
基于AC-DC-AC的异步电机系统积分反步和滑模控制
2020-05-26 01:17张晖鹏于海生刘旭东吴贺荣
微特电机 2020年5期
张晖鹏,于海生,刘旭东,吴贺荣
(青岛大学,青岛 266071)
0 引 言
近年来,随着现代电力电子技术和绿色能源技术的发展和需求,交直交变换器(以下简称AC-DC-AC)在各类电力电子领域得到了大范围的应用[1-3]。针对由电力二极管组成的变流器存在着直流母线电压不可控制、电机制动时产生的能量存在大量的谐波,无法回馈到电网中的问题[4-5],目前,变流器通常采用绝缘栅双极型晶体管。基于AC-DC-AC的异步电机系统主要由两个背靠背变流器组成,构成了网侧子系统和机侧子系统。两个变流器之间由直流支撑电容连接,具有储存能量、稳定直流侧电压,缓冲网侧子系统和机侧子系统的能量交换、滤除直流侧电压的谐波的作用[6-7]。
文献[8]提出了对网侧子系统电压定向矢量控制、机侧子系统磁场定向矢量控制,提高了系统的动态性能,但存在直流母线电压,当负载较大变化时,波动较大,抗干扰能力差的问题。针对基于AC-DC-AC的异步电机系统,当异步电机负载发生较大变化时,连接网侧子系统和机侧子系统的电容无法储存过多的能量,导致直流母线电压波动较大的问题[9-10],文献[11]提出了负载电流反馈的控制方法,通过调整网侧子系统有功电流使直流母线电压快速稳定,但存在着延迟的问题。
本文采用积分反步与滑模相结合的控制方法,实现了基于AC-DC-AC的异步电机系统在负载发生较大变化时,直流母线电压快速恒定且可控,系统起动时抑制电压超调,未知负载可观测。将本文的控制策略和基于AC-DC-AC的异步电机系统在网、机两侧子系统通过矢量控制进行比较研究。
1 系统的整体设计方案
基于AC-DC-AC的异步电机系统由网侧子系统和机侧子系统两部分组成,网侧子系统和机侧子系统采用积分反步与滑模相结合的控制方法,系统设计框图如图1所示。网侧子系统主要由PWM变流器和电网组成,机侧子系统主要由PWM变流器和异步电机组成,网侧子系统和机侧子系统由中间电容环节连接。
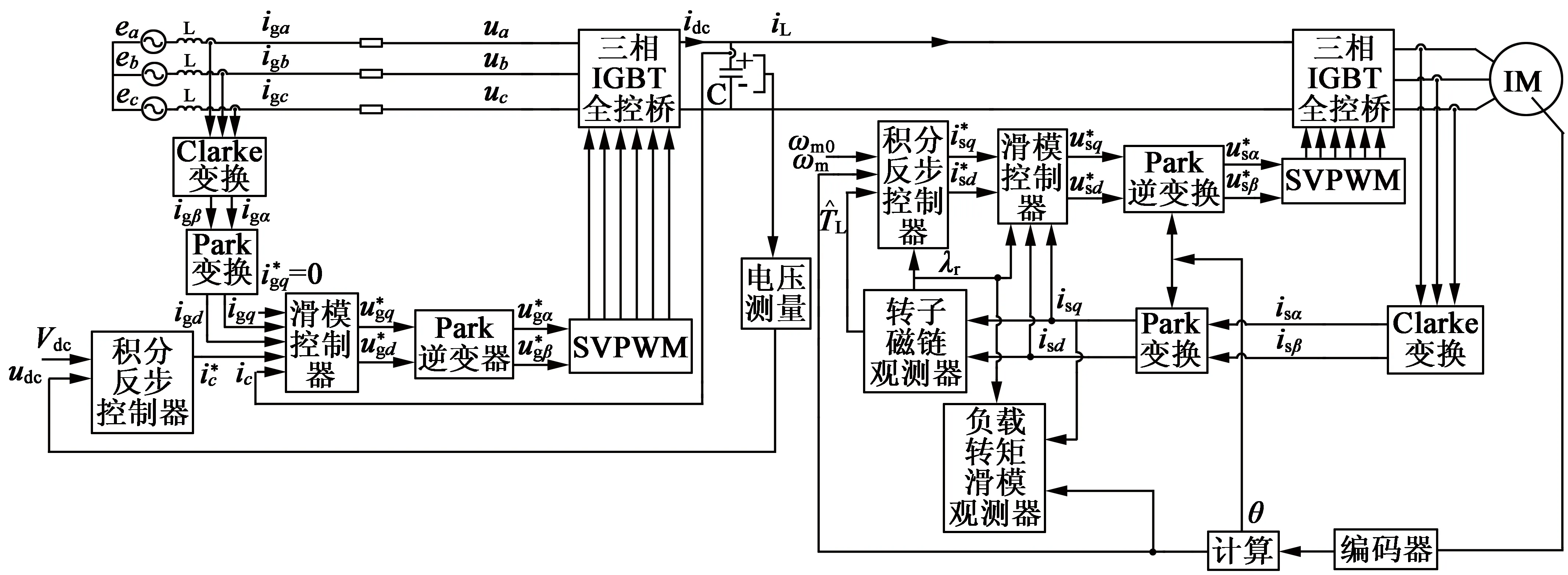
图1 系统设计框图
2 基于AC-DC-AC的异步电机系统数学模型
2.1 网侧子系统数学模型
网侧子系统变换器d,q轴下的模型[12]:
(1)
式中:igd,igq是在d,q轴上的电流值;ugd,ugq是在d,q轴上的电压值;ed,eq是网侧三相电压在d,q轴上的值,并且eq的值为0;ωg为网侧角速度;idc为网侧子系统电流,udc为母线直流电压;iL为负载电流,iC为电容电流。
2.2 机侧子系统数学模型
异步电机在d,q轴下,按φrq=0,其数学模型[13]:
(2)

3 基于AC-DC-AC的异步电机系统控制器设计
3.1 网侧子系统控制器设计
网侧子系统采用积分反步与滑模相结合的控制方法。控制目标为保证网侧子系统单位功率因数运行;直流母线电压可控;当机侧子系统负载发生较大变化时,网侧子系统直流母线电压将发生较大变化,实现直流母线电压快速恢复至恒定。网侧子系统和机侧子系统能量实现双向流动。
3.1.1 电压外环积分反步控制器设计
将网侧子系统电压外环的参考值与实际值误差s0=Vdc-udc设定为虚拟控制误差,可得:
(3)
式中:Vdc为电压给定值。
构建Lyapunov函数:
(4)
求导得:
(5)
由式(1)中第三式、式(3)和式(5),可得:
(6)
3.1.2 电流内环滑模控制器设计
网侧子系统电流内环采用电容电流控制,从而达到直流母线电压快速恒定的目的。如果网侧子系统和机侧子系统功率平衡,则:
Pg=Pm
(7)
式中:Pg为网侧子系统功率;Pm为机侧子系统功率。
网侧子系统功率可表示:
(8)
机侧子系统功率可表示:
(9)
整个系统流入电容的电流:
iC=idc-iL
(10)
则由整个系统推导可得:
(11)
选取电流内环的滑模面:
(12)
选取指数趋近律:

(13)
式中:ε>0;k为待定系数。
由式(1)中第二和第三式、式(12)和式(13),可得:
(14)
式中:ε0>0;ε1>0;r0>0;r1>0;k1;k2为待定系数。
3.1.3 网侧子系统电压软给定设计
将网侧子系统直流母线电压由阶跃给定改为指数给定,从而抑制系统起动时电压超调和冲击电流过大的问题[14]。设计如下:
Vdc=Vdcm(1-e-t/T)
(15)
式中:Vdcm为电压稳态值;Vdc为电压设定值;t为运行时间;T为时间常数。
3.2 机侧子系统控制器设计
机侧子系统采用积分反步与滑模相结合的控制方法。控制目标为异步电机机械角速度达到设定值,网侧子系统和机侧子系统能量实现双向流动。负载转矩发生变化时,可通过滑模观测器观测。
3.2.1 滑模观测器设计[15]
基于AC-DC-AC的异步电机系统,在实际运行情况下,机侧子系统的负载转矩变化是未知的,需采用观测器观测系统中未知的负载转矩[16-17]。本文采用滑模观测器,对未知负载进行观测。将异步电机的负载转矩和机械角速度作为状态变量,可得:
(16)

(17)

(18)
(19)
3.2.2 转子角速度外环和磁链外环积分反步控制器设计
将机侧子系统转子角速度外环的参考值与实际值误差s5=ωm0-ωm设定为虚拟控制误差,可得:
(20)
构建Lyapunov函数:
(21)
对V3求导,可得:
(22)
由式(2)中第一式、式(20)和式(22),可得:
(23)
(24)
构建Lyapunov函数:
(25)
对V4求导,可得:
(26)
由式(2)中第二式、式(24)和式(26),可得:
(27)
3.2.3 电流内环滑模控制器设计
设计电流内环滑模面:
(28)
选取指数趋近律:
(29)
式中:ε>0;k为待定系数。
由式(2)中第三和第四式、式(28)和式(29),可得:
(30)
式中:ε2>0;ε3>0;r2>0;r3>0;k6;k7为待定系数。
4 仿真结果
本文用MATLAB/Simulink仿真软件对基于AC-DC-AC的异步电机系统控制方法进行仿真分析。
网侧子系统参数:R=1 Ω,Em=380 V,ωg=100 rad/s,C=1 100 μF,r0=r1=0.01,ε0=ε1=2.5,Vdcm=650 V,Vdc=650 V,L=15 mH,T=0.05 s,k0=20,k1=100,k2=150,kc=7.5。
机侧子系统参数:异步电机电压V=380 V,Rs=0.214 7 Ω,Rr=0.642 Ω,Jm=0.03 kg·m2,fn=50 Hz,p=2,ε2=ε3=0.1,Lr=0.0852H,r3=5000,r4=5 000,k3=300,g=-2.5,k4=500,k5=100,k6=700,k7=1 200,kq=400,kd=80。

网侧子系统直流母线电压曲线如图2、图3所示。从图2看出,当系统运行时,积分反步与滑模控制的直流母线电压能够稳定在电压设定值处。在加入电压软给定后,直流母线电压的超调得到有效抑制。从图3看出,电压定向矢量控制超调量超过恒定值的15%,调节时间为0.08 s,积分反步与滑模控制加入电压软给定后,超调量超出恒定值的4%,调节时间为0.04 s。因此,积分反步控制与滑模控制比电压定向矢量控制效果更好。
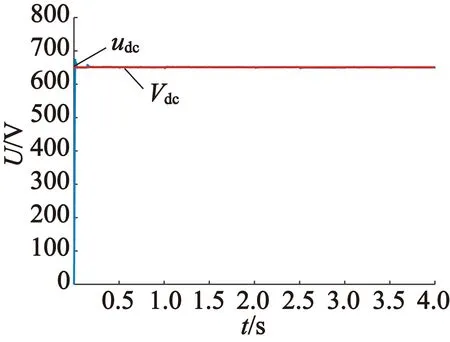
图2 直流母线电压曲线

图3 直流母线电压对比曲线 机侧子系统异步电机机械角速度对比曲线如图4所示,电磁转矩与负载转矩对比曲线如图5所示。从图4和图5看出,基于AC-DC-AC的异步电机系统实现了四象限运行。在0~1 s时,ωm>0,eT=Te-TL>0,此时系统运行在第一象限;在1~2 s时,ωm>0,eT=Te-TL<0,此时系统运行在第二象限;在2~3 s时,ωm<0,eT=Te-TL>0,此时系统运行在第三象限;在3~4 s时,ωm<0,eT=Te-TL<0,此时系统运行在第四象限。相比于磁场定向矢量控制,积分反步与滑模相结合的控制在异步电机机械角速度、电磁转矩方面的控制效果更优,控制精度更好。
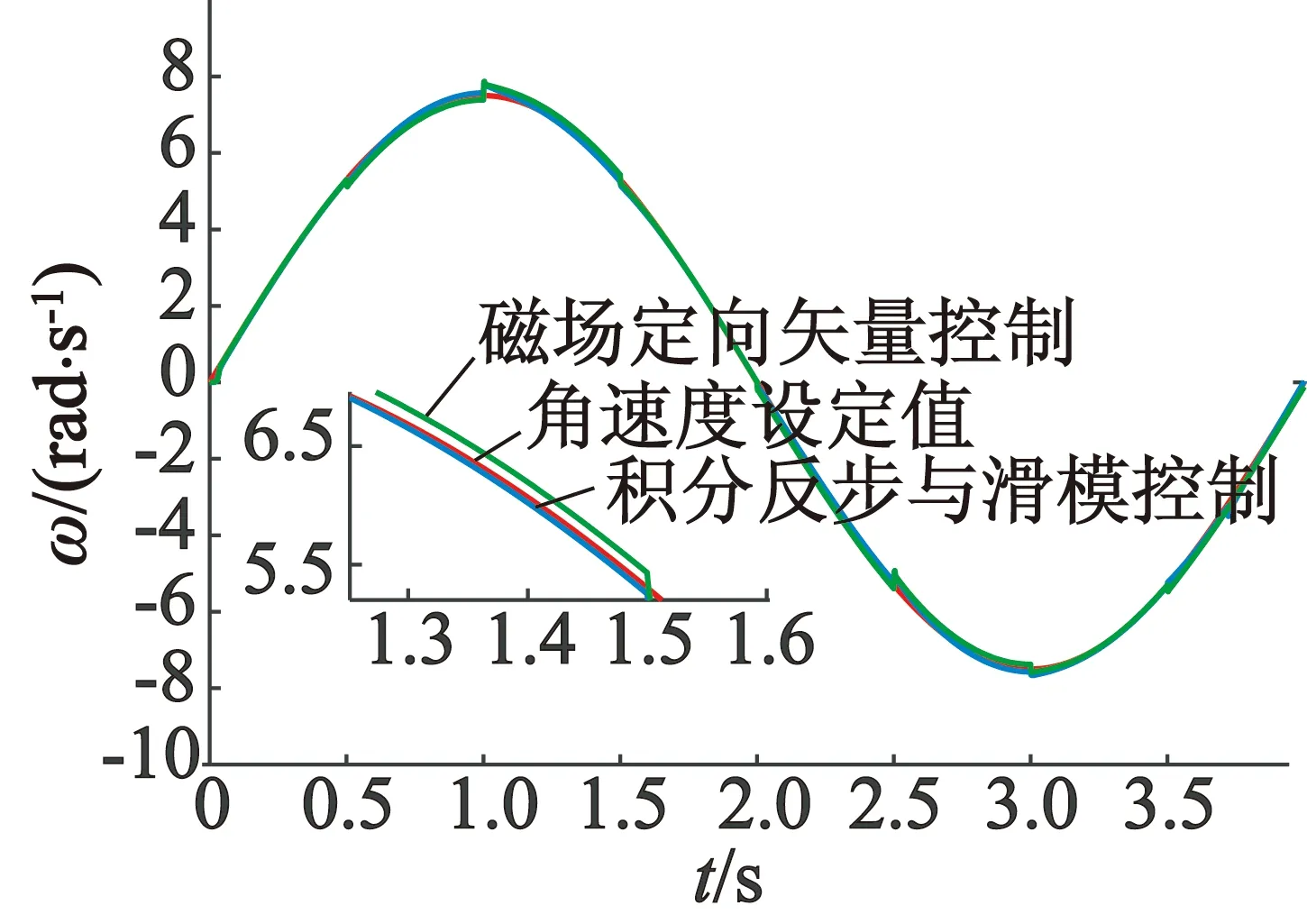
图4 机侧角速度对比曲线

图5 转矩对比曲线
在机侧子系统负载突加8 N·m时,积分反步与滑模控制和电压定向矢量控制对比曲线如图6所示,滑模观测器观测曲线如图7所示。从图6看出,积分反步与滑模控制比电压定向矢量控制过渡时间短,系统控制精度高。从图7看出,滑模观测器对机侧子系统负载的变化可观测并且能够精确快速跟踪。
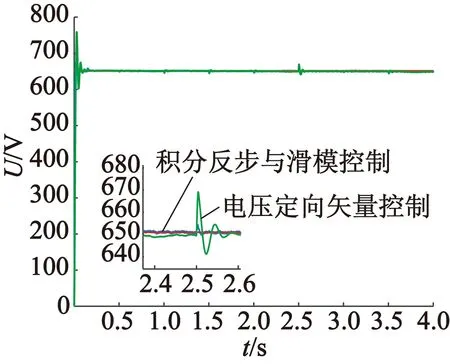
图6 突加负载直流
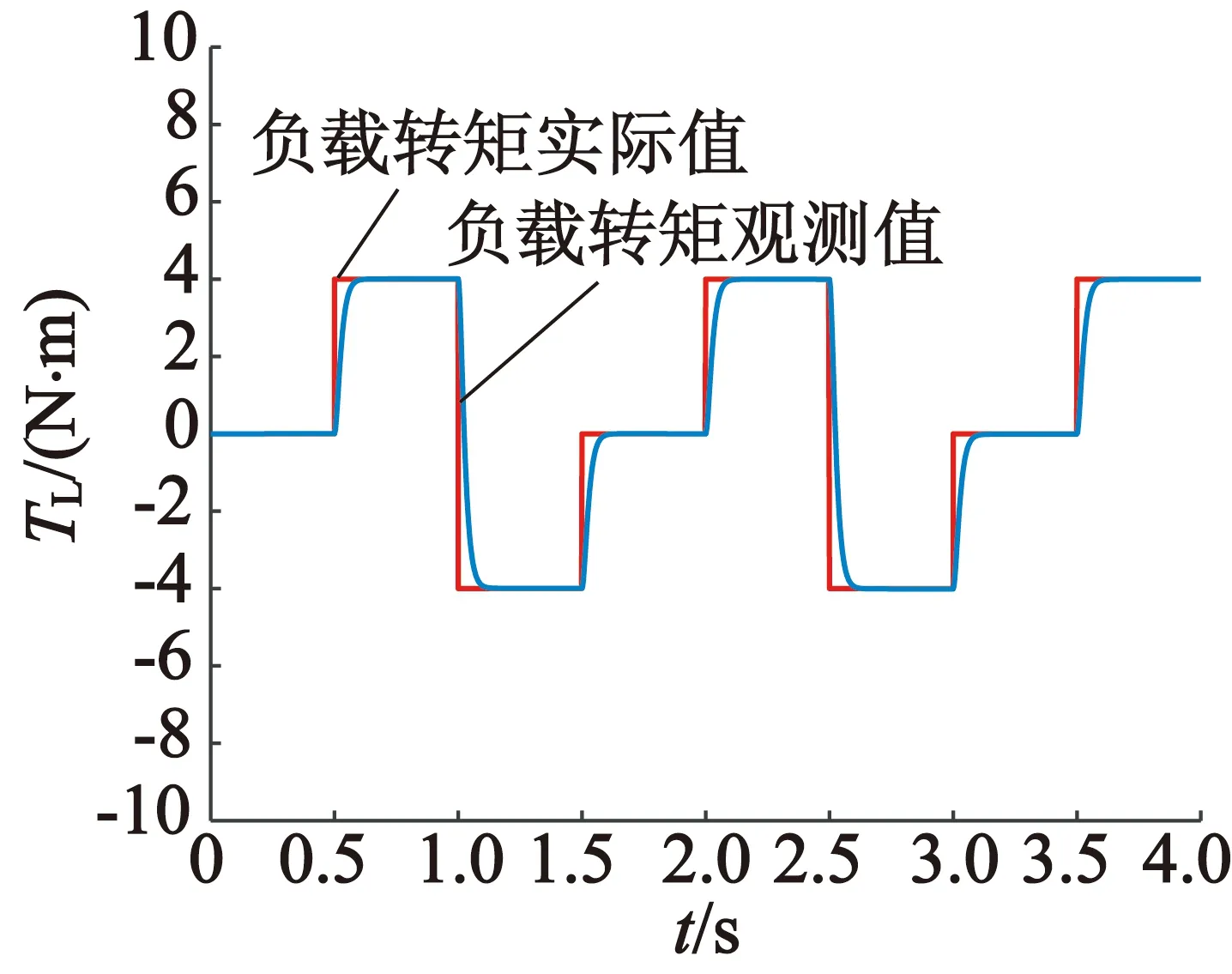
图7 负载转矩观测曲线
5 结 语
本文研究基于AC-DC-AC的异步电机系统,采用积分反步与滑模相结合的控制方法,实现了四象限运行、直流母线电压恒定可控、网侧子系统和机侧子系统之间能量双向流动的预期目标。针对负载变化较大时,直流母线电压出现波动大的问题,本文网侧子系统电流内环采用电容电流控制,保证了直流母线电压能够快速恢复恒定且可控。本文提出了网侧子系统的电压软给定,解决了在基于AC-DC-AC的异步电机系统刚起动时,直流母线电压存在超调的问题。机侧子系统采用了滑模观测器,保证了当机侧子系统的负载发生变化时,能够对未知负载转矩进行跟踪和观测。仿真实验中,将提出的控制策略和矢量控制进行比较,仿真结果表明,本文提出的控制策略优于矢量控制,具有一定的应用参考价值。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
防爆电机(2022年3期)2022-06-17
大电机技术(2022年2期)2022-06-05
防爆电机(2022年2期)2022-04-26
科技信息·学术版(2021年7期)2021-01-10
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
防爆电机(2020年4期)2020-12-14
煤矿机电(2020年5期)2020-11-02
课程教育研究·学法教法研究(2018年20期)2018-08-11
