
基于摄食声学的投饵系统设计
2020-05-21 07:57李志鹏王俊会刘皞春柯森蓝邵志锋陈志鹏陈立
水产养殖 2020年5期
李志鹏,王俊会,刘皞春,柯森蓝,邵志锋,陈志鹏,陈立
(广东海洋大学机械与动力工程学院,广东 湛江 524088)
随着我国水产养殖产业升级的持续推进,南海区域水产养殖业也得以快速发展[1]。在水产养殖作业环节中,投饲环节成本(包括饲料成本与劳动力成本)占总生产成本的70%~90%[2]。随着养殖规模的不断扩大,人工投料已不能满足产业的发展需求,采用自动投饵机进行投喂被认为是解决人工投喂劳动强度大,投饲不均和投饲量难以精确控制的有效途径。
目前,国内大部分的养殖区所采用的投饵机投饲效率低,投喂时间长,相关研发机构对饵料抛撒量的控制研究并不多[3]。这些投饵机大部分无法获知鱼群的摄食情况,容易造成大量饵料浪费。
为解决上述问题,提出一种基于摄食声学的投饵系统。该装置可通过罗非鱼摄食发出的声信号频率来判断深海养殖罗非鱼的摄食活力[3],控制投料机的启停。该装置有望提高深水网箱养殖的投饵效率,提高饵料的利用率,进一步减少投饲环节的劳动强度,实现投饲的科学决策按需投喂。
1 框架搭建
该文搭建的投饵装置如图1所示,通过控制舵机和电动推杆移动抛射口的横向位置和竖向位置,从而控制饲料的抛射方向和距离。两个抛撒装置安装于船的两侧,船载式投饵机的出料口经过Y型斜三通管分成两个管道,并在管道上安装电磁阀(如图2、3所示)。
2 控制系统设计
根据方案设计和要求,控制系统通过自行设计的系统硬件和基于单片机开发的相应软件来实现具体功能。软硬件系统相互协调完成对鱼体声音信息采集处理、投饵角度调整和投饵的启停动作。
2.1 控制程序设计
该产品的程序设计基于生产实际需求并结合选用的软硬件因素来设计,以达到产品功能的最优化。程序的基本逻辑思路如图4所示,具体为:STM32在完成了相关初始化以及自检工作后,电动推杆与舵机恢复到初始位置,人工操作上位机发送对应的指令至下位机使抛撒装置驱动舵机与电动推杆使饵料投送至目标投饵点。同时,水听器不断传送现场音频信息至上位机进行数据处理并分析鱼群的摄食活力,当分析到的鱼群摄食活力低于设定值时,下达投饵停止指令,下位机将电磁阀关闭。
2.2 控制系统硬件设计
控制系统硬件主要有单片机控制器、12 V开关电源、继电器模块、升压模块、降压稳压模块和电机驱动模块等组成,并且整个控制系统共地。系统框图(如图5所示)。
选用STM32F103ZET6作为主控制器,采用ARM Cortex-M3内核,运行速度快,时钟高达72 MHz,具有 11个定时器,配备13个通信接口,3个12位AD通道,自带的模数转换功能可以直接测量电动推杆中电位器的位置算出电动推杆的伸长量,总共具有112个IO口,以便以后为装置添加新功能[4-5]。
常闭式电磁阀DF-65F 24 V供电,经实际测量,单个电磁阀打开期间电流稳定在1.8 A。故该设计采用2路继电器模块控制2个电磁阀的开闭。采用2路继电器模块的原因:①继电器的接口负载比较大,一般都在10 A以上;②模块化设计;③使用寿命长,保证电路的稳定性。
电动推杆内由直流电机、丝杆螺母机构和电位器组成闭环控制系统,如图6所示,直流电机得电后转动,由丝杆螺母机构将直流电机的圆周运动转化成直线运动,通过电位器接入3.3 V测量直线运动的位移量,以模拟电压信号的形式反馈给单片机做调整处理,控制抛撒装置上下转动。
采用电机驱动模块来驱动电动推杆,含两个H桥的高电压大电流全桥式驱动器。将12 V直流电接入后可以直接用电机驱动模块按表1方式驱动电动推杆,将其PWM引脚置高电平,控制IN1和IN2引脚,以1表示高电平,0表示低电平。当IN1和IN2分别为1、0时模块输出电压是+12V,直流电机正转,电动推杆伸长;当IN1和IN2分别为0、0或1、1时模块输出电压是0 V,电动推杆停止运动;当IN1和IN2分别为0、1时模块输出电压是-12 V,直流电机反转,电动推杆缩短。
采用的舵机扭矩达38N·m,电源输入为12 V,带过载保护,与stm32单片机共地之后输入PWM脉冲信号即可控制,转动角度为270°,负责水平旋转机构的转动动作。

表1 电机接口控制信号逻辑
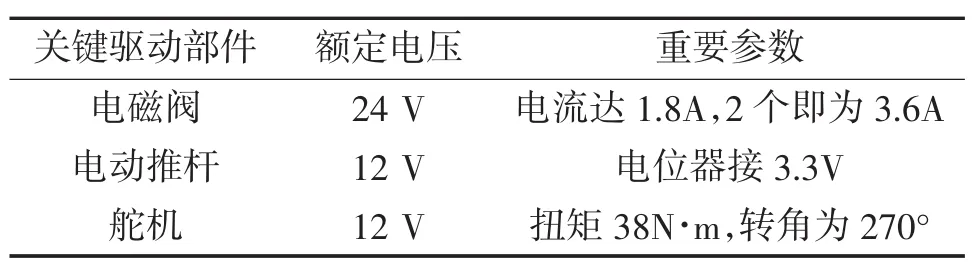
表2 各原动件关键参数
根据表2各原动件的用电参数,为方便供电,采用的12 V开关电源,具有过载/过压/短路保护功能,最高输出电流可达30 A,采用耐老、耐高温、耐冲击的排线,220 V交流电输入。采用限流为5 A的升压模块,将12 V开关电源的的电压转成24 V给电磁阀供电。
3 上位机识别系统设计
该系统采用Labview编程作为上位机实现。现代音频测量是数字测量系统要求最高的任务之一。要成功完成音频测量,软件必须能够完成多个任务(例如数据换算、滤波、分析与可视化)。从采集数据到显示数据,Labview具有确保精确测量的灵活性与模块性。并且NI提供了大量的Labview工具包,调用工具包即可组成一个完整的测量系统。Labview中配置的VISA函数可以根据使用仪器的类型调用相应的驱动程序,用户无需学习各种仪器的通信协议。Labview是可视化编程,作为上位机控制下位机时,控件的使用提高了操控的可观性。
3.1 声音频率测量
该部分由配置声音输入、读取声音输入、滤波器、停止声音输入采集、声音输入清零函数构成。
(1)配置声音输入函数:用于配置声音输入设备、采集数据并发送至缓冲。可根据需求选择设备、采样模式、采样数。根据奈奎斯特采样定理,用2倍于一个正弦波的频率进行采样就能完全真实地还原该波形,罗非鱼在吃饱时的声音频率在0~6 000 hz之间且可区分于背景噪声[3],因此为确保真实还原波形,将采样率设置为20 000 hz。
(2)滤波器:滤波器使用低通滤波,将高于6 khz的声音频率过滤掉。
3.2 判别是否继续投饵
对滤波器处理后的波形进行功率谱密度处理。将输出的动态数据转换为数组,对数组中0~6 000的数据及0~10 000的数据进行积分(即对应功率谱密度中0~6 000 hz及0~10 000 hz信号)。分析该深水网箱投饵前后0~6 000积分数值与对0~10 000积数值分比值,判断是否继续投饵。具体过程如下。
(1)使用频谱测量函数:将过滤后的声音信号波形进行功率谱密度转换,横轴为频率;纵轴为功率谱密度(power spectral density,PSD),即每单位频率波所携带功率,结果以dB形式输出。如图7所示。
(2)分析比值上限:对波形处理后的波形进行功率谱密度处理,将多次采集该深水网箱实际情况下过度投饵后的音频与保证鱼体饥饿情况下的音频各作积分处理,分析得出在过度投饵后,该深水网箱中上述结果的比值会在0.91~0.93之间。
(3)比值测试:根据上述结果设定比值超过0.9时,表示该声音采集区域的罗非鱼处于吃饱状态;否则,表示该声音采集区域的罗非鱼处于未吃饱状态。当比值超过0.9时程序会发出指令使投饵结束。
3.3 控制下位机
该部分通过VISA函数与下位机实行串口通信,在程序框图使用事件结构以及前面板的控件相结合实现对投饵舵机角度的控制。当程序没有接收到任何指令时,事件结构在潮湿10毫秒后直接跳过该步骤,执行下一项程序。当执行上位机对舵机的操控指令后,会在VISA读取中返回舵机信息,在读取缓冲区中创建的显示控件可以实施读取舵机角度的信息[6-7]。
4 结束语
在水产养殖应用方面的船载式投饵机大部分为人工持喷料管投饵,自动化程序低,人工成本大,而且投饵时机器无法得知鱼群的摄食情况,致使饵料大量浪费。抛撒装置有望代替人工持喷料管、智能启停投饵等特点,拥有广阔的市场应用前景,对缓解劳动力短缺,提高饵料利用率,减轻劳动强度,减少深海网箱养殖成本具有重要意义。
猜你喜欢
四川蚕业(2022年2期)2022-11-19
特种经济动植物(2022年2期)2022-02-15
草原与草业(2021年4期)2022-01-13
闽江学院学报(2021年5期)2021-11-19
今日农业(2021年1期)2021-03-19
当代水产(2021年1期)2021-03-19
四川蚕业(2021年1期)2021-02-12
兵器装备工程学报(2020年12期)2021-01-12
文萃报·周二版(2019年30期)2019-09-10
科技创新导报(2016年4期)2016-11-19
