光伏并网逆变器Simulink建模与教学仿真
2020-05-16 07:52聂晓华刘继君
实验室研究与探索 2020年2期
聂晓华, 刘继君
(南昌大学信息工程学院,南昌330031)
0 引 言
随着新能源产业的不断发展和人们环保意识的增强,以可再生能源为基础的太阳能光伏发电系统得到了广泛应用和推广。光伏并网逆变器作为光伏发电和电网连接的重要纽带,也是学习新能源发电技术中的重要课题[1-3]。
在现有各类文献中,对光伏并网逆变器的讲解多以理论分析为主,同时受试验设备价格和规模的限制,初学者往往很难在学习周期内找到理论与实际运用中的联系[4-6]。Simulink仿真实验平台能很好地将理论与实践相结合,基于Simulink平台搭建了单极式三相光伏并网逆变器仿真模型。以光伏并网逆变器最常用的恒功率控制策略为背景[7],通过单极式三相光伏并网逆变器在同步旋转dq坐标系下的数学模型解释了系统中有功分量和无功分量的耦合问题及解决办法,给出了详细的建模仿真步骤。以仿真结果证明了理论分析的正确性,很好地将理论与实际相结合,能够提高学生的学习热情。
1 光伏并网逆变器的数学模型
单级式三相光伏并网逆变系统结构如图1所示[8]。
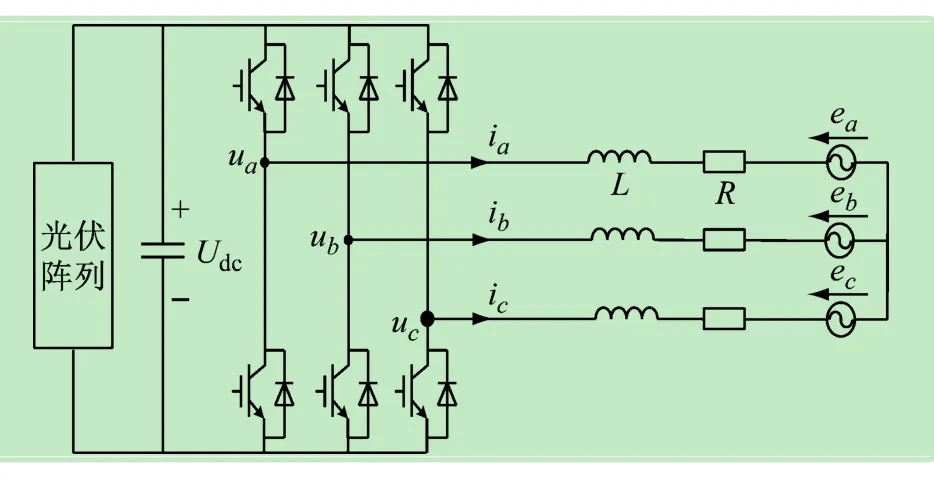
图1 单级式三相光伏并网主电路
假设三相系统对称,并网逆变器在三相静止abc坐标系下的电压方程为:

在三相平衡情况下,系统只有两个自由度,因此可以将三相系统简化为两相系统。将三相静止坐标系下的系统电压方程变换到两相垂直静止αβ坐标系下得:

在式(2)中,系统的变量仍然为交流量。由于典型的比例积分(Proportional Integral,PI)调节器无法实现交流量的无静差控制,因此需要通过坐标变换将静止坐标系中的交流量变成同步旋转dq坐标系中的直流量。变换后的系统电压方程为:

式中,ω为旋转坐标系的同步角速度。在零初始状态下对式(3)进行拉普拉斯变换[9],得三相光伏并网逆变器在两相同步旋转dq坐标系下的传递函数为[10]:

与式(4)对应的模型结构如图2所示。

图2 同步坐标系下系统模型
由图2可见,并网逆变器的数学模型在d、q轴间存在耦合。为实现解耦控制,采用前馈解耦策略,如图3所示,在并网逆变器输出电压中分别引入前馈量+ωLId(s)和-ωLIq(s)。解耦后等效模型结构见图4。

图3 引入前馈解耦的模型结构
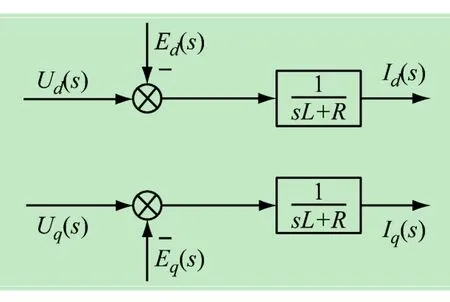
图4 解耦后的等效模型结构
2 恒功率控制仿真模型
恒功率控制是指光伏逆变器在最大功率点跟踪控制的基础上工作于恒定输出有功功率和无功功率的控制模式[11]。本文采用基于电流闭环的矢量控制来实现逆变器恒功率输出,因此首先讨论dq旋转坐标系下功率的表达式。
根据瞬时功率理论,电网侧吸收的瞬时有功功率p和瞬时无功功率q在dq旋转坐标系下的计算式分别为[12-13]:

式中,ed、eq和id、iq的值别为电压电流矢量在两相旋转坐标系中d、q轴上的投影值。根据式(5)可得电流指令计算模块如图5所示。
如图6所示为单极式三相光伏并网逆变器在dq旋转坐标系下恒功率控制系统示意图。和分别为三相光伏并网逆变器输出有功功率和无功功率的给定信号,的取值由光伏阵列实际输出有功决定,的取值由系统需求决定。通过功率参考信号与测得的电网电压实际值计算出参考电流指令。由参考电流指令与实际并网电流指令的误差经过PI调节器获得逆变器输出电压指令,再通过空间矢量脉宽调制(Space Vector Pulse Width Modulation,SVPWM)技术实现逆变器输出电压跟踪电压指令[14]。
建立三相光伏并网逆变器的仿真模型[15],如图7所示,主电路由直流电源、同步脉冲触发器、全控型开关桥、L滤波电路、负载和交流电源等部分组成。
设置系统交流电源有效值为220 V,频率为50 Hz,负载容量为0.1 MW,滤波电感为0.5 mH,开关元件的开关频率为15 kHz。经过计算和调试,当电流调节模块的PI参数Kp和Ki分别取1.15和20能使系统稳定并有较好的跟踪效果。

图5 电流指令计算模块

图6 恒功率控制系统结构示意图

图7 系统仿真模型
3 仿真结果
设置仿真时间为0.5 s,有功功率参考值为1.2 kW,无功功率为0,即系统工作在单位功率因数状态,如图8所示为系统并网电流波形。

图8 并网电流仿真波形
由图8可以看出,并网电流能够以较快的速度达到稳定值,且波形无畸变,说明在旋转坐标系下PI控制能够实现对正弦量的稳定跟踪。
为了比较解耦前和解偶后的控制效果,设置有功功率参考值在0.5 s时由1.2 kW突变为1.5 kW。无功功率参考值始终为0。仿真时间为1 s,解耦前和解耦后的逆变器输出功率曲线分别如图9和图10所示。
由图9、10可见,是否加入解耦量对系统的稳态结果无影响。而在有功功率参考值突变时,解耦前无功功率受有功功率变化的影响比较明显,解耦后无功功率几乎不受有功功率动态变化的影响。这也说明了前馈解耦能够有效消除同步旋转dq坐标系下d轴分量和q轴分量之间的耦合。
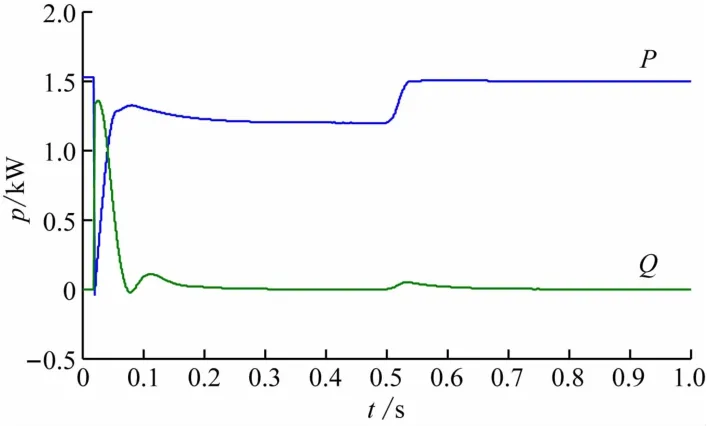
图9 解耦前系统输出功率

图10 解耦后系统输出功率
4 结 论
利用Matlab/Simulink平台搭建了基于恒功率控制策略的光伏并网逆变系统,详细分析了两相同步旋转dq坐标系下有功分量和无功分量之间的耦合关系和前馈解耦的原理。仿真结果表明前馈解耦策略能有效改善系统的耦合情况,与理论分析结果相符。
猜你喜欢
防爆电机(2020年5期)2020-12-14
防爆电机(2020年3期)2020-11-06
哈尔滨铁道科技(2020年4期)2020-07-22
学校教育研究(2020年11期)2020-06-08
当代陕西(2019年19期)2019-11-23
智族GQ(2019年9期)2019-10-28
电子制作(2019年23期)2019-02-23
英美文学研究论丛(2018年1期)2018-08-16
科技传播(2015年20期)2015-03-25
西安航空学院学报(2014年5期)2014-07-13