
带有时间约束的再入滑翔轨迹设计
2020-05-21 13:28韩嘉俊王小虎张后军
宇航学报 2020年4期
韩嘉俊, 王小虎, 郝 昀, 张后军
(1. 北京机电工程总体设计部,北京 100854; 2. 中国航天科工集团有限公司第二研究院,北京 100854; 3. 北京控制与电子技术研究所,北京 100038)
0 引 言
近年来,对临近空间飞行器的研究投入的资源越来越多,而其中滑翔式飞行器作为其中的代表更是受到了广泛的关注。其具有飞行距离远、速度快、机动能力强等特点,诸多优点使得该类飞行器执行特定飞行任务成为了可能。时至今日,针对特定任务的飞行约束越来越多,诸如为满足探测需求,必要的地理约束则须被考虑在内。在此方面,各国学者已经开展了大量学术研究,如文献[1]中提出了在复杂约束条件下,一种带有禁飞区约束的再入滑翔轨迹在线快速规划算法。
然而,现阶段单飞行器的任务能力提高已进入瓶颈期。所以,多飞行器协同问题已成为国内外研究的热点,而作为其中的关键研究方向,带有时间约束的轨迹设计受到了国内外学者的重点关注。而在此类问题的研究中,剩余飞行时间的估计成为了研究的关键。一方面,一些学者着重于设计对时间估计误差不敏感的制导律,如文献[2]。而在文献[3]在研究具有落角约束的末制导律过程中,重点分析了剩余飞行时间估计误差对制导精度的影响。另一方面,现阶段时间估计方法大都采用剩余航程与近似飞行速度比值进行估计,而不同的导引方法对以上二者均有较大影响,因此部分学者针对不同制导律研究了剩余时间的高精度估计方法。文献[4]针对传统的比例导引法(Proportional navigation guidance, PNG)提出了一种剩余飞行时间估计方法,根据该导引方法特性,在导引末段,轨迹近似于直线,估计较为准确,并且对初始航向角偏差为0的条件下,针对最优制导律推导了其一般剩余时间估计方法。文献[5]在此基础上,进一步对PNG方法进行了改进,提出了一种带有剩余时间估计并结合IACG(Impact angle constrained guidance)的制导方法——ITACG,同时考虑了飞行时间与落角约束。更进一步地,文献[6]中提出了弹目视线平均速度法估计剩余飞行时间。上述方法均为末制导剩余时间估计方法设计,此段飞行距离、时间较短,可以将研究对象视为匀速运动或者加速度恒定。而对滑翔飞行器的再入过程,其非线性特性较强,上述方法均难以直接应用。因此,部分学者采用了滑模控制方法解决此类问题,如文献[7]中,将该类问题转化为设计给定时间的飞行轨迹控制器来解决。相似地,文献[8]中,设计了满足落角和飞行时间约束的末制导方法,文献[8]是基于传统终端滑模的滑模导引律只保证有限时间收敛。然而,在大多数实际制导应用中,在均匀有限时间内快速收敛到所需的落角是非常重要的。也就是说,闭环收敛时间可以通过制导参数先验估计。文献[9]设计了一种新的自适应快速固定时间滑模导引律,该导引律可以从任意初始航向角以理想的冲击角截获机动目标,并解决了系统抖振问题。在采用滑模控制方法解决飞行时间约束方面,文献[10]设计了一种时变滑模面,针对静止或机动幅度较小的目标,做了拦截效果分析。文献[11]中讨论了脱靶情况下距离未知或丢失时,利用导引头测得的角度和角速度信息预测剩余飞行时间以及其它参数。以上方法,均为针对末制导段的导引方法设计,其均假设飞行器速度或者加速度恒定,并且末制导段飞行距离较短,都为飞行时间的估计带来了方便。对于飞行环境更为复杂,飞行距离更长,飞行速度变化剧烈的滑翔段开展的研究较少,而滑翔段轨迹对于特定飞行任务完成起到至关重要的作用。
文献[12]提出一种弹道参数的解析估算方法,该方法从能量的角度出发,利用准平衡滑翔条件建立滑翔射程和飞行时间的解析估算公式;在此基础上定量地分析研究升阻比、初始速度等弹道参数对滑翔射程和时间的影响规律;同时在理论上分析了最小能量椭圆弹道的射程和飞行时间特性。文献[13]采用将升力系数分解的思路获得了滑翔段高度及射程、弹道偏角、经度、纬度和速度的解析解。为实现在线快速进行弹道规划奠定了基础。
文献[14]设计了一种非线性飞行控制和非线性状态观测器,将飞行时间控制问题转化为非线性最优控制问题,通过摄动过程近似求解相关的哈密顿—雅可比贝尔曼方程,设计了一个闭式最优控制律。进而提出了一种基于虚拟目标的多飞行器协同攻击制导方法。但其研究模型为带有推进动力,速度可控的飞行器,其控制方法具有一定的局限性。文献[15]提出了一种基于态势评估的多飞行器协同攻击多目标任务决策方法,研究了基于D-S证据理论的态势评估数学模型和基于博弈论的任务决策数学模型,但是并未提出具体导引方法。
在轨迹协同设计方面,文献[16]复杂动态环境下匀速率多无人飞行器的动态障碍规避问题,针对此类问题的不等式约束引入松弛变量并结合滑模变结构控制方法设计松弛变量动力学实现对一个或多个或同时多个动态障碍的安全规避。文献[17]设计了一种分布式一体化协同制导与控制律,保证从弹在位置和速度上协同一致地趋近于期望空间构型并使得从弹有和领弹近乎相同的攻击角度。文献[18]针对吸气式高超声速飞行器突防问题,提出了以终端横纵向位置偏差最大和控制能量最小为性能指标,基于优化模型预测静态规划算法。在满足控制输入饱和限制情况下得出了飞行器的突防轨迹,通过对控制输入和期望终端状态偏差权重矩阵的自适应调整,保证了飞行器控制输入饱和限制情况下的收敛速度,有效增强了不同初始设置和约束情况下的收敛鲁棒性。
基于上述考虑,本文开展了带有时间约束的滑翔轨迹设计研究。首先,将再入模型合理简化并对再入轨迹进行分段。而后,推导了剩余飞行时间与剩余航程的解析估算式,采用预测校正的思想,在滑翔段确定倾侧角翻转时机与幅值大小。通过时间调整段与能量管理段配合满足滑翔段飞行时间约束与交班点状态要求。最后,通过数学仿真校验了本文算法的有效性与鲁棒性。
1 问题描述与分析
1.1 再入运动学模型
假设地球为静止圆球模型,描述飞行器运动状态的变量包括地心距r、经度λ、地心纬度φ、速度大小V、当地速度倾角θ、航迹偏角σ、攻角α以及倾侧角υ。以时间t为自变量的高超声速滑翔飞行器运动方程为:
(1)
式中:g=μ/r2为地球引力加速度,μ为地球引力常数;而L,D分别为升力加速度和阻力加速度的大小,即:
(2)
(3)
且二者满足关系:
(4)
式中:M为飞行器质量;Sr为参考面积;CL,CD为升力系数和阻力系数,通常为攻角α和飞行器马赫数Ma的函数;ρ为大气密度,有:
(5)
式中:Hs=7110 m,ρ0=1.225 kg/m3,H为飞行器飞行高度。
1.2 再入轨迹分段设计
本文将再入轨迹分为如图1所示各段。AB段为初始下降段,在此阶段以较大攻角与0倾侧角飞行,保证飞行器尽快进入再入飞行走廊,同时给后续飞行时间留有足够的调节余量。BC段为拉起段,使得飞行器平稳过渡至滑翔段并朝向目标飞行。CE段为准平衡滑翔段,其中,CD段为时间调整段,在滑翔末段DE段,本文采取能量管理方法,满足终端约束要求。EF为下压段,飞行器转入末制导阶段。本文主要针对AE段进行设计。
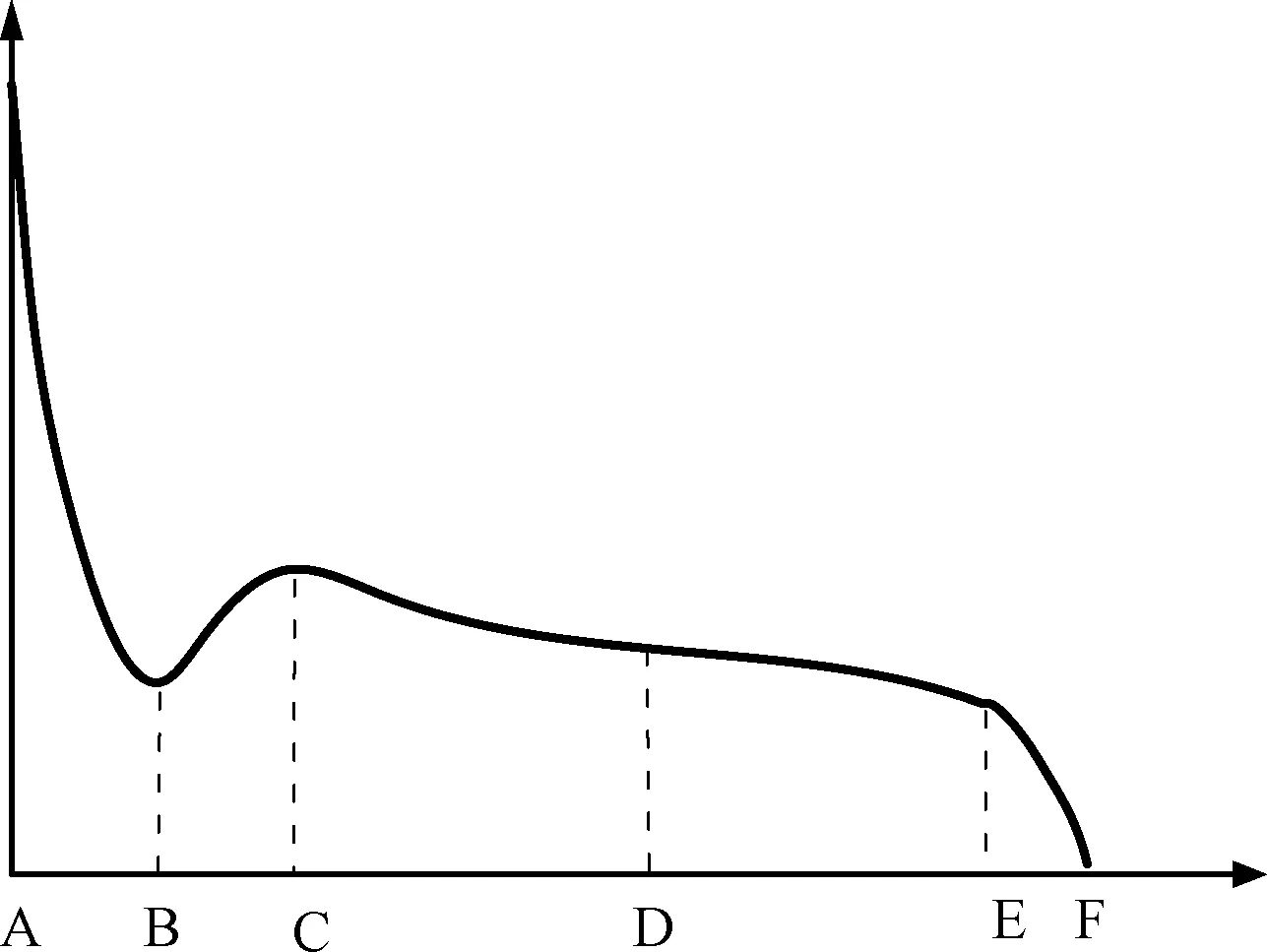
图1 再入轨迹分段示意图Fig.1 Gliding trajectory segmentation
综上,针对本文研究带有时间约束的滑翔段轨迹设计问题可以描述为,满足各项过程约束的前提下,在滑翔末端(E点)满足位置、高度以及速度大小约束以及飞行时间约束,即λE=λc,φE=φc,hE=hc,VE=Vc,tE=tc。其中,(λc,φc,hc,Vc,tc)为要求末端约束状态。
2 再入段制导律设计
首先,在速度系中构建以下运动学方程:
(6)

(7)

2.1 初始下降段制导律设计
在再入滑翔过程中,飞行器在临近空间长时间高速飞行,借鉴航天飞机再入攻角剖面的设计经验。在初始段以大攻角飞行,可以减轻热防护的负担,尽快进入再入飞行走廊。所以本阶段导引律为:
αc=αmax,υc=0
(8)
2.2 拉起段制导律设计
该阶段导引任务为:将飞行器平稳过渡至平衡滑翔段,并使飞行器朝向目标飞行,因此,需要分别构建纵向与侧向制导律。
根据本文飞行器飞行特性,在拉起段,攻角α=α0,由此,可以得到:
(9)
结合式(1)及准平衡滑翔条件,可以得到:
(10)
由此,可以得到期望高度变化率为:
(11)
(12)
结合式(5),可以得到:
(13)
将式(13)代入式(12),可以得到:
(14)
为了消除飞行器飞行过程中所产生的长周期震荡,使飞行器的轨迹倾角变化率小,实现平稳滑翔引入了高度变化反馈。结合式(9),可以得到纵向导引律为:
(15)

2.3 滑翔段制导律设计
为了完成带有时间约束的滑翔段制导律设计,需要对剩余时间有较为准确的估计。因此,本节首先根据准平衡滑翔条件推导剩余时间表达式,同时,以剩余待飞距离为指标,对滑翔末段进行能量管理,采用预测—校正方法可以得到本段到导引律。
由于飞行器高度H远小于地球半径Re,即r/Re≈1,结合式(1)可以得到:
(16)
即:
(17)
对上式两边进行积分,得到:
(18)
由此,可以得到剩余飞行时间的解析估算表达式为:
(19)
下面进行剩余航程解析估算式推导。由式(1)得到:
(20)
结合式(17),可以得到:
(21)
同样地,对上式进行积分,可以得到:
(22)
由此,可以得到剩余航程的估算表达式:
(23)
结合式(19)以及式(23),可以得到:
(24)

(25)
将式(24)代入式(25)可以得到:
(26)

(27)
(28)
2.4 能量管理段制导律设计
本段导引任务为:根据先前解析预测末速度与满足时间约束末速度比较,在本段通过改变倾侧角幅值与大小,消耗多余能量,从而满足终端约束。与上节类似,首先确定倾侧角大小,而后通过侧向边界确定调整倾侧角符号。
(29)
根据上式,需要的倾侧角可以通过下式计算:
(30)

(31)
3 仿真校验
为了验证本文时间制导律效果,首先在理想情况下,选取了3组初始再入条件不同的飞行器进行仿真比较。而后在第3.2节中,给出存在大气密度偏差、气动系数偏差、以及再入质量偏差等条件下本文算法仿真计算结果,进一步验证本文算法的导引效果。
3.1 算例一
本算例中主要校验不同初始状态条件下,本文方法导引效果。初始点经纬高分别为(0°,12.2°,80 km),(-0.12°,12.0°,80 km),(0°,12.1°,80 km)。目标点为(0°,53.4°,32.5 km),初始速度大小分别为6000 m/s,6080 m/s,5920 m/s。初始弹道倾角为-3°,初始方位角为0°,要求飞行时间为1235 s,末速度大小为1450 m/s。
仿真结果如图2所示:

图2 高度随时间变化曲线Fig.2 Altitude vs time

图3 经度随时间变化曲线Fig.3 Longitude vs time
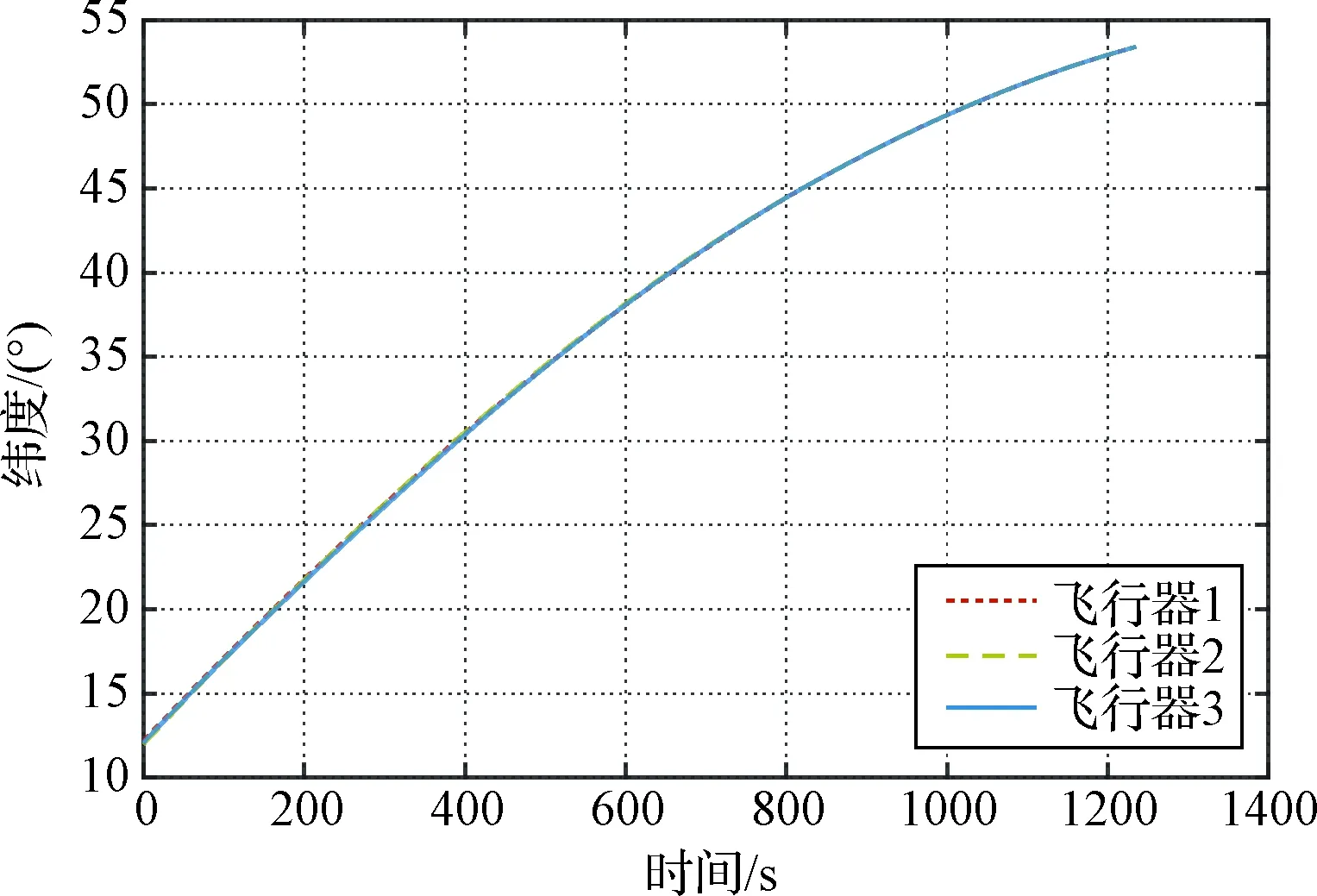
图4 滑翔全段纬度随时间变化曲线(0~1235 s)Fig.4 Latitude vs time (0~1235 s)
图5 纬度随时间变化局部曲线(430~510 s)Fig.5 Latitude vs time(430~510 s)

图6 纬度随时间变化局部曲线(1129~1132 s)Fig.6 Latitude vs time(1129~1132 s)
图7 攻角随时间变化曲线Fig.7 Attack angle vs time

图8 倾侧角随时间变化曲线Fig.8 Bank angle vs time
导引结果如表1所示:

表1 本文方法导引结果Table 1 Guidance results
以上仿真结果表明,图2,7表明为了快速进入飞行走廊,初始段采用固定最大攻角20°飞行,由于三者再入速度大小差异,导致拉起高度分别为46.06 km,46.54 km,45.95 km。图3,7,8表明在时间调整段,飞行器2由于速度最大,从223.8 s开始较先采用大倾侧角40°的制导方案,进行侧向机动实现减速,其他两飞行器开始侧向机动时间分别为252.7 s、405.6 s,同时为了满足末端能量要求,三者均进行了侧向机动,最大机动幅度分别为15.85 km、17.81 km、13.39 km且机动幅度呈现递减趋势,侧向偏差逐步收敛至0。图5,6分别为时间调整段和能量调整段纬度随时间变化图线,其结果表明,在滑翔初段,受初始飞行条件不同影响,各飞行器纬度差值最大为0.08°,而在能量调整段,各飞行器纬度差值最大已不超过0.01°。同样地,速度偏差在400~800 s内,最大差值为55 m /s;在800~1235 s内,最大仅为12 m/s,即在滑翔末段,各飞行器飞行状态趋于一致,时间约束指标给定较为合理。从表1可以得到,各飞行器均能精确满足时间约束,纬度偏差最大为0.02°,高度偏差最大为80.4 m。此算例结果表明,本文导引方法能精确满足飞行时间约束,并且其他终端约束偏差较小,能顺利实现交班。
3.2 算例二
第3.1节在理想情况下进行了仿真计算,本节算例考虑在存在大气密度偏差Δρ与气动力系数偏差ΔCL,ΔCD,初始质量偏差Δm的情况下,校验本文方法。

表2中的仿真结果表明,结合表1,表2导引结果,飞行器初始状态偏差对飞行时间以及终端飞行状态影响不大,其他干扰项对导引结果影响较为显著。进一步由仿真结果可以看出,在考虑再入质量偏差,气动系数偏出以及大气密度偏差的情况下,本文导引方法结果,飞行时间偏差最大仅为7.0 s,经纬高最大偏差分别为0.03°、0.01°、1.41 km。总体而言,本文终端状态误差较小,导引方法具有一定鲁棒性。
表2 本文方法导引结果Table 2 Guidance results
3.3 算例三
在本节中,首先在剩余时间和剩余射程估算方面,采用本文方法与文献[7]方法进行了仿真对比。仿真初始条件及过程约束均采用3.1节中飞行器1相关参数。仿真结果如表3所示。其次,针对具体飞行任务,应用本文和文献[7]方法进行了多组对比仿真。结果如表4所示。由表3可以看出,本文剩余飞行时间和航程估算方法具有较高精度,剩余航程最大相对偏差为1.20%,剩余飞行时间最大相对偏差为3.28%,并且在接近交班点过程中估计误差迅速降低,收敛至仿真结果。而文献[7]方法对剩余航程与剩余飞行最大相对偏差为24.62%、10.56%。对比文献[7]方法,本文估算方法大大提高了解析估算精度,对滑翔轨迹剩余航程及时间估测具有良好适用性,为满足时间约束的制导方法设计奠定了基础。从表4也可以看出,本文制导方法可以精确满足时间约束,最大相对偏差在0.1%内。而文献[7]导引结果最大相对偏差为13.08%,无法满足工程需求。
表3 对比仿真结果Table 3 Comparison of simulation results

表4 导引方法对比仿真结果Table 4 Comparison of guidance laws simulation results
4 结 论
本文在复杂约束条件下,完成了一种带有时间约束的再入滑翔轨迹的设计方法研究。仿真结果表明:在可行的给定时间约束范围内,本文制导方法能满足各项过程约束和端点约束,实现与末制导的顺利交班,并且本文提出的制导方法具有一定的鲁棒性。相较于文献[7]提出的方法而言,本文方法具有较高估算精度,并且导引方法可以精确满足末端约束。更为重要的是,本文方法并没有诸如速度恒定或者加速度恒定等严苛假设,更有利于工程实现。为无动力滑翔式飞行器协同飞行制导方法设计提供了一定的参考。
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06
商界评论(2022年1期)2022-04-13
北京航空航天大学学报(2021年4期)2021-11-24
军民两用技术与产品(2021年7期)2021-10-13
北京航空航天大学学报(2021年6期)2021-07-20
北京航空航天大学学报(2020年3期)2021-01-14
中国新技术新产品(2020年19期)2020-12-25
学生天地(2020年6期)2020-08-25
数学大王·趣味逻辑(2019年10期)2019-11-06
草原(2018年2期)2018-03-02
