
关于AirNet空管自动化系统监视数据处理的研究
2020-05-03 14:07杨炎熙
河南科技 2020年5期
杨炎熙
摘 要:AirNet空管自动化系统由中国民航第二研究所研发,是一套基于Linux多任务操作系统的空管自动化系统。该系统主要对监视数据和飞行计划数据进行处理,为管制员提供航空器在空中的飞行动态信息、安全间隔信息和相关告警信息。AirNet空管自动化系统是管制员进行空中交通管制的重要工具,是空管运行部门主要的空中监视手段。本文主要对AirNet空管自动化系统监视数据处理功能进行研究,以便更好地掌握和使用该系统。
关键词:AirNet;空管自动化系統;监视数据;前置处理;融合处理
中图分类号:V355文献标识码:A文章编号:1003-5168(2020)05-0041-03
Abstract: The AirNet air traffic control automation system was developed by the Second Research Institute of CAAC, which is a set of air traffic control automation system based on Linux multitasking operating system. This system mainly processes surveillance data and flight plan data, and provides controllers with flight dynamics information, safety interval information and related warning information of the aircraft in the air. The AirNet air traffic control automation system is an important tool for controllers to conduct air traffic control, and it is the main air surveillance method of air traffic operation departments. This paper mainly researched and analyzed the monitoring data processing functions of the AirNet air traffic control automation system, in order to better master the use of the system.
Keywords: AirNet;air traffic control automation system;surveillance data;pre-processing;fusion processing
AirNet空管自动化系统采用开放式体系和分布式计算的系统结构,能够处理多种监视数据,具有处理精度高、时效性强、系统运行稳定等特点[1-2]。系统航迹进行各种告警处理,对雷达目标高度进行QNH修正,在雷达目标丢失后能够通过飞行计划外推显示。
1 AirNet空管自动化系统的特性
1.1 可靠性和可用性
系统在架构体系上体现出容错性和可用性管理功能。可用性管理功能通过一套分层的服务来提供高级别应用所需的良好环境,这种方法通过封装底层函数简化了应用软件。系统的所有设备能够保证满足大多数空管自动化系统环境可靠性、可维护性的严格标准[3]。系统使用的设备可以进行自检测、错误检测和隔离,系统所有关键部分都采用冗余技术。
1.2 开放系统结构和模块化设计
系统内部采用标准TCP/IP和UDP/IP通信协议,具备标准的雷达数据、电报数据、AIDC、ADS等接口,能与外部系统实现信息的互联。每个主要的子系统功能都由独立的功能模块实现,每个模块都封装了它所需要的数据,通过这种方法定义好内部通信标准。
2 AirNet空管自动化系统的设计
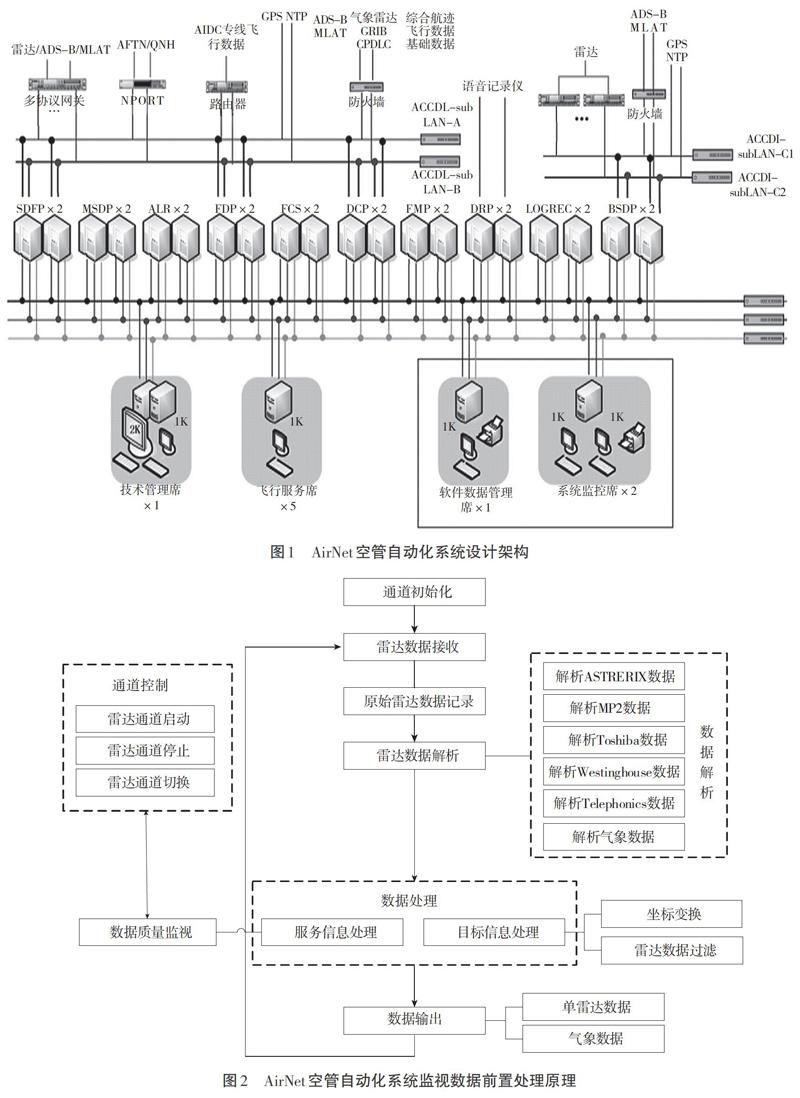
如图1所示,系统划分为三套网络:工作网络(A网、B网)保证服务器和工作站间的信息交换,旁路网络(C网)采用独立的交换机、独立的旁路服务器,以解决A、B网瘫痪后雷达数据的不间断向管制席位显示的问题。
3 AirNet空管自动化系统监视数据处理研究
3.1 监视数据前置处理原理
如图2所示,监视数据前置服务器(SDFP)通过外部接口,将接收的雷达数据(点迹、航迹、点航迹)、ADS-B数据、MLAT数据、气象雷达数据进行质量监控、双通道数据比选、格式转换、坐标变换等处理,然后将预处理后的监视数据提供给监视数据融合服务器(MSDP)使用。
监视数据融合服务器(MSDP)对预处理后的监视数据行融合处理、单通道目标过滤、航迹动态跟踪、目标QNH高度修正、高度跟踪处理、航迹过载处理等。对融合后的综合航迹进行平滑处理,防止航迹由于数据源的不稳定而出现跳变。最终将形成稳定的系统航迹进行输出,显示终端(SDD)接收到处理后的系统航迹进行输出显示,为管制员提供空中航空器实时的动态信息。
3.2 监视数据前置处理
3.2.1 监视数据接收和解析。监视数据前置处理系统(SDFP)由监视数据分配器DS-4、协转设备MPDC和两台互为冗余的服务器组成。监视数据前置处理系统(SDFP)将接收到的各种监视源信号转换为Airnet空管自动化系统可以识别的内部格式,支持的数据格式种类较多,如ASTERIX、MP2、CD2、Toshiba、MHT4008-2006等格式。系统根据监视数据离线参数的配置,进行不同类型数据的解析。
3.2.2 监视数据质量监控。监视数据前置处理系统(SDFP)对各监视源数据进行实时的质量监控。SDFP监视的数据质量指标有9个。一是数据有无,判断设定时间内有无接收到监视数据。二是帧校验,根据CRC校验来判定系统收到的错误数据包与总数据包的比值,该校验与信号传输链路有关。三是数据延时,根据接收数据的时效性进行判断,如果延迟过大,则数据就失去了有效性。四是扇区连续性,根据正北和扇区等服务信息检查该指标,否则不检查。五是数据精度,检查测试目标相对于其标准位置的偏移值。六是数据必备项有无,对二次点迹数据进行必备数据项信息检查,并对航迹数据进行必备数据项信息检查。七是数据项有效性检验,要计算出现不合法数据项值的目标数与总目标数据之比。八是目标连续性,要计算相邻周期内同一目标不连续出现的次数与总目标之比。九是采用时间窗口滑动工具,对指定时间段内的原始数据质量进行上述指标的统计。
3.2.3 监视数据通道比选。SDFP对于每个监视数据源都可以配置为双通道数据接入,如果两通道均有数据输入,系统默认该监视源采用自动比选通道模式,会不断对两个通道的数据质量监控指标进行比较。
3.2.4 监视数据坐标转换。地心空间直角坐标系统,是目标从雷达本地坐标系统变换到以跑道中心为系统中心点的坐标系统的基础。等距方位投影,是目标坐标和其他空域坐标(机场、终端区、航路等)变换到以跑道中心为系统中心点的坐标的关键。AirNet空管自动化系统的坐标转换算法独立于具体的椭球体参数,如果所有空域信息和地心空间直角坐标采用相同的椭球体参数,则坐标变换是准确的。
3.3 监视数据融合处理
3.3.1 监视数据融合处理概念。监视数据融合处理包含:单监视源区域目标屏蔽,雷达航迹非初始化区域处理,航迹关联、跟踪、融合,目标高度跟踪及高度突变处理,QNH修正,航迹过载处理,紧急状态告警,SPI状态提示,重复二次代码告警等。
3.3.2 单监视源目标屏蔽。单监视源目标屏蔽指定监视源在划定区域内的目标:参数取自filter.cfg地图文件,可在DBM上的作图工具中画出屏蔽区域地图,设置屏蔽高度范围,并指定要屏蔽的监视源ID号。当指定雷达的目标落在该区域的高度范围内时,目标被屏蔽。
3.3.3 单监视源非初始化处理。对于某些质量较差的监视源,可能在某个区域经常出现假目标的情况。为了防止这种情况的出现,系统允许为指定监视源划定区域。当该区域内出现新目标时,直接丢弃不用。但对于区域外进入该区域的目标,要最大程度避免雷达质量不佳带来的干扰。
3.3.4 监视数据融合处理流程。一是航迹关联。满足相关条件的目标关联为同一目标,分配相同的系统航迹号。不同雷达航迹相关条件为:应答机代码相同(无应答机代码的判断24位地址码);距离小于相关距离;高度差小于相关高度;航向差小于相关航向。二是数据融合:对于多雷达目标数据进行加权融合处理,本系统采用动态权重和静态权重相结合的算法来计算融合。三是航迹跟踪:对已融合的系统航迹,需要进行滤波跟踪处理,使目标位置更接近实际位置,防止目标位置突然跳变的情况。
4 结语
本文主要对AirNet空管自动化系统监视数据处理进行了探究,并且详细地介绍了监视数据处理的流程,分析了监视数据前置处理和监视数据融合处理的工作原理。总之,深入学习掌握该系统,对空管行业的技术保障人员来说尤为重要。
参考文献:
[1]成都民航空管科技发展有限公司.AriNet空管自动化系统技术手册[Z].2019.
[2]成都民航空管科技發展有限公司.AriNet空管自动化系统监视数据手册[Z].2019.
[3]李平.空管自动化系统概述[J].科技广场,2011(6):72-74.
