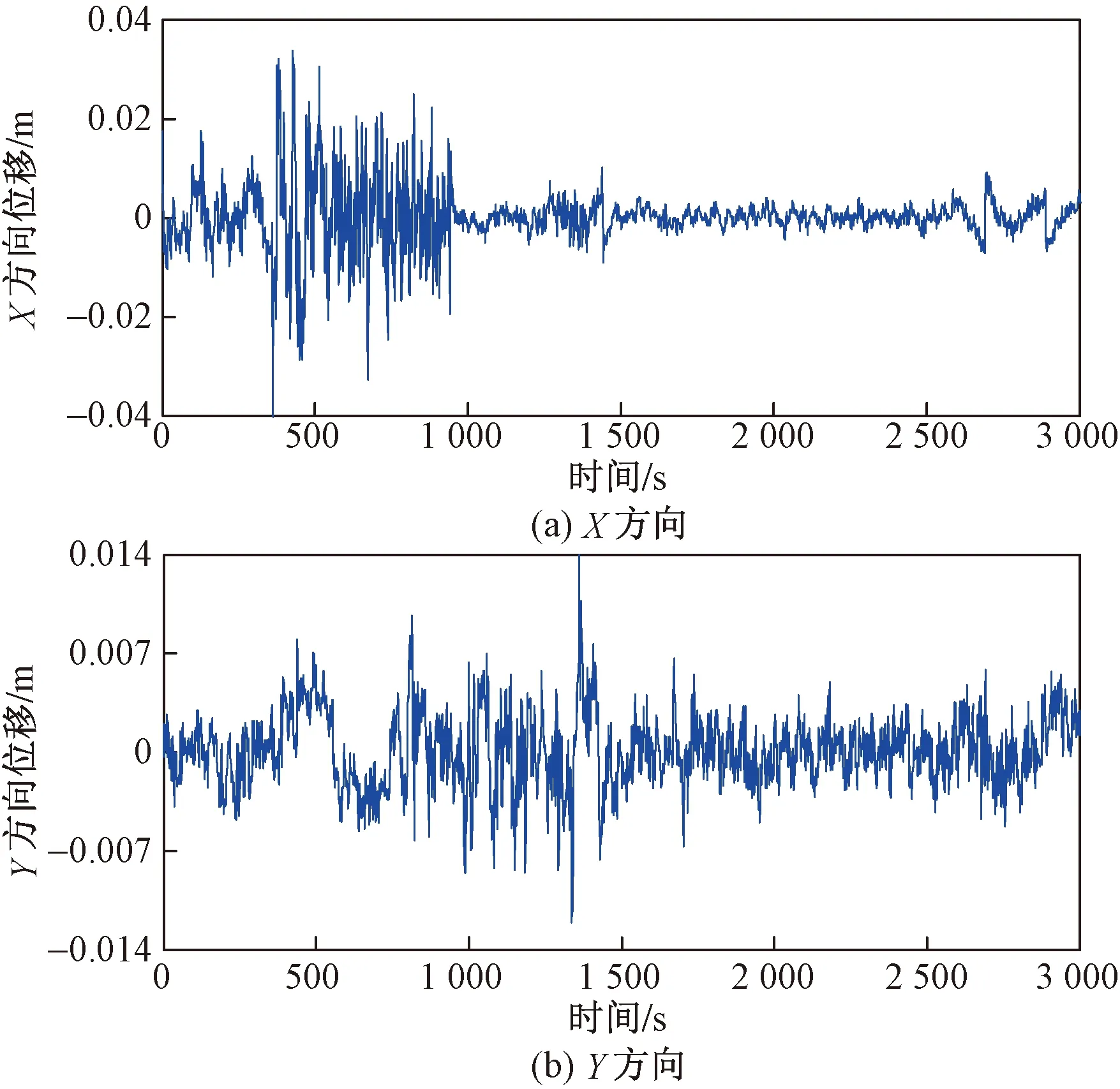
图11 白天GPS2两方向动位移时程

图12 夜晚GPS1两方向动位移时程
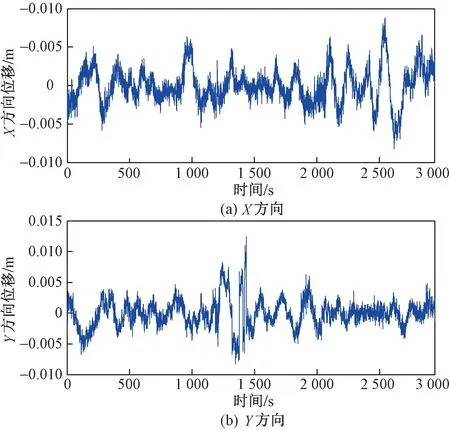
图13 夜晚GPS2两方向动位移时程
3.3 两类仪器所测的水平位移功率谱密度分析
功率谱密度分析(power spectral density, PSD)定义了动态观测信号时间序列的能量如何随频率分布,通过傅里叶变换,将时域内观测的数据转换成频域进行分析。对全站仪水平位移测量监测点所获得的X、Y方向的动位移时程曲线分别进行PSD分析,计算出塔楼在施工过程中整体的频谱特征。
3.3.1 全站仪实测数据PSD分析
将全站仪在同一时段内对31M层8#点进行自动跟踪约2 h的位移实测数据,通过类似方法进行EMD分解,除去趋势项,再把瞬时频率与施工期间塔楼自振频率接近的部分IMF分量进行叠加,得到全站仪测量得到的建筑物在两个主轴方向的动水平位移风量,如图14所示。再进行功率谱分析,得到31M层8#监测点在塔楼X(南北方向)、Y(东西方向)的水平动位移频谱图,如图15所示。由图15可知,与此被测建筑在此施工期间相对应的两个主轴方向第一阶自振频率分别为0.253 9、0.288 3 Hz。

图14 31M层8#监测点位移时程
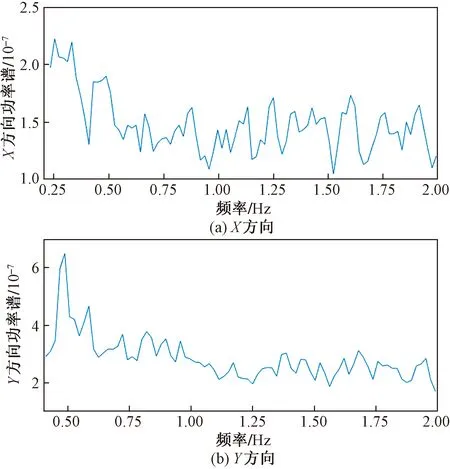
图15 全站仪监测31M层8号点水平动位移功率谱
3.3.2 GPS实测位移经EMD处理后的水平动位移PSD分析
首先将两个流动站GPS1和GPS2实测数据,通过Leica spider软件解算后,再经过EMD处理,再把瞬时频率与施工期间塔楼自振频率接近的部分IMF分量进行叠加,得到其动位移时程,再进行PSD分析得到流动站GPS1和GPS2水平动位移的功率谱图。

图16 GPS1两方向水平动位移功率谱

图17 GPS2测得两方向水平位移功率谱
图16所示为施工期间塔楼顶部的GPS1号接收机数据经过EMD处理后的水平动位移,在X(南北)、Y(东西)向的频谱图;图17为GPS2号接收机实测信号对应的水平动位移,在X(南北)、Y(东西)向的频谱图。由图16、图17可知,可得到在施工期间塔楼在两个主轴方向的第一阶自振频率,其分析结果如表1所示。通过分析表1的数据,GPS1和GPS2识别得到的施工期间塔楼沿两个主轴方向的结构自振频率,与全站仪识别得到的结构自振频率结果相比非常接近,从而验证了GPS测试和全站仪自动跟踪监测结果的正确和有效性,也从另一个侧面反映了运用两类不同位移测试仪器(GPS和全站仪)的位移测试结果,对建筑物结构动力特征辨识的适用性是可以值得信任的。

表1 不同测试仪器识别结构自振频率
4 结论
(1)运用GPS系统和全站仪测量系统,可以全天候自动对施工中的超高层建筑进行水平位移监测,对施工期超高层建筑的位移监测具有重要意义。
(2)采用HHT中的经验模态分解技术,通过去除位移趋势项,可以有效得到与施工期建筑结构在脉动或外加动荷载作用下的水平动位移时程。
(3)使用两类不同位移测试仪器(全站仪和GPS)进行的位移监测结果,经过EMD处理后得到的动位移时程进行的功率谱分析,辨识得到的结构在两个主轴方向的自振频率十分接近,验证了这两种不同测试方法在超高层建筑施工过程中,对结构动力特性的识别结果的正确性和有效性。
猜你喜欢
公民与法治(2022年10期)2022-12-29
新型工业化(2022年5期)2022-06-17
煤气与热力(2022年4期)2022-05-23
矿产勘查(2020年1期)2020-12-28
读者·校园版(2020年19期)2020-09-16
水电站设计(2020年4期)2020-07-16
当代陕西(2019年19期)2019-11-23
智族GQ(2019年9期)2019-10-28
英美文学研究论丛(2018年1期)2018-08-16
大陆桥视野(2016年20期)2016-12-13
