
基于模糊Kano模型的山地苗木移栽机器人设计
2020-05-14 13:48伍健张玲玉吕云隆
工业设计 2020年3期
关键词:产品设计
伍健 张玲玉 吕云隆
关键词:模糊Kano模型;山地苗木移栽机器人;产品设计
随着城市化水平提高,农村劳动力减少和土地集约化,农业机械化的发展不可避免。在《“十三五”国家科技创新规划》中新增智能农业装备技术为我国“十三五”期间科技创新目标。智能农业装备与传统农业装备相比,具有智能化、自动化、安全可靠、多功能通用等诸多优势。山地苗木移栽机器人是一种新型的智能农业装备,主要用于山地丘陵地区的苗木移栽的工作,解决了传统的大型农业装备无法进入山地丘陵地区的问题。在这类新型智能农业装备的设计中,关于机械结构和控制系统等领域有较多的研究。如李晓月等人,对玉米秧苗移栽机的结构进行了设计和优化。张海芸等人,对玉米移栽机的自动送苗装置进行了研究。吴东志,对电子信息技术在农业机械中的应用进行研究。但是对于用户需求的研究较少,智能农业装备作为一种耐用的产品,缺乏人性化的设计会严重影响用户的满意度。因此,探索一种满足用户感性需求,提升用户体验的智能农业装备设计方法是十分有研究价值的。众多学者在用户体验领域,为提升用户满意度,运用各种科学的方法对产品设计进行了研究。耿秀丽等人,使用模糊DEMATEL方法对产品功能需求的相互影响关系进行研究,用于修正产品功能需求的初始重要度。李佳璐等人,采用模糊评价法建立了外骨骼机器人的舒适性综合评估模型,同时运用该模型对设计进行评价,提出设计的修改意见。黄河等人,运用层次分析法确立了以感性词汇为基础的产品可用性多级指标模型,为产品设计与改进提供指导。基于此,文中以山地苗木移栽机器人设计为例,通过Kano模型获取用户需求类型,确定重点设计要素,据此进行方案,从而提出用户满意度高的产品外观设计方案。
1模糊kano模型概述
Kano模型是由日本著名学者狩野纪昭(Noriaki Kano)提出的对用户需求分类和优先排序的工具。以分析用户需求对用户满意的影响为基础,体现产品性能和用户满意之间的非线性关系,善于解决用户体验量化的问题。Kano模型在各行各业都有着广泛地运用。黄光龙等,将kano模型与TRIZ理论结合分析用户需求,并用于产品设计领域。孟庆良等人,将Kano模型应用于物流服务行业,发掘顾客关注的服务属性。Sanjaykumar等人,将Kano模型与QFD进行组合分析,重新定义产品开发的方法。
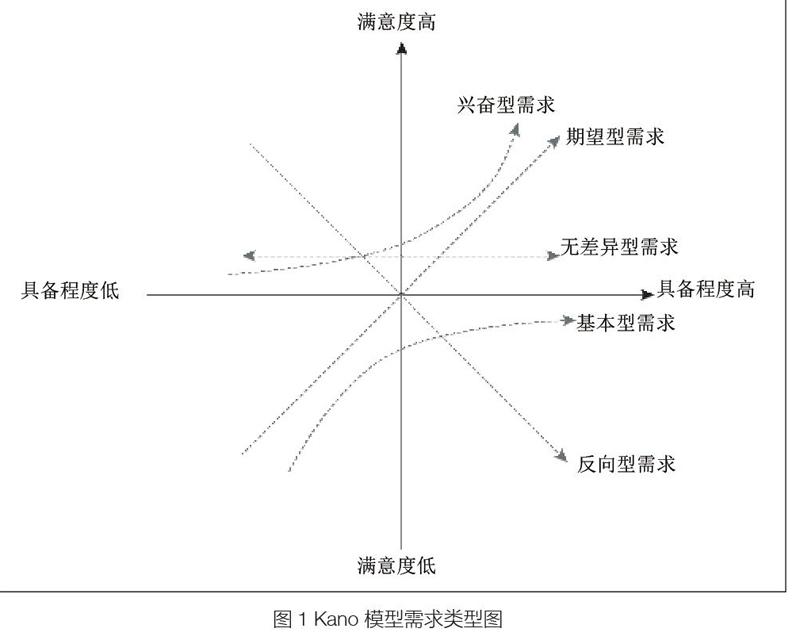
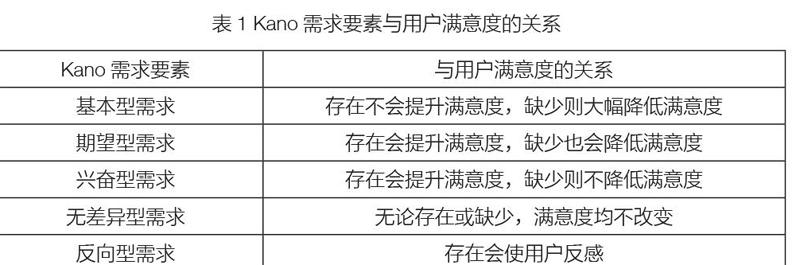
根据产品属性的不同,Kano模型将用户需求分为5类,分别是基本型需求(Must-beQuality),期望型需求(0ne-dimensionalQuality),兴奋型需求(Attractive Quality)、无差异型需求(Indifferent Quality)、反向型需求(Reverse Quality)。各需求要素与用户满意度关系如表1所示。
2基于模糊Kano 模型的山地苗木移栽机器人设计思路
2.1山地苗木移栽机器人的需求获取
山地苗木移栽机器人的需求获取通常采用Kano问卷调查法。随着研究的深入,单一的Kano模型在用户需求分析过程中难以精确地反映用户的需求类型。模糊理论是美国的Zadeh教授提出,主要内容是用区间模糊数(0,0.1,0.2,…1)代替确定值0和1。将模糊理论运用于kano问卷中,将原本的单一选项变成根据感受评分(将总分1按照需求分给不同的满意程度,如满意0.6分,理应如此0.2分,无所谓0.2分),更符合用户的模糊思维习惯,使得调查结果更加接近用户的真实情况。
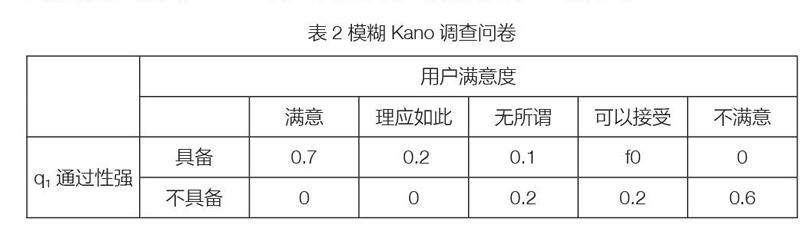
山地苗木移栽机器人属于智能农业装备的范畴,区别于传统的农业机械,在设计中需要考虑更多的要素。针对现有苗木移栽机械的分析,结合智能化产品的用户需求,总结出山地苗木移栽机器人的设计要点,利用q进行编号,对设计要点从正反两个方面设置问卷的问题,并邀请用户打分,这些问题分别是:产品具备该设计要点时用户的满意度和产品不具备该设计要点时用户的满意度。模糊Kano调查问卷调查数据如表2所示。
为了针对统计结果进行有效地分析。采用表3所示Kano问卷分析表对Kano调查问卷中的数据进行统计和对照,其中M表示基本需求,0表示期望型需求,A表示兴奋性需求,I表示无差异型需求,R表示反向需求,Q表示可疑矛盾需求。
通过模糊kano模型问卷所得数据,构建模糊矩阵。以表2为例,设具备需求q1为矩阵x=[0.7 0.2 0.100],不具备需求q1为矩阵Y=[000.20.20.6]。根据表3得出用户需求类型矩阵:
对每一份问卷均使用以上方法计算得出结果,在“qt通过性强”的kano问卷中有205人认为該设计要点是M基本型需求,18人认为是0期望型需求,50人认为是A兴奋型需求,32人认为是I无差异型需求。所以判断,通过性强是基本型需求。同理,所有设计要点的用户数据统计结果如表4所示。
2.2山地苗木移栽机器人的需求分析
根据表4可知,q1通过性强、q2移栽高效、q7智能识别自动避障、q8状态显示、q9安全可靠等设计要素属于基本型需求,在设计中需要重点考虑,不可缺少。由于山地的特殊作业环境,只有通过性强的中小型机器人才能够适应工作环境。机器人的主要工作是移栽苗木,高效地移栽是工作的基础。农业机器人工作的重要前提是能够识别工作对象及位置,所以智能识别自动避障的功能是不可缺少的。山地苗木移栽机器人工作的过程是自动的,清晰的状态显示让用户能及时观察到机器人的工作情况,便于对设备进行检修维护或者排除外部干扰,使山地苗木移栽机器人正常作业。
q3轻量化材料、q5稳定性强、q10装载能力强、q11工作效率高、q12结构简单维修方便等属于期望型需求,在设计中完成度越高则用户满意度越高。山地苗木移栽机器人使用轻量化材料的前提下,可以减少自重,装载更多的苗木作物。复杂的路况和工作环境使得山地苗木移栽机器人在行进过程中会出现颠簸,除了在结构上进行增强稳定性地改进,还需要在造型设计语言上进行表达,体现出产品在整个使用过程中的稳定性。为了灵活应对狭窄的山路,考虑到山地路面的承载能力等因素,山地苗木移栽机器人的体量不能做得很大,在有限的内部空间中,需要合理安基于排动力机构,作业机构和苗木仓的位置。使用机器人的目的是减少人力劳动,高效率是对产品期望,效率越高,用户越满意。用于作业的机器是需要定期修理和维护的,在满足功能需求的前提下能做到结构简单便于维修是能极大提升用户满意度的。
猜你喜欢
包装工程(2022年12期)2022-07-04
汽车实用技术(2022年7期)2022-04-20
中国宝玉石(2020年4期)2020-09-23
中国宝玉石(2020年4期)2020-09-23
中国宝玉石(2020年4期)2020-09-23
中国交通信息化(2019年3期)2019-06-18
电子制作(2018年10期)2018-08-04
艺术评论(2017年9期)2017-10-21
