
基于Matlab/FlightGear的四旋翼无人机仿真实验平台设计
2020-04-30 06:49张明家冯秀
无线互联科技 2020年6期
关键词:仿真实验
张明家 冯秀


摘 要:文章以六自由度四旋翼无人机模型为基础,设计并建立了基于FlightGear的仿真实验平台。该平台基于Matlab/Simulink实现无人机模型及控制系统的仿真设计,使用Stateflow实现无人机起飞、轨迹跟踪飞行、返航、降落的模式切换,并与FlightGear进行对接,实现完整飞行场景下四旋翼无人机的三维实时可视化显示。
关键词:四旋翼无人机;FlightGear;模式切换;仿真实验
近年来,无人机应用行业处于快速发展阶段,国内职业院校纷纷开设无人机应用技术专业。无人机组装与调试是无人机应用技术专业的一门重要专业基础课程。无人机的调试通常在地面站软件中进行,包括安装固件、机架选型、遥控器校准、电调校准、电机测试、飞行模式设置、调节比例—积分—微分(Proportion Integral Differential,PID)参数等步骤[1]。但在进行飞行模式设置与调节PID参数时,无法直接查看调试效果,需要实际飞行后再进行反复调试,效率较低且存在一定的安全隐患。针对此问题,本文采用仿真可视化技术,搭建无人机调试实验平台,实时显示无人机的姿态和位置信息,幫助学生加深对无人机飞行控制过程的理解和掌握。
1 实验平台的建立
1.1 控制器设计
本文采用的四旋翼无人机是“X”字型,电机分为两组,1号和3号电机顺时针旋转,2号和4号电机逆时针旋转,通过不同的油门指令,使其具备俯仰、横滚、偏航、纵向运动状态[1]。
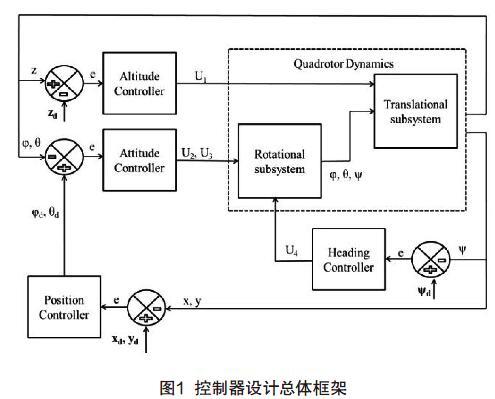
本文的无人机在螺旋桨产生的外力和力矩作用,形成线运动和角运动,输入航迹点数据模拟无人机的期望位置值,采用串级PID算法实现位置控制器,使无人机实际位置与期望位置保持一致,同时,将期望位置转换为期望角度作为姿态控制器的输入值,姿态控制器输出控制量信号作为油门指令输入到系统模型中,最终确立油门指令与无人机位置和姿态之间的映射关系[2]。控制器设计总体框架如图1所示。
1.2 飞行模式切换
四旋翼无人机的半自主飞行功能,包含遥控器指令和飞行器自身事件变化触发无人机的飞行状态发生改变。通常四旋翼无人机遥控器上的飞行模式开关包含以下几种功能:定高飞行、自稳飞行、一键返航、自动着陆、留待模式[2]。
本文基于Stateflow工具箱在仿真系统中利用状态机实现四旋翼无人机的模式切换,从而验证各种飞行模式下以及模式切换过程中,系统模型及控制系统的工作状态、稳定性及性能。状态机转移条件及控制器指令如表1所示。
1.3 FlightGear的连接
FlightGear是一个开源的三维飞行模拟软件,提供了丰富的输入输出接口,可以输入输出仪表数据、操纵数据等,配置简单,并且可以在Simulink中通过运行脚本文件直接调用[3]。本平台采用Simulink库中的“Pack net_fdm Packet for FlightGear”模块将仿真得到的无人机姿态、位置等数据封装起来,通过“Send net_fdm Packet to FlightGear”模块将数据通过UDP接口发送给FlightGear。在脚本文件中设置FlightGear的输入输出接口[3],其中,Protocol设置为Native-fdm,Medium设置为socket;Hz设置为30,Direction设置为in,端口选择5502,选择UDP模式。脚本内容如下所示:
--native-fdm=socket,in,30,127.0.0.1,5502,udp
--native-ctrls=socket,out,30,127.0.0.1,5505,udp
配置完成后,即可在仿真平台上实时显示无人机三维模型的飞行效果。
2 实时仿真实验演示
2.1 PID参数调节实验
常规的PID控制由比例项(P)、积分项(I)、微分项(D)3部分组成。串级PID控制器的参数调节可分为内环参数调节、外环参数调节,以无人机单通道姿态(俯仰)控制系统为例,采用试凑法,分别对比例项参数、积分项参数、微分项参数进行修改。实验结果如图2所示。
(1)比例项参数的影响:由小变大,响应速度加快,超调量变大,稳定性变弱。(2)积分项参数的影响:积分环节消除稳态误差,过大的积分会造成超调。积分会造成响应滞后,积分的饱和作用。(3)微分项参数的影响:引入阻尼,减小系统超调量,调节时间变长,放大系统噪声,抗干扰能力减弱。PID参数调节过程,通常是取3部分的折中,解决控制系统的稳定性与准确性的矛盾。
此平台还可以开设的实验项目有:(1)单通道姿态(滚转、俯仰、偏航)控制系统仿真实验。(2)高度控制系统仿真实验。(3)横侧向姿态控制系统仿真实验。
2.2 飞行模式切换实验
四旋翼无人机的模式切换仿真得到的实验数据,可以观察对应的位置变化过程,如图3所示。起始阶段MODE值为0,无人机根据遥控器指令手动飞行,1 s后MODE值切换为3,进行轨迹跟踪飞行,经过正方形航迹点P1(0, 0, -50),P2(-50, 0, -50),P3(-50, 25, -50),P4(-50, 50, -50),P5(-25, 50, -50),P6(0,50, -50),P7(0, 25, -50),P8(0, 0, -50)完成轨迹跟踪飞行后,MODE值切换为1,进入返航状态,到达终点位置上方后,MODE值切换为2,进入降落状态,飞行到达终点。
跟随无人机模式的切换,可以实时查看四旋翼无人机在空中飞行姿态以及位置的变化,非常直观和方便。FlightGear运行场景如图4所示。
3 结语
在该仿真实验平台上,可以开展四旋翼无人机的控制器调参实验、飞行模式切换实验,不受空间和时间的限制,同时,可以规避实物调试以及试飞可能带来的安全风险。通过三维立体实时显示,让学生对无人机调试效果有直观地认识和理解,对无人机飞行控制过程有一个全面、系统的把握,完成无人机飞行全过程的模拟与验证,为后续的无人机开发与设计等课程打下坚实的基础。
[参考文献]
[1]QUAN Q.Introduction to multicopter design and control[M].Singapore:Springer Materials,2017.
[2]黃芳艳,刘永福,林镇滔,等.基于四旋翼无人机的组装与调试研究[J].科技与创新,2019(16):38-39.
[3]杨姗姗,王彪.基于FlightGear的三维可视化飞行控制仿真实验平台的设计[J].实验室研究与探索,2017(7):113-117.
Design of simulation experiment platform of quad-rotor UAV based on Matlab/FlightGear
Zhang Mingjia, Feng Xiu
(Nanjing Polytechnic Institute, Nanjing 210048, China)
Abstract:Based on a six-degree quad-rotor UAV, a simulation experimental platform based on FlightGear is presented in this paper. The platform implements the simulation design of UAV model and control system based on Matlab/Simulink. The model switching of UAVs take-off, track tracking, auto-return and landing flight is realized based on Stateflow tools, and the 3D real-time visualization of the quad-rotor UAV under the complete flight scene is implemented by using FlightGear simulator.
Key words:quad-rotor unmanned aerial vehicle; FlightGear; model switch; simulation experiment
猜你喜欢
商情(2017年1期)2017-03-22
中国教育技术装备(2016年19期)2016-12-27
考试周刊(2016年64期)2016-09-22
中国教育技术装备(2015年22期)2016-01-09
现代电子技术(2015年17期)2015-09-23
科技与创新(2015年18期)2015-09-11
中国教育技术装备(2015年12期)2015-07-21
中国人口·资源与环境(2015年2期)2015-04-16
