非线性决策函数下的图像边缘断口修复
2020-04-26 01:33王栿栋
科技创新与应用 2020年11期
关键词:断点
王栿栋


摘 要:图像边缘是在图像处理和图像识别中经常会用到的特征。很多场合下由于各种原因会使得原本应该连续的边缘出现局部断点,从而使原本的同一特征要素割裂。这会影响识别、判断等后期处理。对此提出一种基于决策理论的图像边缘断点修复算法。以断点之间距离、断点连线矢量、断点周围边缘方向等为参考,提取特征向量。然后通过特征向量降维处理,最后设计一个非线性决策函数来判断哪些断口应该恢复连接。实验证明该算法具有很好的断口分类能力。
关键词:图像边缘;断点;特征向量降维;非线性决策函数
中图分类号:TP391.4 文献标志码:A 文章编号:2095-2945(2020)11-0007-05
Abstract: Image edges are often used in image processing and recognition. For a variety of reasons, breakpoints appear on the edges in many cases. Subsequent processing such as recognition or judgment will be affected by these breakpoints. To repair breakpoints, we proposed one algorithm based on decision theory in this paper. We extract feature vector are extracted based on distance and vector between breakpoints and distribution of neighbour points. By reducing the dimensionality of feature, a nonlinear decision function is designed to determine which breakpoint pairs should be connected. Experiments prove that this algorithm can greatly improve the classification performance.
Keywords: image edges; breakpoint; reducing the dimensionality of feature; nonlinear decision function
1 概述
在數字图像处理领域中,一幅灰度图其最原始的信息就是每个像素对应的位置和灰度值。一般情况下全图像素数量巨大,所含信息量庞杂。要从这些最原始的图像中提取有用信息,就必须从中分割出有用的、感兴趣的部分。图像的边缘线就是其中典型的一种。图像的边缘检测是数字图像处理中一项常见又基础的任务。目前为止,已有Marr-Hildreth,Canny[1], Kirsch[2] Laplacian[3]等很多成熟的传统边缘检测算子[4]。也有基于小波分析技术、神经网络、数学形态学等较新的边缘检测方法[5-7]。但面对实际情况复杂多变的图像,各边算子下的缘检测提取结果都可能出现边缘断口情况。该文针对图像边缘检测中原本不应出现的断口情况,探索了一种基于非线性决策函数的断口修复方法。该算法将高维特征向量的分类决策问题降维为简单的2维特征向量决策问题,使算法简单高效。
在判断哪些断点应该连接修复的问题上,目前经常使用的基于形态学中膨胀算法简单方便,但它仅仅根据断口距离大小来确定是否重新连接[8,9]。而且膨胀操作会加粗原有的单像素边缘,使其与原始轮廓边缘产生误差。文献[10]采用了直接对单像素边缘进行分析的方法。但在判别断口是否应该修复连接的问题上,采用了按各个参数指标的逐步排除的方法。如此就把确定断口形状的各特征要素机械地隔离开了。文献[11]单独提取了有关断点的梯度,等照度线曲率等的初始特征。并将各特征指标的线性和作为边缘延伸依据。虽然上述各文献考虑特征值数量不一,从决策角度来看,上述文献中都只使用了简单的线性判函数。当面对比较复杂轮廓图像时,容易产生断口的错误修复连接。而该文在综合考虑确定断口形状的因素后,提取最能代表断口形状的几何特征向量。然后设计一个合理的非线性决策函数,用它来判别这些断口点是否需要修复连接。实验证明其分类效果良好,具有重要的现实意义。
2 算法流程
在本算法之前,需对某一图像进行前期的预处理,这个过程主要采用一些经典的图像处理算法,如灰度变换、中值滤波、伽马变换等来提高原始图片对比度,目的是凸出图像的边缘轮廓[12]。然后通过Canny算子提取边缘二值图。这些具体过程不在该文展开。接着是本算法,它由以下几部分组成。(1)断点位置坐标确定。这个环节主要是设法寻找边缘图像中的断点所在的位置,是该文的基础工作。(2)断口邻近边缘点分析。要在断点基础上,再分析其周边与它同一连通分支上点的分布情况,只有这样才能综合分析该断口是否需要修复。这是该文的必要步骤。(3)断口特征向量设计。为了便于计算机判断处理,需要总结以上两个步骤的基本信息,然后提取出合理的特征值向量。这是该文的重要部分。(4)决策规则制定。这部分工作提出了一个基于非线性决策函数的决策规则,用它来判定断口该不该重新修复连接。这是该文的关键点。
由上述4大部分组成的修复流程见图1所示。
3 算法原理
3.1 断点位置坐标确定
在数字图像中,像素之间的位置关系有邻接、连通、边界等。本文中的处理对象是二值单像素图像边缘。判断这些像素点是否为断点,要通过观察它的八个邻接点灰度状况。这种邻接状态数量是有限的。然后采用一个3×3的空间滤波器作为检测算子。空间滤波器的系数采用二进制位权值,其分布见图2。设被考察像素点(图中黑色像素点)坐标为(m,n),并定义如下断点值q。其中f(gm+i,n+j)表示坐位置为
(m+i,n+j)像素点的灰度值,aij表示滤波器对应权值。则被考察点能视为断点的邻接状态只有16种。
与之对应有16个不同的断点值。除此外的其他情形在本文中均判定为非断点。
3.2 断口邻近边缘点分析
描述断口特性,除了需要确定上述的断点图像坐标位置外,还有一个很关键的信息就是与断点直接相连的初级通路像素分布[13]。如图3所示。这两个信息基本确定了断点所在的位置和断点所属边缘局部形状。为了确定这些周边初级通路像素坐标位置,本文采用局部领域限制与边界追踪法[14]。见图4,在这幅被处理的边缘图像中,黑色像素是断点。为了描述与这个断点相连的周边局部领域的初级通路像素分布情况。首先以这个断点像素为基准,以一定像素量(此处为5个像素)为观察领域半径,然后在这个半径领域内进行局部边界追踪,图4所示的斜纹像素点便是追踪结果,这是一条与断点像素直接相连的局部初级通路像素。通过追踪,记录了这些像素的排序和坐标值(此处假设断点处为像素坐标原点)。
3.3 断口特征向量设计
在以上述断点的识别确定和断点局部领域边界追踪的基础上,分析什么样的一双断点才有可能来自原本应该连续的边缘?并把它重修修复连接。见图5。
(1)断点之间的距离。设被考察的断口由p1和p2两个断点组成。设这个两个点的距离为d=。如果它们来自同一条边缘上的断点,则合理的假设这两个距离不能太远。设断点的局部追踪半径为r,则断点的相对距离设为m=d/r。只有当m?燮1时,即p1,p2这两个断点共处于图5所示的公共追踪范围内时,才认为这两断点来自同一边缘上。
(2)两断点之间的向量。在图5中,从p1到p2的单位向量描述了断口连线的走向。它可以成为描述断口形状特性之一。
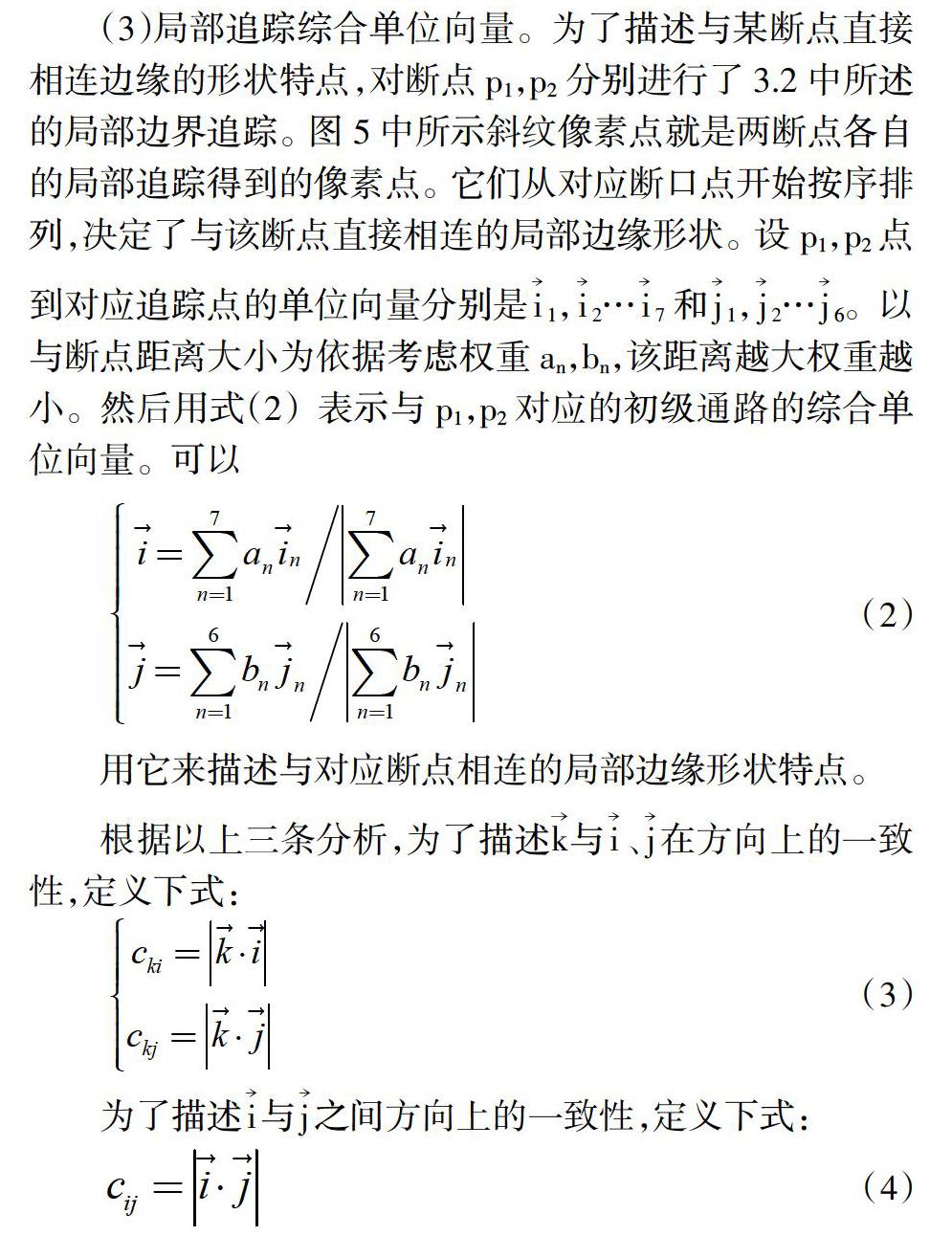
(3)局部追踪综合单位向量。为了描述与某断点直接相连边缘的形状特点,对断点p1,p2分别进行了3.2中所述的局部边界追踪。图5中所示斜纹像素点就是两断点各自的局部追踪得到的像素点。它们从对应断口点开始按序排列,决定了与该断点直接相连的局部边缘形状。设p1,p2点到对应追踪点的单位向量分别是1,2…7和1,2…6。以与断点距离大小为依据考虑权重an,bn,该距离越大权重越小。然后用式(2) 表示与p1,p2对应的初级通路的综合单位向量。可以
(2)
用它来描述与对应断点相连的局部边缘形状特点。
根据以上三条分析,为了描述、在方向上的一致性,定义下式:
(3)
为了描述与之间方向上的一致性,定义下式:
从以上的讨论可知,采用向量[m,cki,ckj,cij]T作为断口总体形状特征向量是较为合理的[15]。
3.4 决策规则制定
断口特征向量[m,cki,ckj,cij]T组成的特征空间是一个4维空间。如果设计一个4维特征空间中的设分类器,这个分类器将4维特征空间中的特征向量分成两类。一类是应该修复连接的断口,一类是无需修复连接的断口。此时两者之间的决策面是一个多维的超平面或超曲面。所以如果直接从这4维特征向量出发分析决策面,会比较复杂抽象。如何更合理设计这个分类器?决策面要如何确定[16]?
为简化上述问题,该文采用的是特征向量降维映射的办法[17]。如果说由两个断点及周边组成了一个可能断口,那么描述这个断口特性可以归纳为两个大的方面。
(1)断口方向一致度。也就是说如果这个断口本该连续的,则cki,ckj,cij这三个用来描述断口方向一致性的分量要得到保证。为此按式(5)定义一个断口方向一致度s。它是一个关于[m,cki,ckj,cij]T的非线性函数。
上式中,将s的取值归一化,它的取值范围限制在0~1之间。s越大断口方向越一致。期间还引入断点的相对距离m,这是因为在考虑断口一致度时,参看图5。当断口很小,即m值很小时,确定断口方向一致度主要由cij确定。而当断口较大,即m值很大时,则在确定断口方向一致度时更多考虑Cki,Ckj的影响。
(2)断点的相对距离m,这个指标在3.3中已详细提及。它主要描述断口相对大小。
经过以上分析,我们可以把原来描述断口形状特征的向量[m,cki,ckj,cij]T,映射为一个二维特征向量[m,s]T。對应地,特征空间由4维降为2维。这非常有利于问题的简化和处理。接下来相当于把问题转变为在2维特征空间中设计一个分类器。对应的决策面则呈现为一条2维平面上的曲线。
当判断一个断口是否应该重新修复连接的时候,一般来说当m越大的时候,我们要求s越大。而当m越小的时候,对s值要求越低,直到m=0,则不管s大小,它本身就已经是一个连接点了。在2维特征向量[m,s]T基础上,什么样的2维曲线作为决策面才是合理的呢?实验证明,如果基于一般线性决策函数的分类决策,则分类结果出现很大的错误率。如图6所示,这是一幅边缘纹路较为复杂的图像,其中只有一个期望被修复的断口(小方框内所示)得到了顺利修复。三角框内本应该修复的断口则没有得到修复。其余圆形框内的断口都是错误修复连接。所以合理的2维断口特征向量[m,s]T的决策面肯定不能是一条简单的平面直线,它应该是某一条更合理的平面曲线。从上述的分析可知s的理论取值区间为0~1。它与m是正相关的,但非正比关系。一个合理的设想为当m?燮m1时,此时断口几乎相连,可以对断口作要求s?叟s1,直到m=0时,对s值不作任何要求。而当m?叟m2时,断口间距开始明显,对断口方向一致度s要求迅速上升为s?叟s2,直到m=1时,必须满足s?叟s0。从这个分析出发,设计一个关于m,s的“S”型函s=,r0,r1待定。它在特征向量二维平面中的曲线形状如图7所示。其函数特性符合该文分析要求,以这条曲线为决策面,断口的分类决策效果提升明显。
取m1=0.2,m2=0.25,s1=0.4,s2=0.75,s0=0.98便可得到一个如式(6)所示的具体的“S”型函数:
结合图7和式(6)就可以直观清晰地设计一个式(7)所示的决策规则。这是一个关于[m,s]T的非线性判别函数的决策规则。也是间接关于[m,cki,ckj,cij]T的非线性判别函数的决策规则。
如果当被考察的断点p1在观察领域半径r内没有找到对应的断点,则采取r内的距离p1最近的p2作为对应点,见图8。然后以p1,p2考察断口情形。此时p2点因为不是断点,以其为起点的初级通路不止一条。这时只要将与p2点相关的每条初级通路分别单独考虑,然后通过上述方法单独进行决策。当至少一条初级通路情形下p1,p2被决策为应该修复断口,就判定该断口为应该修复连接。
4 实验结果
采用上述断点分类决策与修复方法后的实际效果见图9所示,图9(a)的断口是最为普遍的情形。图9(b)为断口相对距离m与方向一致度s较小情形。它们都得到顺利修复。而从图9(c)与图6的对比可以看到,在面对较为复杂的轮廓边缘图时,采用本方法后,应该修复连接的断点都得到了顺利的修复。同时没有出现错误的断口修复连接。
5 结束语
该文首先设计一个基于二进制权值的滤波器,来识别所有断点。然后分析并定义一个4维断口特征向量。为使决策问题得到简化,经过映射把这4维特征向量降为2维特征向量。这使决策分类问题变得更加方便。当面对较为复杂的边缘图像时,如果基于一般线性规则设定一条直线作为决策面,发现分类效果较差,错误率也较高。而采用了该文设计的非线性决策算法后,在不明显增加运算复杂度的基础上,断口的分类准确率得到了大大提高。
参考文献:
[1]王文豪,姜明新,赵文东.基于Canny算子改进的边缘检测算法[J].中国科技论文,2017,12(8):910-915.
[2]张琳.基于Kirsch算子的图像边缘检测[D].大庆:东北石油大学,2015.
[3]Cheng Xiansheng. An Edge Detection new algorithm based on Laplacian Operator[C]//ICCSN,2011: 217-221.
[4]王敏杰,杨唐文,韩建达,等.图像边缘检测技术综述[J].中南大学学报(自然科学版),2011,42(1):811-816.
[5]李靓瑶.小波边缘检测在视觉图像分析中的应用研究[D].哈尔滨:哈爾滨理工大学,2017:7-26.
[6]王铮,李兴民.基于四元数和SOM神经网络的彩色图像边缘检测[J].计算机应用,2012,32(2):510-513.
[7]王芳,钱炜,李文超.基于数学形态学的图像边缘提取方法[J].机械工程与自动化,2015(1):46-48.
[8]贾迪,董娜,孟祥福,等.一种图像的连续性边缘提取方法[J].计算机工程与科学,2014,37(2):384-389.
[9]蒋鑫.高光谱图像融合中的边缘修复研究[D].南京:南京理工大学,2012.
[10]于广婷,朱聪,李柏林,等.光学图像中一种新的边界断点连接方法[J].计算机应用研究,2014,31(4):1264-1266.
[11]徐毅,邓廷权.基于路径形态学的图像边缘连接方法[J].计算机工程与应用,2014,50(7):180-185.
[12]Rafael C. Gonzalez,Richard E. Woods. Digital Image Processing[M]. Englewood: Prentice Hall Press, 2007.
[13]耿素云,屈婉玲,张力昂.离散数学[M].北京:清华大学出版社,2018.
[14]胡晋山,康建荣,张琪,等.一种八邻域图像边界追踪改进算法[J].测绘通报,2018(12):21-25.
[15]王志瑞,闰彩良.图像特征提取方法的综述[J].吉首大学学报(自然科学版),2011,32(5):43-47.
[16]边肇祺,张学工.模式识别[M].北京:清华大学出版社,1999.
[17]李婵娟.高维数据降维处理关键技术研究[D].成都:电子科技大学,2017.
猜你喜欢
学苑创造·C版(2022年8期)2022-06-18
辽河(2022年4期)2022-06-09
中国现代医生(2020年29期)2020-12-14
电脑报(2019年20期)2019-09-10
初中生世界·九年级(2019年6期)2019-08-15
科技视界(2017年16期)2017-11-11
软件导刊(2017年4期)2017-06-20
新媒体研究(2014年19期)2014-11-27
成才之路(2009年32期)2009-06-08
棋艺(1999年21期)1999-06-14