
基于LIN总线的雨量灯光控制系统设计及应用
2020-04-25 11:50吴成加
客车技术与研究 2020年2期
吴成加
(安徽安凯汽车股份有限公司,合肥 230051)
雨量灯光传感器(RLS)是装在汽车上的新型传感器,将红外式雨量传感器以及环境光传感器集于一体,通过LIN总线接口与控制系统进行通讯,可实现前刮水器、前大灯的自动控制。自动雨量控制系统能自动感知车外降雨量,调节刮水器刮水频率,比人工控制更安全。夜间会车时远光灯会给对面车的驾驶员造成干扰,存在事故隐患;在白天车辆进入隧道、车库、桥洞等环境时,因不能及时开启前大灯,也给安全行车带来隐患。自动灯光控制系统可实时感知车外光照情况,自动开启前大灯;在夜间会车时,能自动关闭远光灯。通过软件控制,还可以实现雨天自动关窗或自动开启位置灯提醒行人、车辆注意行车安全等功能。
1 雨量灯光传感器控制原理
1.1 刮水器电机的控制原理
手动控制的汽车刮水器电机工作原理如图1所示,控制单元共有4根线(低速线、高速线、复位线和搭铁线)与刮水器电机相连。低速线和高速线由继电器或刮水器开关控制,图中刮水器开关低速挡接通时,刮水器开关2、4脚短接,高速挡接通时,刮水器开关3、4脚短接,分别给电机低速、高速线圈供电,实现不同电机转速控制;当关闭刮水器开关时,开关1、2脚短接,通过刮水器电机复位开关ab之间接通,将电枢绕组AB短接,产生一个与运转惯性方向相反的制动力矩,实现快速制动,将刮水器停在前挡玻璃下方设定位置[1-2]。
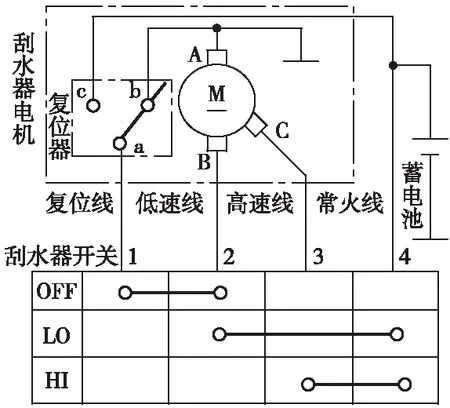
图1 开关控制电源线的双速刮水器电路(图示为停止位置)
在自动控制模式下,由两个硬件接口分别给刮水器电机高速线圈、低速线圈供电,再由软件控制硬件电源的接通或断开,使刮水器电机工作在高速、低速、间歇工作状态。并根据刮水器复位信号来实现快速制动,使刮水器停止工作。
1.2 雨量灯光传感器控制系统工作原理
RLS主要分为电容式和红外式[3-7]。电容式雨量传感器根据雨量的变化引起电容介电常数发生变化,从而引起电容变化,即通过测量电容的变化来感知雨量的大小。红外式雨量传感器工作时,从红外发光二极管射出的光线有一部分由车窗玻璃表面反射回来,通过光学元件聚集后照射到光电二极管上。如果车窗玻璃上有水滴或水层,红外发光二极管光线的反射程度和照射到光电二极管上的光通量就会发生变化。玻璃越湿,因光线折射作用而反射的光线越少,因此可以利用光电二极管的输出电信号计算雨量。光照传感器由环境光线传感器和远距离探测传感器组成,环境光线传感器探测车辆周围环境的光线情况,远距离探测传感器探测行驶方向光线情况。
RLS内部设置了一个LIN通讯接口,与控制系统相连接,不同类型车辆的玻璃参数有所不同,如玻璃厚度、倾斜角度、玻璃曲率、透光率等。另外玻璃的颜色深度会导致透光率发生相应改变。想要RLS达到最佳工作状态,需要对这些参数进行相应的配置或调整,同时,每个驾驶员对雨情变化时刮水器所表现的刮水频率需求(控制系统的灵敏度)也不一样,需要通过一个灵敏度开关来调整RLS的灵敏度[8]。
控制系统会根据上述需求生成相应的控制参数,通过LIN总线接口,将配置参数写入RLS内部。RLS自动感知车外雨量的大小,并将信息传送给控制系统执行刮水器输出。RLS内部的光照传感器可感知车外光照条件的明暗变化,如图2所示,图中展示了一天当中不同时刻传感器采集到的光照强度变化曲线,可根据光照强度的变化区分出白天、黄昏、夜晚、隧道、地下停车场等光照情况。将光照信息通过LIN总线传送给控制系统,由控制系统控制前大灯或位置灯的开启或关闭。
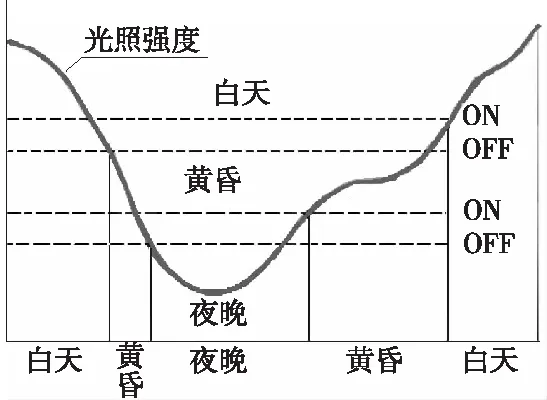
图2 光照强度传感器环境识别示意图
2 雨量灯光控制系统设计及应用
2.1 控制系统设计方案
自动雨量灯光控制系统设计方案如图3所示,雨量灯光控制器(ECU)接收到LIN总线信息,并结合车身模块信息、仪表信息和外部开关信号进行运算,最终输出相应的控制信号,控制灯光和刮水器电机,或通过CAN网络将控制信号发送给车身控制模块。ECU还可以接收仪表台输出的开关信号,控制刮水器、灯光。ECU通过接收仪表台的参数设置、灵敏度调节信息,通过LIN总线将该信息写入RLS进行工作模式及工作状态设置。控制输出部分由车身控制模块实现,车身模块通过电平信号或CAN网络接收ECU输出信号对灯光、刮水器进行控制,并将当前状态反馈给ECU。
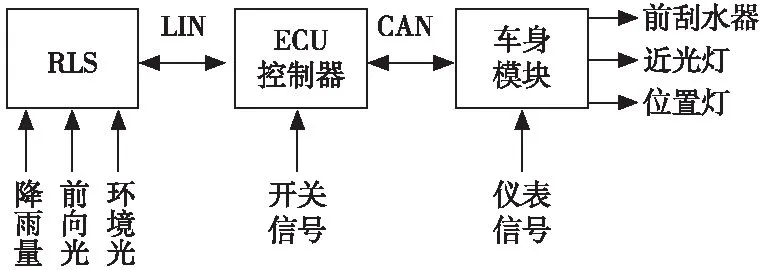
图3 自动雨量灯光控制系统设计方案
为适应不同的应用场景和车型,系统还增加了辅助控制或并行控制功能,即在保留CAN通讯模式情况下,增加了电平控制和并行控制功能;在没有CAN网络系统时,通过ECU外部电平信号实现对车身控制模块控制及信号采集;在ECU停止工作时,可通过仪表台刮水器开关控制刮水器电机输出,提升了系统的冗余性和可靠性。
雨量灯光控制器ECU模块硬件采用Freescale系列8位HCS08微处理器,片上资源包括ADC、MSCAN、SCIx、TPMx、EEPROM等功能模块,它有助于降低成本,增强产品的性能并提高产品的质量[9]。
2.2 雨量灯光控制系统软件设计
1) LIN通讯软件设计。RLS与雨量灯光控制系统ECU之间的LIN总线通讯按照主从模式工作[10-12]。ECU工作在主任务控制模式下,RLS工作在从机模式下,系统中只有一个LIN从机节点。RLS与ECU之间采用应答方式进行通讯,ECU发送给RLS的命令帧信息包括了写入主设备的控制及配置信息,主要是告知传感器当前的外部状态,如温度、速度、玻璃类型、点火开关的状态、刮水器的当前位置等信息。ECU从RLS读取数据是由ECU向RLS发送指定的请求信息帧来实现,RLS接收到ECU请求信息帧后,向ECU返回自身的检测信息及相关的配置信息,包括雨量强度、刮水器速度、外部环境光检测状态、软硬件版本信息等内容。为了保证LIN的通信具有可预测性,ECU在网络系统设计阶段对上述信息的发送通过确定调度表进行间隔发送,负责调度网络各帧发送的顺序,为每条帧分配发送时间间隙。
2) CAN通讯软件设计。ECU模块与车身控制模块之间的通讯采用CAN通讯方式。ECU模块在接收到RLS的雨量及灯光控制信息后,对信息进行解析,获得刮水器电机的控制信息及灯光控制信息,将其转换为CAN信号,同时判断ECU的外部输入端口、采样信息,综合判断后输出控制信息,并通过CAN网络发送给车身控制模块,由车身控制模块控制灯光、刮水器工作。当降雨停止,刮水器刮水片到达前挡玻璃下限位置,刮水器电机复位输出信号时,该信息被ECU采集,ECU输出停止信息,并通过CAN网络输出给车身模块,停止刮水器的输出。
2.3 应用效果
1) 通过喷壶分别模拟不同降雨量情况,对系统进行测试,并对RLS输出的雨量信号、ECU接收到的刮水器电机复位信号进行同步监测,一个典型的刮刷过程如图4(a)所示。向前挡喷水时,系统通过检测RLS的测量值,并根据降雨量的大小和频率执行相应速度的输出;停止喷水后,当玻璃上的水被刮净时,刮水器电机停止输出。
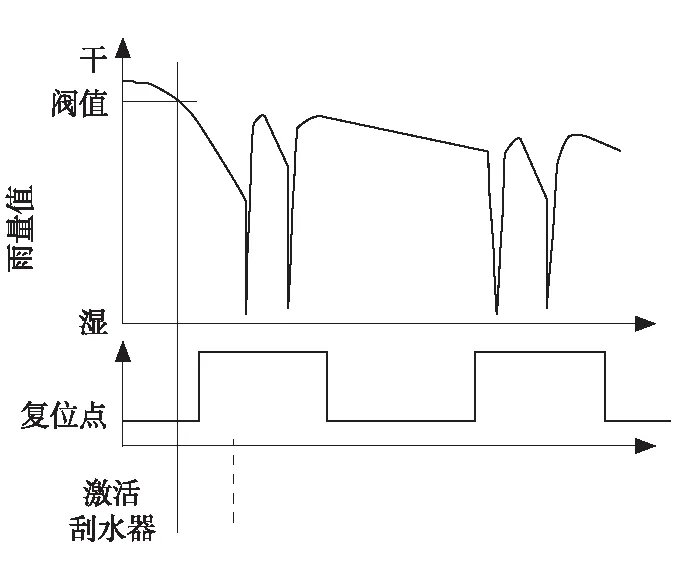
(a)刮水器的刮刷过程
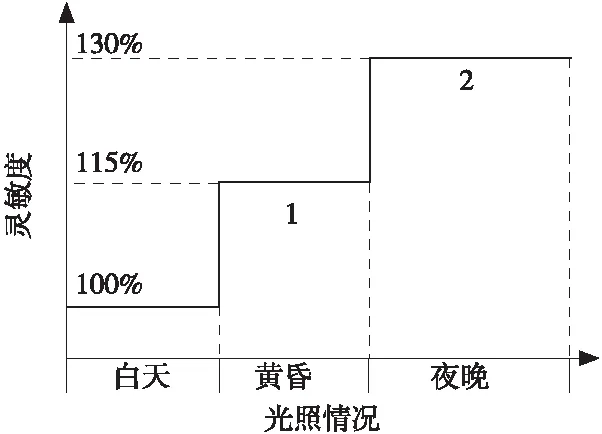
(b)光照强度与传感器的灵敏度图4 刮水器系统应用效果
2) 当环境光照强度改变时,为更好地适应光照变化即时开启灯光,软件自动优化传感器的光照灵敏度,其优化等级取决于外部环境光照强度,如图4(b)所示,白天外部光线较强,传感器灵敏度为正常值,灯光关闭。当外部光照强度减弱时,灵敏度自动增加,如果软件判断外部光照强度减弱到其阀值时,软件判断为黄昏状态,ECU输出位置灯开启信号。当外部环境光进一步减弱时,光照传感器灵敏度进一步增加,如果软件判断外部光照强度减弱到其另一阀值时,判断为夜晚状态,ECU输出位置灯和近光灯开启信号。
3 结束语
本文论述的基于LIN总线接口的一体式雨量灯光传感器的自动控制系统与车身电器控制系统相连接,可实现联动控制、辅助控制或独立控制,可广泛应用于各种不同类型的车辆前刮水器和前大灯的自动控制,替代传统手动操作,能够提高驾车的安全性和舒适性。
猜你喜欢
科学家(2021年24期)2021-04-25
小读者(2021年2期)2021-03-29
安徽农学通报(2020年16期)2020-10-30
水能经济(2018年11期)2018-10-19
热带农业科学(2018年4期)2018-09-26
现代农业科技(2017年4期)2017-04-10
微型计算机(2009年12期)2009-12-21
现代电子技术(2009年14期)2009-09-05
中国市场(2004年9期)2004-09-23
