
基于奇异值分解的多尺度变换域图像细化算法
2020-05-21 00:18
山东农业大学学报(自然科学版) 2020年2期
苏州信息职业技术学院 计算机科学与技术系,江苏 苏州215200.
多尺度变换域图像细化可理解为多尺度变换域图像骨架化的一种处理方法,细化是将多尺度变换域图像线条从多像素宽度处理成单位像素宽度的过程[1,2]。以往直接使用细化算法处理多尺度变换域图像时,原图像边缘连通性较差,这是因为该种方法未能充分提取多尺度变换域图像特征,导致多尺度变换域图像里目标特征点缺失、特征突出性较差、骨架连续性较差[3]。奇异值分解属于矩阵分解方法,其在信号处理、特征提取等很多领域中均占据一定地位[4]。本文提出基于奇异值分解的多尺度变换域图像细化算法,以期为图像处理提供有价值研究依据。
1 材料与方法
1.1 材料来源
多尺度变换域图像以指纹、不规则图像为例,如图1 所示。

图1 原始多尺度变换域图像Fig.1 Original multiscale transform domain
1.2 材料的处理
1.2.1 基于小波多尺度奇异值分解的图像特征提取算法 一幅多尺度变换域图像可看成一个矩阵,假定B是i×j的多尺度变换域图像的原图像,此个例能表示普遍情况,不属于特例[5]。矩阵与BTBBBT属于非负对称矩阵,并存在相同特征值。则多尺度变换域图像B能够分解成:

其中,矩阵V与U存在s个正交列Vi∈Pi、Ui∈Pj(1≤j≤s),i与j均表示数量词。方阵存在下述形式:



其中,C表示对角特征值,表示矩阵B奇异值。针对给定的多尺度变换域图像B而言,由于V与U属于正交矩阵[6]。因此,能够获取矩阵:

通过DB4 正交小波将多尺度变换域原图完成k层小波分解,获取3k+1 个子图Bi(1≤i≤3k+1)。针对各个子图Bi,若它的秩是Si,则子图Bi奇异值特征向量是:

多尺度变换域原图B多尺度奇异值特征向量是:

G的维数是
则基于小波多尺度奇异值分解的图像特征提取方法的详细步骤是:
输入:多尺度变换域图像数据库
输出:多尺度变换域图像特征库
算法流程
(1)将多尺度变换域图像数据库里各幅大小是m×n的多尺度变换域图像使用DB4 分为k层小波变换[7]。针对非一致多尺度变换域图像数据,k值也存在差异性,k值按照多尺度变换域图像大小设定。M表示多尺度变换域图像数据库里图像数量。获取差异尺度小波子段图像序列时,为了便于计算,小波子段图像序列简记成
1.2.2 一种有效的图像细化算法(1)判断需要留下的特征点。2.1 小节获取的多尺度变换域图像特征中,需要留下的图像特征点有以下四种:a.多尺度变换域图像里目标凸显部分;b.多尺度变换域图像里目标轮廓内点;c.多尺度变换域图像里目标轮廓交叉点;d.细化至宽度是2 之前不能判断是需去除的特征点。
假定目前考察的特征点是g,g点灰度值是1。设定g的4-邻点灰度值之和是∑4;g的8-邻域灰度值之和是∑8;g的8-邻域与16-环域灰度值之和是∑16;g点交叉数是M8。
为了让细化后的多尺度变换域图像可以体现原图像里目标突出部分,对目前特征点g考察它的8-邻域,如果g的8-邻域之和是1,那么目前特征点g的8-邻域存在唯一一个灰度值是1 的点,则此像素点被保留[9]。
考察目前特征点g的4-邻点,如果4-邻点的灰度值都是1,那么它为目标轮廓内点,需要留下;考察特征点g的8-邻域,留下4-邻点的和是1、交叉数M8不小于1 的特征点,以此能够保障细化后的多尺度变换域图像特征具有高度完整性。
针对细化至宽度是2 之前不能判断是否去除的特征点,使用图2 中检测模板特征点,如果两个模板检测结果存在1(真),那么留下目前特征点,以此能够保证多尺度变换域图像目前轮廓特征细化至单线时不出现断裂情况[10]。
2)去除冗余像素点。为保障多尺度变换域图像连通性,完成骨架中像素点之间单点连接,本文使用图3 两个模板完成冗余像素点检测,如果模板输出值是1(真),便去除目前像素点g。

图2 宽度是2 之前检测模板Fig.2 The detecting templates before width was 2

图3 检测模板Fig.3 Detecting templates
(3)去除冗余枝线。为了去除多尺度变换域图像细化后骨架图像里冗余枝线,将已得到的细化图像再次考察其骨架中各特征点交叉数M8,如果M8小于1,便去除[11]。
综上所述,多尺度变换域图像细化算法详细流程是:
步骤1:(1)根据自上至下、自左至右的次序扫描多尺度变换域图像,获取灰度值是1 的像素点,并设成目前考察特征点;(2)如果目前特征点符合设定条件∑4=1、∑8=1,便留下,跳至(6);
(3)如果目前特征点符合∑4=4,便留下,跳至(6);(4)如果目前特征点符合M8>1,便留下,跳至(6);(5)针对目前特征点,如果模板输出为1(真),便留下,反之去除目前特征点;(6)分析是否扫描全部像素点,反之,跳转至(1);(7)分析这次循环里是否存在删除特征点,如果存在,循环(1)到(6),直至此次循环里不存在特征点被去除。
步骤2:(1)根据自上至下、自左至右的次序扫描多尺度变换域图像。获取灰度值是1 的像素点,并设成目前考察特征点;(2)针对目前特征点而言,如果模板输出是1,便去除;(3)判定全部像素点是否扫描完毕,反之,跳至(1)。
步骤3:(1)根据自上至下、自左至右的次序扫描多尺度变换域图像,获取灰度值是1 的像素点,并设成目前考察特征点;(2)如果目前特征点不符合条件M8>1,便去除;(3)判定全部像素点是否扫描完毕、全部细化[12]。反之,跳至(1)。
2 结果与分析
2.1 图像细化效果与图像特征提取的关系
多尺度变换域图像细化效果与图像特征提取存在较大关联性,特征提取全面,则图像细化完整性较好,但特征点中也包含了冗余像素点与枝线,因此,依次设定图像特征点数量是5 个、10 个、15 个、20 个、25 个、30 个,采用三种算法对其细化,统计图像细化过程中冗余像素点与枝线去除情况,对比结果如表1 所示。
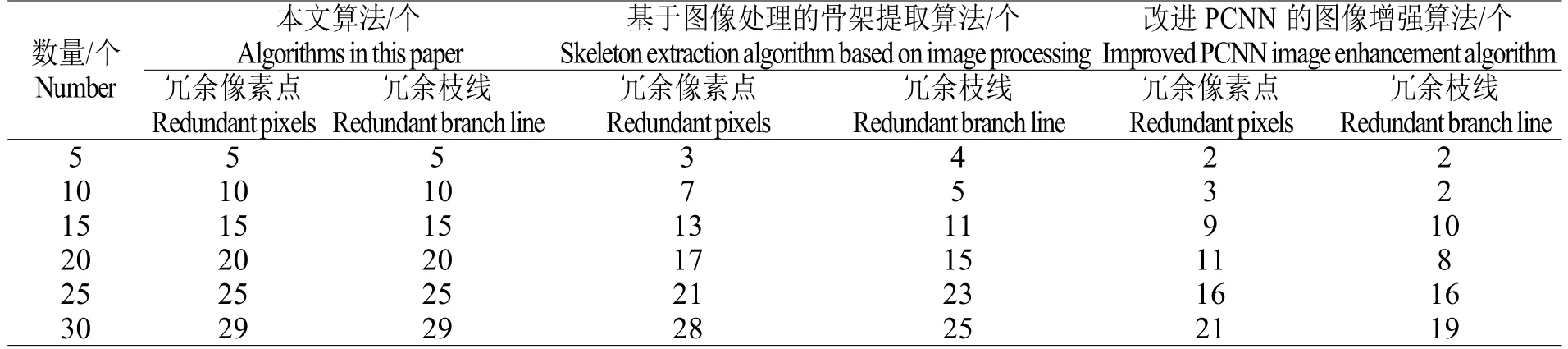
表1 三种算法冗余特征去除情况Table 1 Redundancy feature removal of the three algorithms
由表1 可知,当图像冗余特征数量为5 个、10 个、15 个、20 个、25 个时,本文算法能够完全去除图像中冗余像素点和枝线,当冗余特征数量达到30 个时,本文算法在细化图像过程中对冗余像素点与枝线的去除情况与实际数量存在1 个偏差;而基于图像处理的骨架提取算法与改进PCNN 的图像增强算法不能完全去除图像中冗余像素点和枝线,这也说明上述实验中该两种方法细化效果差的原因。由此可知,三种算法图像细化对比实验中,本文算法对多尺度变换域图像细化效果最优。
2.2 图像细化测试
本文算法处理后图像纹理清楚,骨架分明,且连通性较好。说明本文算法满足图像细化要求,细化效果极好。
采用本文算法、基于图像处理的骨架提取算法以及改进PCNN 的图像增强算法进行对比实验,测试三种算法对同一图像的细化效果,基于图像处理的骨架提取算法和改进PCNN 的图像增强算法的细化效果如图4、图5 所示。


对比图4 与图5 可知,采用基于图像处理的骨架提取算法细化图像后,指纹脉络清晰,但细化后图像纹络存在毛刺现象,导致指纹脉络方向存在偏差;采用改进PCNN 的图像增强算法细化图像后,图像不仅存在毛刺现象,而且指纹脉络出现断点,骨架连通性较差。经算法细化效果对比,本文算法细化效果最优。
3 讨论
深入研究多尺度变换域图像细化问题,提出基于奇异值分解的多尺度变换域图像细化算法,基于奇异值分解的多尺度变换域图像细化算法与以往细化算法相比,不同之处在于该算法在细化图像之前,先采用基于小波多尺度奇异值分解的图像特征提取算法,提取多尺度变换域图像中全部目标特征点,基于提取的图像特征点,使用一种有效的图像细化算法判断图像细化时需留下的特征点,去除图像中冗余像素点与冗余枝线,完成多尺度变换域图像细化,以此确保细化后的多尺度变换域图像骨架具有较高连通性。
4 结论
本文提出一种基于奇异值分解的多尺度变换域图像细化算法,并将其应用于实验测试中,经测试,该算法对多尺度变换域指纹、不规则图像的细化效果较好,细化后图像不存在毛刺现象,且指纹脉络不存点断点,连通性极好,细化效果符合图像细化标准。
图像细化是获取图像结构与骨架像素的核心技术,在细化工程中,需要着重关注下述几点:
(1)所有的细化方法都不具有通用性,不能符合全部细化情况;
(2)细化是获取图像骨架的过程,获取的骨架存在实质意义,骨架决定细化效果,而细化无法定义骨架,因此,图像细化效果必须遵循实际。
(3)图像细化获取的图像骨架,必须具有高度连通性,连通性较差,则图像细化效果较差。
猜你喜欢
农业工程学报(2022年12期)2022-09-09
流行色(2022年7期)2022-08-31
风景园林(2022年7期)2022-07-15
电光与控制(2022年6期)2022-06-23
合肥工业大学学报(自然科学版)(2021年11期)2021-12-10
雷锋(2021年12期)2021-04-12
现代电子技术(2021年1期)2021-01-17
有色金属材料与工程(2020年5期)2020-11-27
现代电子技术(2018年18期)2018-09-12
劳动保护(2018年5期)2018-06-05
