船舶交流电机PLC 调速系统设计分析
2020-05-18 08:14刘向辰乔世英
舰船科学技术 2020年4期
刘向辰,陈 磊,乔世英
(1.甘肃建筑职业技术学院,甘肃 兰州 730050;2.国家电网甘肃省武威市电力局 电建实业有限公司,甘肃 武威 733000;3.中国航天科技集团航天五院兰州510 研究所,甘肃 兰州 730000)
0 引言
作为新一代的工业控制设备,PLC 在自动化控制与生产过程中具有实用性强、使用方便、可靠性高、抗干扰能力强等诸多优点,将PLC 应用到船舶用交流电机控制系统中也逐渐成为国内外研究的焦点。
在传统锅炉控制过程中,存在资源利用率低、设备运行不可靠等问题,文献[1]基于西门子PLCS7-200[2-3]设计了PLC 模糊控制方法,该方法能在很大程度上减少设备维护人员的工作量。为了提高钻井平台的自动化能力,文献[4]设计一种基于PLC 控制的机械手臂控制系统,通过对系统逻辑、PLC 控制电路进行分析与设计,实现了钻井平台操作简单、运行可靠、定位精度高等诸多要求的智能钻井平台控制系统。
本文在PI 控制的基础上,提出一种基于改进型Fuzzy-PI控制策略的船舶交流电机PLC 调速系统,该方法将引入积分重置环节的Fuzzy-PI 控制策略与PLC 相结合,既能保证电机转速调节的快速性和稳定性,又避免了PI 控制过程中的积分饱和问题;同时,PLC 又具有操作简单、实用性强、扩展性和可靠性高、处理并发能力强等优点。充分发挥两者之间各自的优势,达到船舶交流电机快速、可靠运行的目的。
1 系统设计思路
船舶交流电机控制系统采用的是转速闭环系统,通过霍尔传感器检测到电机的实际转速并反馈至输入端,与输入端的参考给定转速做差后,按照一定的控制规律控制变频器,实现对交流电机转速的控制,交流电机转速调节控制系统原理如图1 所示。
2 改进型Fuzzy-PI 控制策略
根据被控对象的实际变化,通过计算机的模糊推理对PI参数进行实时调节,Fuzzy-PI 控制策略的原理如图2 所示。

图2 Fuzzy-PI 控制原理图
Fuzzy-PI 控制策略首先要设定一组初始PI 参数(即KP0、KI0);接着,建立误差信号e、误差信号变化率ec 与之间的模糊推理关系;最后,对误差信号e、误差信号变化率ec 进行实时观测,并根据相应的模糊规则实现模糊推理,在通过查询模糊规则矩阵来对KP、KI进行实时整定,来满足系统对动态特性的要求。
经过Fuzzy-PI 控制策略整定后的KP、KI可以写成

Fuzzy-PI 控制策略的基础仍然是PI 控制,PI 控制在离散状态下的表达式可以写成

通过分析公式(2)可以看出,PI 控制的输出与0 到m之间的所有采样时刻的状态量均相关,考虑误差的累积之后,积分环节比较容易出现饱和,随着时间的延长,之前的累积效应对系统造成的影响越来越明显,导致电机调速过程中出现超调和震荡。为了消除积分饱和对系统造成的不利影响,本文在Fuzzy-PI 控制策略中加入一个积分重置环节,即系统若检测到参考转速发生变化时,将m 归零,也就是将积分环节从本时刻起重新进行累积计算,有效避免了之前累积量过大给系统造成的不利影响。
3 改进型Fuzzy-PI 控制策略Simulink 分析

图3 曲面分布图
本文所采用的改进型Fuzzy-PI 控制策略应用于速度环,输入量和输出量的计算机语言统一为NB、NM、NS、ZO、PS、PM、PB;归一化论域为 [-3、-2、-1、0、1、2、3]。
当模糊变量、归一化论域、转速误差e 及转速误差的变化率ec 都确定后,搭建控制模型,为了分析改进型Fuzzy-PI控制策略的性能,在Matlab/Simulink 中做出及的曲面图,观察参数及随输入量的变化,比较明显的展现改进型Fuzzy-PI 控制策略的特性,曲面如图3 所示。
通过以上分析,首先可以得到PI 初始参数KP0和KP0,由模糊规则得到KP及KI,最后由公式得到KP和KI。
为了验证改进型Fuzzy-PI 控制策略的动态控制性能,通过采用阶跃输入信号为系统仿真模型激励,改进型Fuzzy-PI控制策略的动态特性如图4 所示。
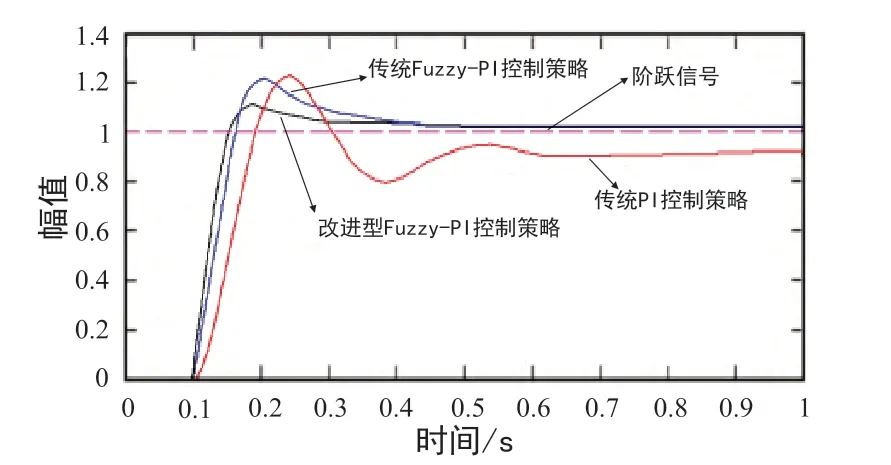
图4 动态特性曲线
可以看出,相比于PI 控制策略和传统Fuzzy-PI 控制策略,改进型Fuzzy-PI 控制策略具有良好的动态特性。
4 仿真分析
为了验证所提方案的正确性,对以上方案进行仿真分析。
控制器选用S7-1500 系列PLC,用于完成逻辑信号的采集、处理、指令的下发以及与外部设备通讯等功能,PLC 通过Profibus-DP 总线用于与外部通讯或下载/上传PLC 程序,人机显示界面选用KTP 600 Basic。
船舶交流电机的额定功率为2.2 kW、额定电压380 V、额定电流5 V、额定转矩15 N·m、额定转速1440 r/min、定子电阻参数为5.5、转子电阻参数为6.5、定子和转子之间的互感为 160 mH。
为了验证改进型控制方案能否改善船舶交流电机的转速动态特性,令参考给定转速为1000 r/min。则电机空载启动仿真波形如图5 所示。
可以看出,当参考给定转速为1000r/min 时,基于PI 控制策略下的船舶交流电机空载启动转速超调17.5%,从启动至稳定运行时的时间为0.15 s;基于改进型Fuzzy-PI 控制策略下的船舶交流电机空载启动转速几乎无超调,从启动至稳定运行时的时间为0.1 s。
由此证明了改进型Fuzzy-PI 控制策略能够改善船舶交流电机的动态响应速度。

图5 船舶交流电机空载启动转速仿真波形
为了验证改进型控制方案能否改善船舶交流电机的运行稳定性,当电机转速稳定运行至1000 r/min 时,交流电机的a相定子电流仿真波形如图6 所示。
可以看出,当船舶交流电机转速稳定运行在参考给定转速1000 r/min 时,基于PI 控制策略下的船舶交流电机的a 相定子电流正弦稳定性较差,谐波畸变率较高;而基于改进型Fuzzy-PI 控制策略下的船舶交流电机的a 相定子电流正弦稳定性明显提升,谐波畸变率也降低。
由此验证了基于改进型Fuzzy-PI 控制策略能够提高船舶交流电机的控制稳定性。
5 结语
由于传统PI 控制策略下的船舶交流电机存在转速动态特性差、控制性能不好的问题,该问题在电机中低速运行过程中更加明显。为了提高电机的转速动态特性,改善控制性能。本文在模糊PI 控制的基础上提出一种基于改进型Fuzzy-PI 控制策略的船舶交流电机PLC 调速系统。

图6 船舶交流电机a 相定子电流仿真波形
通过Matlab/Simulink 算法分析和PLC 仿真,验证了该策略能够提高船舶交流电机的转速动态特性和稳态控制特性,具有响应速度快、稳定性好、无超调量等优点;同时兼备了PLC 操作简单、实用性强、处理并发能力强等优点。
猜你喜欢
时代汽车(2022年19期)2022-10-18
汽车实用技术(2022年15期)2022-08-19
防爆电机(2022年4期)2022-08-17
防爆电机(2022年4期)2022-08-17
防爆电机(2022年3期)2022-06-17
能源工程(2022年2期)2022-05-23
北京航空航天大学学报(2021年9期)2021-11-02
电机与控制学报(2018年9期)2018-05-14
魅力中国(2016年52期)2017-09-01
轻兵器(2017年2期)2017-03-10