
“高分七号”卫星双线阵相机暗电流特性分析及校正
2020-05-21 00:20张斐然董方刘冰洁李阳李春梅董书莉
航天返回与遥感 2020年2期
张斐然 董方 刘冰洁 李阳 李春梅 董书莉
“高分七号”卫星双线阵相机暗电流特性分析及校正
张斐然 董方 刘冰洁 李阳 李春梅 董书莉
(北京空间机电研究所,北京 100094)
暗电流的有效去除能够提高相机动态范围,提高相机在低辐照条件下的成像能力。文章对“高分七号”卫星双线阵相机应用的两款CCD各谱段的暗电流及其噪声特性进行了分析,在此基础上分别选取了不同的暗电流估计方法,给出了校正算法的数学模型,利用FPGA开发工具对校正算法进行了实现,应用中分析了影响校正效果的各种因素。使用标定的暗电流估计系数进行暗电流校正,结果显示两台相机的暗电流均得到去除,选取的估计方法合理有效。
电荷耦合器件 暗电流噪声 特性分析 校正算法“高分七号”卫星
0 引言
CCD凭借其良好的光电转换性能,广泛应用于空间军事侦察、地球资源探测和测绘等领域[1]。在实际应用中,由CCD引起的影响相机成像特性的因素很多,暗电流及其噪声是其中的重要组成部分[2]。暗电流指CCD内部少数载流子受热激发产生的电流,它在无光照条件下也能产生,故称其为暗电流。在CCD的输出图像信息中,暗电流成分是多余且无用的信息,特别在低照度条件下,暗电流占CCD输出信号很大比重时,相机成像品质特别是信噪比会受到较大影响。暗电流的去除不仅能够提高相机信噪比和动态范围,还能够大大提高后续光电响应不一致性校正的精度。目前广泛应用的抑制暗电流的方法有两种[3-4]:1)降低CCD器件的工作温度,据理论计算,CCD工作温度每降低10℃,暗电流大小减半,在实际应用中,这种方法能够达到一定效果;2)利用某些CCD两端提供的少量暗像元,在保证暗像元与有效像元成像条件相同的情况下,将有效像元采样信号与暗像元采样信号相减,达到消除暗电流的目的,两种方法也可结合使用。双线阵相机分系统是“高分七号”(GF-7)卫星的重要有效载荷,对暗电流的校正提出了较高的要求。本文基于图像数据对双线阵相机分系统的前视、后视两台相机在不同阶段和不同试验条件下的暗电流响应特点及暗电流噪声特性进行了统计与分析,前视相机、后视相机全色谱段和后视相机多光谱谱段分属有暗像元、无暗像元和暗像元不能反映实际暗电流三种不同情况,针对这三种情况,采用了两种暗电流估计方法对暗电流进行校正,解决了传统方法校正精度不高及不适用的问题。
1 暗电流的特点
从产生机理看,CCD的暗电流主要来源于三个区域[5]:Si-SiO2分界区域、势阱中的耗尽区以及耗尽区以外的中性区域。在上述三个区域的暗电流中,中性区域暗电流很小,可以忽略不计,耗尽区内产生的暗电流是暗电流噪声的主要来源,而分界区暗电流和耗尽区暗电流都与载流子浓度成正比,于是可以得到CCD暗电流的简化计算公式为[6]

式中D(e)为平均暗电流产生速率;为常数;为工作温度;为玻尔兹曼常数;g为硅带隙能量。由式(1)可见,暗电流的大小主要与温度相关,随着温度的升高或降低,暗电流数值按指数规律增加或减小,因此抑制暗电流的有效措施之一便是对器件进行制冷。
从暗电流噪声分布特点看,CCD的暗电流噪声包含两部分[7]:一部分与平均暗电流水平相关,为暗电流散粒噪声,与光子散粒噪声类似,服从泊松分布;另一部分由于加工工艺的原因,暗电流噪声中存在随像元变化的不一致性噪声,这种不一致性是像元固有的特性,不具有随机性。当平均暗电流较小时,暗电流散粒噪声占主要成份;当暗电流增加时,暗电流不一致性噪声占主要成份。暗电流散粒噪声属于随机噪声,不能完全去除;暗电流不一致性噪声属于固定图形噪声,可以去除。
2 暗电流的测量
GF-7卫星双线阵相机分系统的前视相机采用多片全色CCD器件拼接,后视相机采用多片全色/多光谱五谱段CCD器件拼接,包含一个全色谱段和四个多光谱谱段,均采用TDI工作模式,这两款CCD的暗电流特性略有差别。另外,由于两台相机性能要求不完全一致,相关焦面组件本身在设计上存在一定差异,实际工况也有不同,导致两台相机的暗电流各有特点。成像电路加电工作后CCD温度开始上升,在刚加电时由于起始温度较低,温度上升较快,暗电流平均水平增长较快;随着CCD温度的升高,产热和散热趋于平衡,暗电流平均水平的增长逐渐放缓;待CCD温度不再上升,暗电流平均水平会保持稳定不变。一般在暗电流测试中,电路加电30~45min左右,CCD温度达到稳定状态,通常从成像电路开始加电至加电45min左右,循环采集不同成像参数下的暗电流进行统计[8]。本文用上述方式对GF-7卫星双线阵相机成像电路电子学测试阶段及相机实验室相对辐射定标实验阶段中的暗电流数据进行采集分析。
2.1 平均暗电流测量结果
前视相机、后视相机全色谱段、后视相机多光谱谱段在成像电路电子学测试阶段及相对辐射定标阶段的平均暗电流测量参数均设置为:增益6dB,量化位数14 bit。图1~3分别为前视相机、后视相机全色谱段、后视相机多光谱谱段的平均暗电流测量结果。图1~3中曲线为CCD完全遮光并分别工作在小TDI级数和大TDI级数情况下,单片CCD所有像元45min内的平均暗电流变化,不同颜色的曲线代表等时间间隔所采集的平均暗电流水平,这些曲线的值也反映了CCD温度的变化。
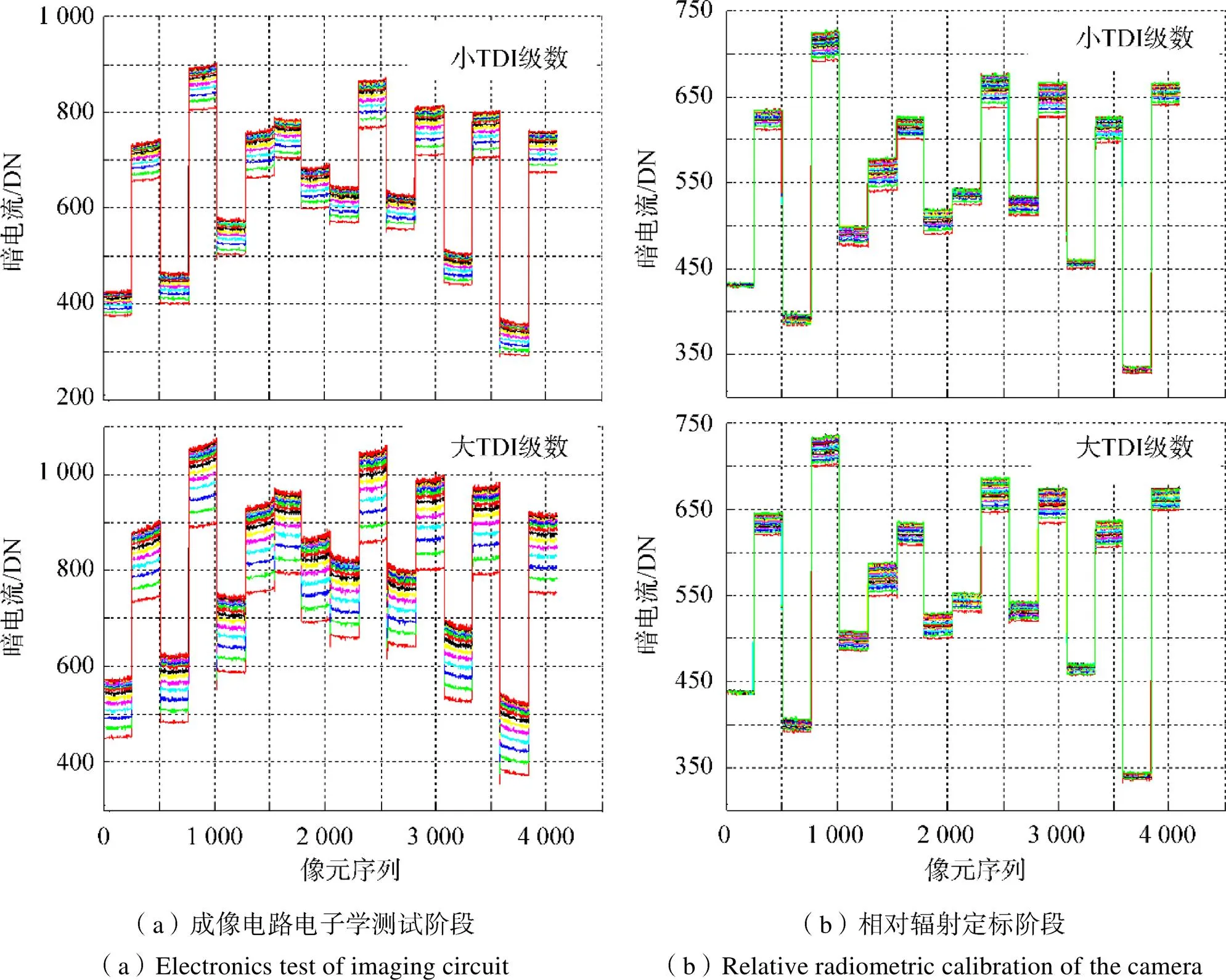
图1 前视相机各阶段各像元平均暗电流变化
成像电路电子学测试阶段仅对CCD器件及焦面电路进行简单散热。从图1(a)中可以看出平均暗电流曲线分布下疏上密,这说明在实验室简单散热条件下平均暗电流水平的增长呈现先快后慢的趋势;另外,图1中的“台阶”是不同抽头的通道不一致性造成的,从中也可以看出各抽头本身的平均暗电流水平有很大差异,但涨幅基本一致,这说明CCD器件各部位的温度是均匀的;对于不同TDI级数下的平均暗电流,随级数变化的部分仅占1/4左右,不随级数变化的部分主要来自于该款CCD器件的隔离行。相对辐射定标阶段相机整体状态与设计在轨状态一致,焦面及相关部组件均有良好的控温措施。从图1(b)可以看出,平均暗电流水平增长速度较慢也较为均匀,但不同抽头之间涨幅出现差异,这说明在该测试阶段控温条件下,CCD器件各部位的温度是有差异的。
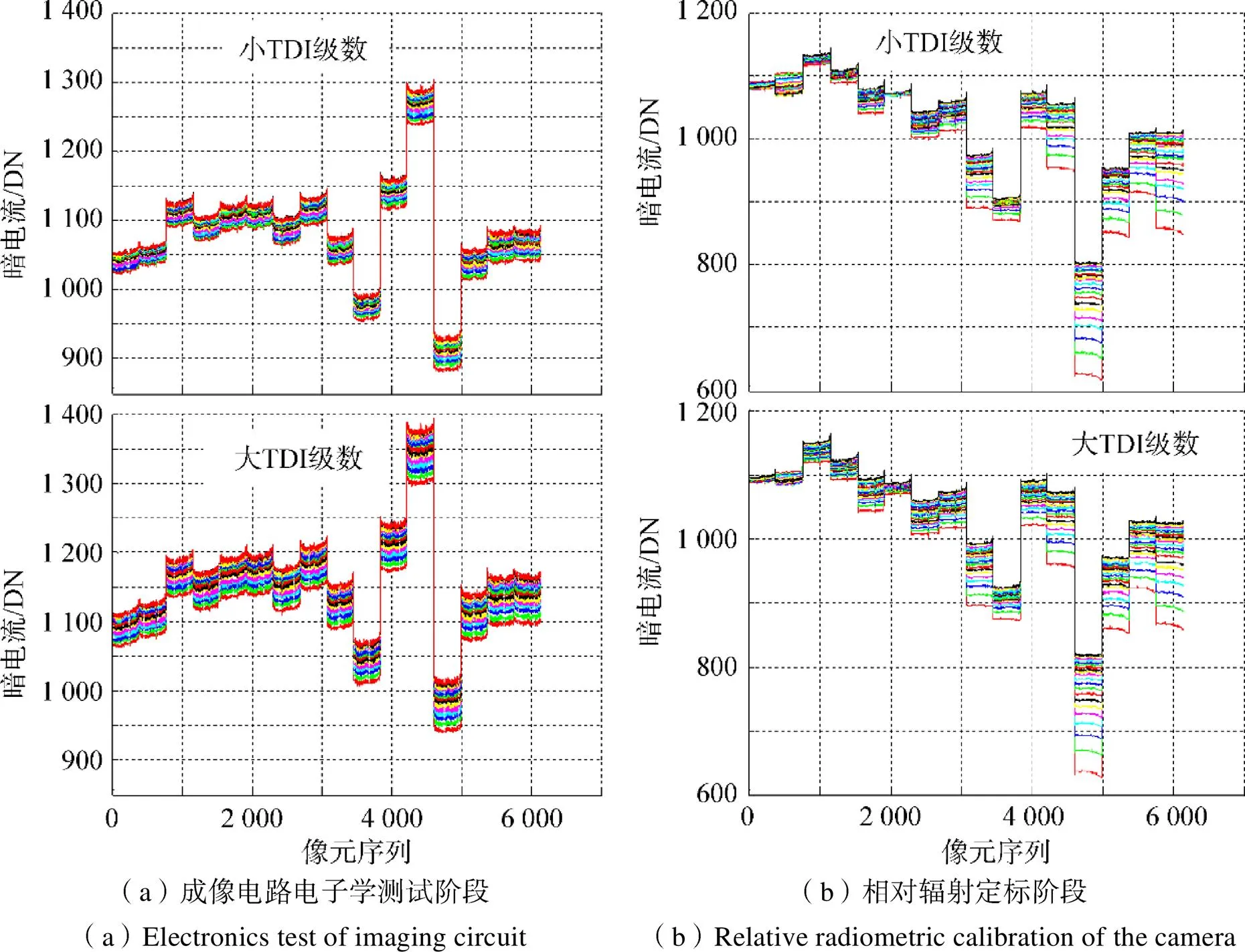
图2 后视相机全色谱段各阶段像元平均暗电流变化
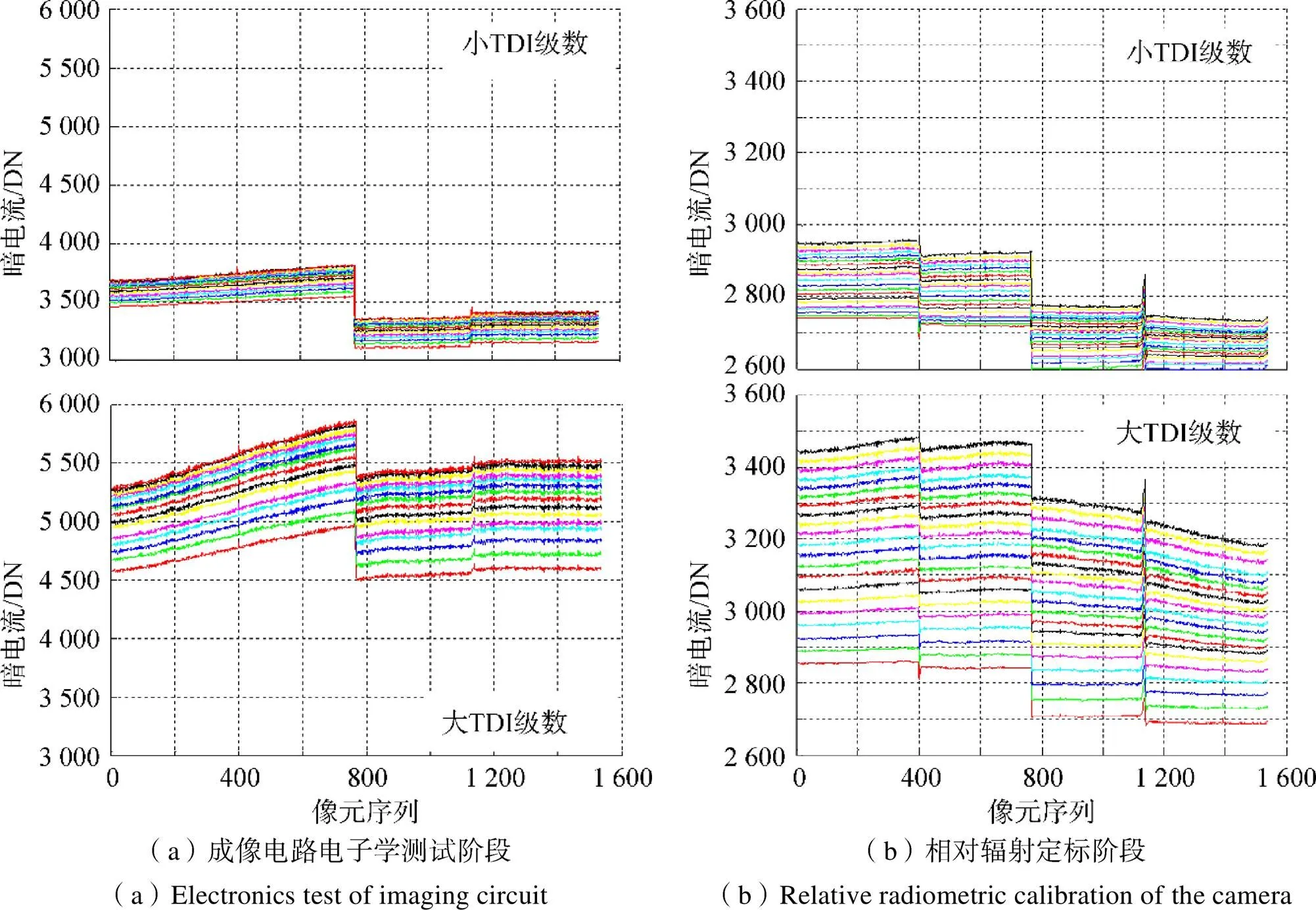
图3 后视相机多光谱谱段各阶段像元平均暗电流变化
与前视相机类似,后视相机全色谱段在成像电路电子学测试阶段平均暗电流水平增加较快。后视相机全色谱段与前视相机所应用的CCD具有相同的像元尺寸,但由于后视相机焦面电路功耗大,导致后视相机温度更高,平均暗电流水平也更高。但从图2(b)中可以看出,在相对辐射定标阶段,该片CCD器件在45min工作时间内一侧暗电流增长速度明显快于另一侧,从而可以反推出CCD工作时,其两端温度状态并不一致,一方面是由于器件两端本身散热情况不同,另一方面有可能受热控实施影响。
与图2相比,图3中可以看出后视相机多光谱谱段平均暗电流水平明显大于全色谱段,这是由于多光谱谱段的像元尺寸比全色谱段更大。同样,由于后视相机焦面功耗大,后视相机多光谱谱段在两个阶段的平均暗电流水平增长都比较快。
图4为前视相机、后视相机全色谱段、后视相机多光谱谱段在成像电路电子学测试阶段及相对辐射定标阶段,相同时间内小TDI级数和大TDI级数对应的单片CCD图像均值变化。

图4 前、后视相机各阶段暗电流均值变化
从图像均值变化能够更直观看出暗电流平均水平整体情况。分别对比图4中各阶段暗电流均值的变化趋势,可以看出:在成像电路电子学测试阶段,由于没有有效的控温措施,暗电流平均水平增加明显更快,并且在暗电流基本稳定后,暗电流大小分别占输出满量程的5%、7%、34%,这很大程度上降低了相机的动态范围;相对辐射定标阶段相机整体与星上状态一致,焦面及相关部组件均有良好的控温措施,暗电流水平明显偏低,暗电流大小分别占输出满量程的3%、6%、20%,说明对器件的冷却在一定程度上去除了部分暗电流噪声。
2.2 暗电流噪声测量结果
对于单一像元,其自身暗电流在同一条件下不同时刻的差异为暗电流散粒噪声的结果,因此计算同一像元不同时刻暗电流的标准差,得到的即为暗电流散粒噪声。而暗电流不一致噪声表现为按空间分布的不同像元的差异,计算不一致性噪声需要先在时间域对每个像元足够多的样本进行平均,去除散粒噪声的影响,再计算像元序列的标准差,得到的结果即为暗电流不一致性噪声[9-10]。两台相机不同谱段在各阶段的暗电流噪声情况如图5所示。

图5 前、后视相机各谱段暗电流噪声变化
由图5中的计算结果可知,随着工作时间的推移,在电子学测试阶段,暗电流散粒噪声和暗电流不一致性噪声都有一定增长,而在相对辐射定标阶段,两种噪声均基本保持稳定,由于暗电流大小反映CCD的工作温度,图中所示结果间接说明两种噪声均会随着温度的升高而增大;另外,对比两种噪声的大小可知,暗电流噪声的主要成分是散粒噪声。
3 暗电流的校正
3.1 暗电流的估计
暗电流噪声直流分量最简单的去除方法是通过在CCD像元阵列的起始处设置少量暗像元,对其输出信号采样存储,并与后续有效像元的输出信号采样值相减的方法去除。但如果想要进行更加准确的校正,需要对每个像元分别进行暗电流估计,得到每个像元的暗电流与平均暗电流的关系。每个像元实际的暗电流与平均暗电流满足一次线性关系[11],可以描述为:

针对双线阵相机不同CCD以及不同谱段的器件特点,在进行暗电流估计时,采用了两种不同的方法:

3.2 暗电流校正
在获得暗电流估计值后,将其从有效像元输出值中去掉即可实现暗电流的校正。实际应用中,需要考虑相机在不同成像参数下工作的具体情况进行校正[14]。当成像电路工作在不同积分时间,由于CCD工作在线性区,实际的暗电流与积分时间具有良好的线性关系[15],式(2)可以适用于不同的积分时间;当成像电路工作在不同TDI级数,实际曝光的是CCD像元阵列中的不同像元,它们具有不同的暗电流不一致性[16],因此针对不同TDI级数需要分别标定不同的暗电流估计系数k和b;当成像电路工作在不同增益,基于AD转换电路工作原理[17],在式(2)中引用修正因子,该修正因子与AD转换芯片增益相关,式(2)修正为
因此,暗电流可以按式(4)予以消除,

式中s和y分别为第个像元校正前和校正后的输出。
由式(4)可知,在暗电流校正算法实施的过程中,会对所有图像数据减去暗电流,这就使得校正后的图像数据无法达到AD的满量程,需要对校正后的图像数据进行灰度拉伸,将式(4)校正后的输出再乘以一个数字增益系数d,得到最终的暗电流校正公式为

式中为AD转换芯片的位数。
3.3 校正结果分析
利用FPGA实现暗电流校正时,受到硬件有限字长的影响,会不可避免地引入量化误差和舍入误差[18],从而影响到整个系统的信噪比,为了降低计算误差对图像信噪比的影响,各个数据的精度必需满足给定的要求。另一方面,为了节约资源,暗电流校正的相关参数根据实际需求使用了不同的整数位长及小数位长[19]。
以前视相机全色谱段为例,校正前CCD的一个通道所有像元的暗电流平均响应如图6所示。图6中不同颜色曲线代表成像电路加电后等时间间隔(3min)采集的平均暗电流,平均暗电流随时间的变化可以视为不同温度下平均暗电流的变化。
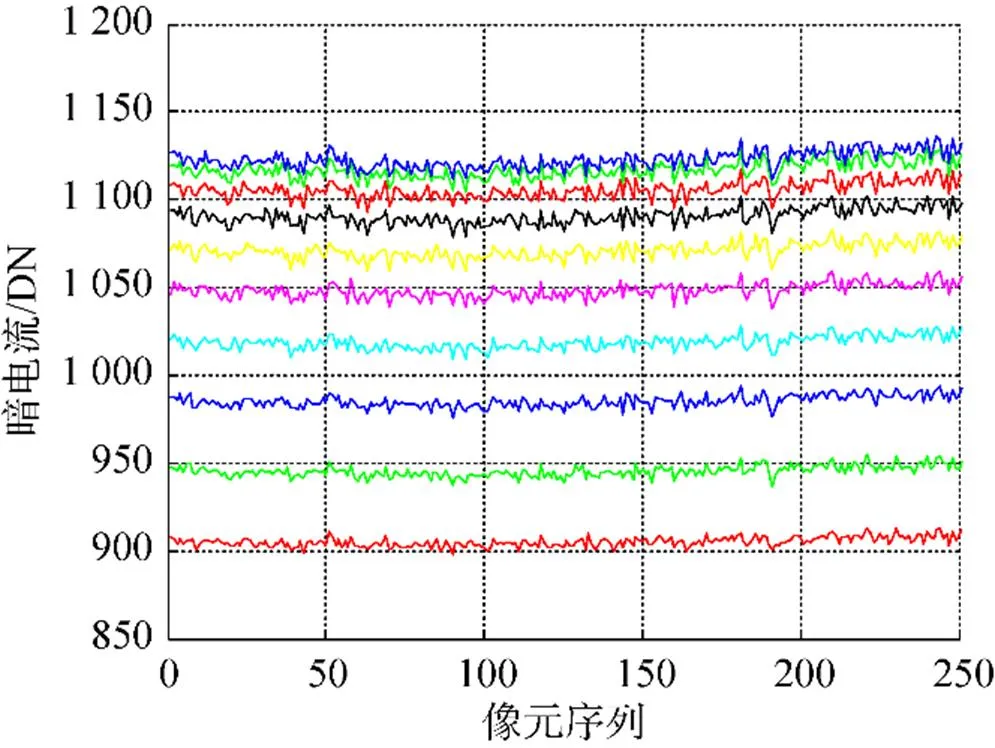
图6 校正前暗电流平均响应
表2 各时间间隔暗像元输出均值及该抽头各像元平均暗电流均值

Tab.2 The output mean value of the dark pixel and the average dark current mean of pixel at each time interval
表3 基于两种方法进行暗电流估计所标定的前10个像元的暗电流估计系数

Tab.3 The dark current estimation coefficients of the first 10 calibrated pixels based on two methods

图7 基于两种暗电流估计方法的暗电流估计情况
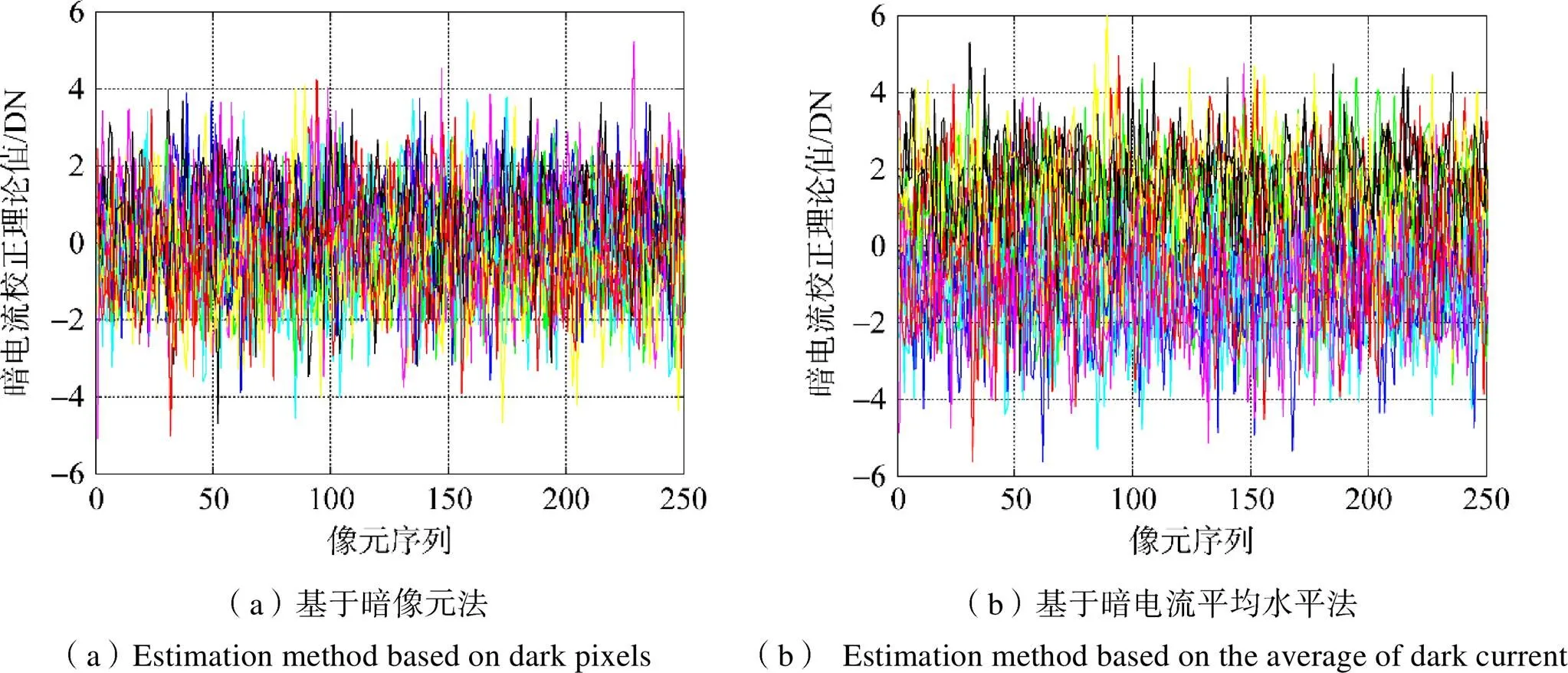
图8 基于两种暗电流估计方法的暗电流校正理论结果
图8中可以看出两种方法均获得了较好的理论校正结果,这说明在同一温度下,无论是基于暗像元还是基于暗电流平均水平,都能够准确地估计暗电流的大小,从而对暗电流进行去除。表4给出了校正前后相关数据的对比。由于暗电流散粒噪声的存在及无法去除,无论使用哪种暗电流估计方法获得的暗电流估计值,依然与暗电流的实际值有一定差值,该差值均值为0,按像元随机分布,各像元的暗电流理论校正结果有正有负,之所以称其为理论校正结果,是因为在硬件中小于0的部分无法输出[20],在图像数据中,这部分像元实际校正值为0。在应用中对暗电流校正算法中暗电流估计系数进行标定时,会按照相关技术文件对估计系数b进行相应处理,使得所有像元的暗电流校正结果均为正数,具体做法本文中不做详细介绍。
表4 同一温度下校正前后数据的对比
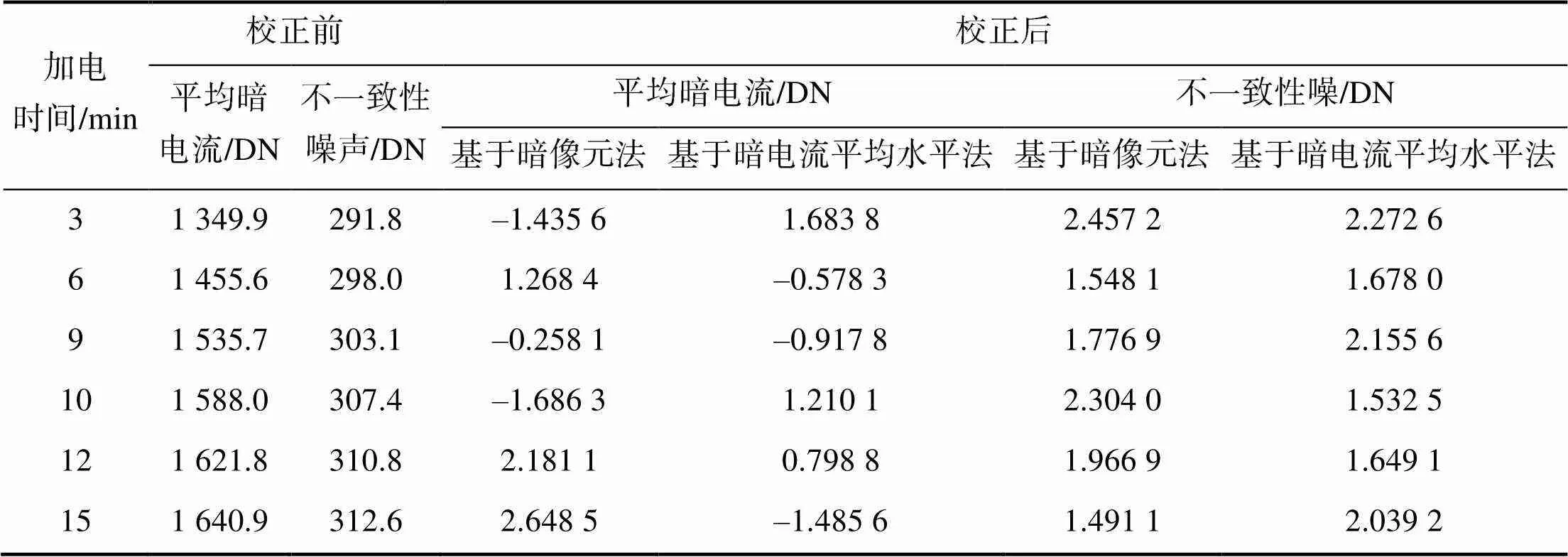
Tab.4 Comparison of data before and after correction at the same temperature
试验表明,基于两种暗电流估计方法进行的暗电流校正均能得到较高精度的校正结果。但这需要良好的温度稳定性,要求CCD在标定暗电流估计系数时和实际工作时处在完全一致的温度条件下,但实际工程中往往很难保证。由于温度对暗像元和对有效像元影响基本一致,若无法精确控温,基于暗像元的暗电流估计方法受到的影响相对较小,在CCD具有暗像元的条件下优先使用此方法。并且,为保证校正精度,在标定系数时,通常采集更大范围温度变化的图像,使得实际在轨工作温度的变化范围尽可能包络在此时采集的样本图像温度变化范围内。但对于没有暗像元或暗像元不能真实反映有效像元暗电流变化情况的CCD,只能采用基于暗电流平均值的暗电流估计方法。标定系数时,如果CCD工作温度与其实际在轨工作时的温度相差较大,会使得暗电流的估计值与暗电流实际值相差较大,影响暗电流的校正效果。因此,若采用基于暗电流平均水平的暗电流估计方法,在进行系数标定时,应尽量保证温控条件满足相机使用要求,并以低温采集的图像数据为主要样本,结合温度升高时暗电流的变化情况对系数进行标定[21-22],并需在不同温度条件下对校正效果进行充分验证。
4 结束语
由于CCD图像信息中包含暗电流信息和光电响应信息,经验表明温度引起的CCD光电响应不一致变化不大,但如果忽略温度造成的暗电流变化(包括暗电流均值变化和暗电流不一致性变化)影响,对暗电流的去除不够准确,后续进行光电响应不一致校正也难以获得更高精度[12]。本文主要对GF-7卫星双线阵相机分系统暗电流及噪声特性进行了分析,根据CCD器件的特点和测试结果分别采取两种方式对暗电流进行了估计与校正,结果表明校正效果较好,不仅使相机在低照度下的成像品质得到改善,也使得后续光电响应不一致性校正获得了较高的精度。GF-7卫星双线阵相机中的校正算法也可以广泛应用于其它成像设备中,具有易实现、精度高等优点,能够有效消除暗电流噪声引起的图像退化,提高成像系统的性能。
[1] 陈世平. 空间相机设计与试验[M]. 北京: 宇航出版社, 2003. CHEN Shiping. Design and Experiment of Space Camera[M]. Beijing: Aerospace Press, 2003. (in Chinese)
[2] 刘则洵, 万志, 李宪圣, 等. 时间延迟积分CCD空间相机信噪比的影响因素[J]. 光学精密工程, 2015, 23(7): 1829-1837. LIU Zexun, WAN Zhi, LI Xiansheng, et al. Influence Factors on SNR of TDICCD Space Camera[J]. Optics and Precision Engineering, 2015, 23(7): 1829-1837. (in Chinese)
[3] 许秀贞, 李自田, 薛利军. CCD噪声分析及处理技术[J]. 红外与激光工程, 2004(4): 343-346. XU Xiuzhen, LI Zitian, XUE Lijun. CCD Noise Analysis and Processing Technology[J]. Infrared and Laser Engineering, 2004(4): 343-346. (in Chinese)
[4] 杨博雄, 胡新和, 傅辉清, 等. CCD工作信号的噪声分析与处理[J]. 光学与光电技术, 2004(4): 51-53. YANG Boxiong, HU Xinhe, FU Huiqing, et al. Noise Analysis and Processing of CCD Signal[J]. Optics and Optoelectronics Technology, 2004 (4): 51-53. (in Chinese)
[5] 程芸, 李涛. CCD遥感相机信号处理电路降噪方法[J]. 航天返回与遥感, 2008, 29(4): 36-41. CHENG Yun, LI Tao. Signal Processing Circuit Denoising Method for CCD Remote Sensing Camera[J]. Spacecraft Recovery & Remote Sensing, 2008, 29(4): 36-41. (in Chinese)
[6] 蔡文贵. CCD技术及应用[M]. 北京: 电子工业出版社, 1992. CAI Wengui. CCD Technology and Application[M]. Beijing: Electronic Industry Press, 1992. (in Chinese)
[7] 梁楠, 张斐然, 蔡帅, 等. 电荷累加型TDICMOS探测器测试方法研究[J]. 光电工程, 2019, 46(8): 31-37. LIANG Nan, ZHANG Feiran, CAI Shuai, et al. Research on the Test Methods of Charge Accumulating TDICMOS Detector[J]. Photoelectricity Engineering, 2019, 46(8): 31-37. (in Chinese)
[8] YU H, QIAN X Y, CHEN S S, et al. A Time-delay-integration CMOS Image Sensor with Pipelined Charge Transfer Architecture[C]//IEEE International Symposium on Circuits and Systems (ISCAS), May 20-23, 2012, Seoul, South Korea.
[9] 于长伟. 低功耗数字域CMOS-TDI图像传感器读出电路研究[D]. 天津: 天津大学, 2016: 8-20. YU Changwei. The Study of Low Power Digital-domain CMOS-TDI Image Sensor Readout Circuit[D]. Tianjin: Tianjin University, 2016: 8-20. (in Chinese)
[10] 刘则洵, 全先荣, 任建伟, 等. CCD相机输出非均匀性线性校正系数的定标[J]. 红外与激光工程, 2012(8): 2211-2215. LIU Zexun, QUAN Xianrong, REN Jianwei, et al. Calibration of Linear Correction Coefficient of Output Non-uniformity of CCD Camera[J]. Infrared and Laser Engineering, 2012(8): 2211-2215. (in Chinese)
[11] 刘亚侠, 阮锦, 郝志航. 线阵TDICCD遥感相机非均匀性校正的研究[J]. 光学技术, 2003(6): 749-751. LIU Yaxia, RUAN Jin, HAO Zhihang. Research on Non-uniformity Correction of Linear Array TDICCD Remote Sensing Camera[J]. Optical Technology, 2003(6): 749-751. (in Chinese)
[12] LI Tao, HE Mingyi, LEI Ning. TDICCD Non-uniformity Correction Algorithm[C]//2009 4th IEEE Conference on Industrial Electronics and Applications, May 25-27, 2009, Xi'an, IEEE, 2009: 1483-1487.
[13] 雷宁, 刘苗, 李涛. TDI CCD像元响应不一致性校正算法[J]. 光学技术, 2010(1): 134-139. LEI Ning, LIU Miao, LI Tao. Algorithm for Correcting Inconsistencies of TDI CCD Pixel Response[J]. Optical Technology, 2010(1): 134-139. (in Chinese)
[14] 董龙, 李涛. 线阵CCD成像仿真研究[J]. 航天返回与遥感, 2008, 29(1): 43-49. DONG Long, LI Tao. Research of Line CCD Imaging Simulation[J]. Spacecraft Recovery & Remote Sensing, 2008, 29(1): 43-49. (in Chinese)
[15] 董龙, 李涛. CCD成像模型及仿真系统研究[J]. 系统仿真学报, 2009, 21(14): 4520-4523. DONG Long, LI Tao. Research of CCD Imaging Model and Simulation System Based on Matlab/Simulink[J]. Journal of System Simulation, 2009, 21(14): 4520-4523. (in Chinese)
[16] AD9942 Data Sheet, Analog Device[EB/OL]. (2019-09-01) [2020-03-21]. https://pdf1.alldatasheetcn.com/datasheet-pdf/view/ 166994/AD/AD9942.html.
[17] 李丙玉. 航天相机FPGA软件开发技术研究[D]. 北京: 中国科学院研究生院, 2011. LI Bingyu. Research on FPGA Software Development Technology for Aerospace Camera[D]. Beijing: Graduate School of Chinese Academy of Sciences, 2011. (in Chinese)
[18] Xilinx, Inc. System Generator for DSP Reference Guide[EB/OL]. (2019-09-01). [2020-03-21]. http://www.xilinx.com/
[19] 董龙, 梁楠. CCD连续转移技术研究[J]. 航天返回与遥感, 2015, 36(3): 33-39. DONG Long, LIANG Nan. Research on CCD Continuous Transfer Technology[J]. Spacecraft Recovery & Remote Sensing, 2015, 36(3): 33-39. (in Chinese)
[20] ZHANG L, LI S J, JIN G, et al, Modeling of Satellite Borne TDICCD Pitching Imaging Image Motion Velocity Vector[C]// IEEE International Conference on Automation and Logistics, August 2009, Shenyang, China.
[21] 曹平, 章文毅, 马广彬. 遥感卫星成像模型研究及仿真[J]. 遥感信息, 2014, 29(3): 62-66. CAO Ping, ZHANG Wenyi, MA Guangbin. Research and Simulation of Remote Sensing Satellite Imaging Model[J]. Remote Sensing Information, 2014, 29(3): 62-66. (in Chinese)
[22] 张保贵, 张宇烽. 空间CCD相机辐射校正算法分析[J]. 航天返回与遥感, 2014, 35(1): 91-96. ZHANG Baogui, ZHANG Yufeng. Radiometric Correction Algorithm Analysis of Space CCD Camera[J]. Spacecraft Recovery & Remote Sensing, 2014, 35(1): 91-96. (in Chinese)
[23] 曲利新. 提高遥感相机电子学成像质量方法[J]. 现代电子技术, 2012, 35(23): 172-174. QU Lixin. Methods to Improve the Quality of Electronic Imaging in Remote Sensing Cameras[J]. Modern Electronic Technology, 2012, 35(23): 172-174. (in Chinese)
[24] 江孝国, 祁双喜, 王婉丽, 等. 光纤耦合CCD相机的平场校正方法研究[J]. 光子学报, 2004, 33(10): 1239-1242. JIANG Xiaoguo, QI Shuangxi, WANG Wanli, et al. Research on the Method of Flat Field Correction for Optical Fiber Coupled CCD Camera[J]. Acta Photonica Sinica, 2004, 33(10): 1239-1242. (in Chinese)
[25] JANESICK J R, ELLIOTT T, COLLINS S. Scientific Charge-Coupled Devices[M]. Bellingham, WA: SPIE, 2001.
Analysis and Correction of Dark Current for the Dual Line Array Camera of GF-7 Satellite
ZHANG Feiran DONG Fang LIU Bingjie LI Yang LI Chunmei DONG Shuli
(Beijing Institute of Space Mechanics & Electricity, Beijing 100094, China)
Dark current is an important and elementary part in CCD output signal, which affects imaging characteristics obviously. Removal of dark current raises dynamic range of the camera and improves the imaging capability in lower irradiation conditions. Firstly, a correction algorithm is given after analyzing the characteristic of CCD dark current and its noise of the high resolution stereo mapping camera of GF-7 satellite. Then, the hardware module of the correction algorithm is developed using a FPGA design tool. Finally, the proposed correction algorithm is tested in hardware circuit and the factors affecting the result of correction are described. The experimental result shows that both the dark current noise of two cameras are removed remarkablyby dark current estimation coefficients calculated during the relative radiometric calibration, which improves the validity of the estimation methods.
charge coupled devices; dark current noise;characteristic analysis; correction algorithm; GF-7 satellite
TP751
A
1009-8518(2020)02-0096-12
10.3969/j.issn.1009-8518.2020.02.011
张斐然,女,1988年生,毕业于哈尔滨工业大学光学工程专业,高级工程师。研究方向为遥感图像处理与应用。E-mail:8298813@qq.com。
2020-02-27
国家重大科技专项工程
张斐然, 董方, 刘冰洁, 等. “高分七号”卫星双线阵相机暗电流特性分析及校正[J]. 航天返回与遥感, 2020, 41(2): 96-107.
ZHANG Feiran, DONG Fang, LIU Bingjie, et al. Analysis and Correction of Dark Current for the Dual Line Array Camera of GF-7 Satellite[J]. Spacecraft Recovery & Remote Sensing, 2020, 41(2): 96-107. (in Chinese)
(编辑:夏淑密)
猜你喜欢
初中生学习指导·中考版(2022年4期)2022-05-12
电子乐园·上旬刊(2022年5期)2022-04-09
人民长江(2021年9期)2021-10-18
舰船科学技术(2021年12期)2021-03-29
航天返回与遥感(2021年1期)2021-03-16
高考·中(2020年2期)2020-09-10
劳动保护(2019年3期)2019-05-16
理科考试研究·初中(2017年4期)2017-11-04
佛山陶瓷(2017年8期)2017-09-06
饮食科学(2016年7期)2016-07-27
