
舰船加筋板结构的圆孔形穿甲损伤识别方法
2020-05-28 06:34吴昊刘维勤胡雨晨
中国舰船研究 2020年2期
吴昊,刘维勤,胡雨晨
武汉理工大学 高性能舰船技术教育部重点实验室,湖北 武汉 430063
0 引 言
舰船在执行作战任务的过程中受到损伤会对舰船性能造成影响,其程度会因损伤部位及大小的不同而有所不同。因此,受损后实时判断和反馈舰船作战能力、结构安全性以及结构损伤识别、定位、诊断、剩余强度预报的结果,对于辅助指挥人员及时做出合理决策具有十分重要的意义。
对结构损伤的识别目前大致可以分为局部和整体2类方法。前者包括染色渗透、超声波、X和γ射线照相、光干涉、电磁学监测、涡流及热力学等方法;后者基于结构响应(含静力响应和动力响应),是结构物理特性(质量、阻尼和刚度)函数的基本原理,若改变结构的物理特性,将会引起结构响应发生变化,根据其改变量,即可确定结构损伤的部位及程度[1]。对于整体损伤识别,主要有3种方法,即基于模态域数据、基于时域数据和基于时频域数据的方法,而基于模态域数据的方法中又包括了固有频率、振型、应变模态、模态应变能、柔度、动态残余向量、频率响应函数等方法。
舰船是一个大型的复杂结构,若采用局部方法来识别损伤,需要逐项检测,故费时费力。而整体方法则可以解决此问题。目前,整体损伤识别方法在桥梁结构中的应用已较为成熟,但与桥梁等结构的损伤识别问题相比,舰船结构的损伤识别更加复杂,并存在3个方面的特殊性:首先,使用环境迥异,舰船结构所处的海洋环境复杂恶劣、背景噪声极大,基于时域法的识别很难实现。这是因为该方法直接使用测得的时域数据,虽然结构响应中与损伤有关的信号特征不会产生数据误差,但是有可能被与损伤无关的信号所掩没,尤其是激励源或环境状态发生变化时,将导致信号严重失真[2];其次,与桥梁等工程结构损伤识别中关注的结构老化不同,后者关注的是战时损伤,即导弹或炮弹攻击后侵彻甲板及爆炸引起的大口径结构损伤。目前,应用基于模态域数据的振型法及振型衍生的损伤特征参数来识别结构损伤尚存在困难,其原因是上述方法需要多而密的测点,而这对于舰船结构战时损伤、传感器大量失效的情况来说,识别成本过高;最后,越快地识别出损伤并获得诊断结果,对于帮助指挥人员做出正确决策的作用就越大,而模态域数据中结构固有频率易测量、精度高,尤其重要的是其测量与测点位置无关,故是一种较为可行的方法。
在基于模态域数据的固有频率法的结构损伤识别应用方面,Cawley等[3]首先基于有限元和固有频率的变化来判断损伤位置,实现了单一损伤识别;Williams等[4]同样通过固有频率的变化对多损伤的结构进行了损伤识别分析,通过比较和分析完好结构的固有频率与损伤结构的固有频率确定了损伤位置。然而,现有的基于固有频率的损伤识别方法均不适用于舰船战时结构损伤的识别,原因是战时损伤识别的目的在于预报结构受损后的剩余极限强度,以此来判断舰船是否还具备作战能力、结构是否仍然安全,而此方法却无法做到这点。而若通过神经网络方法提前建立舰船结构损伤和剩余极限强度的数据库,就可以快速预报舰船受损后的剩余极限强度。
本文拟结合基于模态域数据的固有频率法和神经网络方法,以舰船中普遍存在的加筋板结构作为研究对象,开展舰船损伤识别的数值仿真研究。首先,将加筋板前3阶模态的固有频率作为特征参数,输入概率神经网络(probabilistic neural networks, PNN),对加筋板的圆孔形穿甲损伤进行识别;然后,采用结合模态特征和加速度方差的结构损伤识别方法,解决固有频率无法区分结构对称性的问题,完成加筋板结构的损伤识别。
1 概率神经网络
损伤识别本质上是一种模式分类问题。PNN是Specht于1989年提出的一种结构简单、应用广泛的神经网络。PNN容易设计算法,可运用线性学习算法实现非线性学习算法的功能,故在模式分类问题中得到了广泛应用[5]。PNN的理论基础是贝叶斯最小风险准则,即贝叶斯决策理论。假设分类问题是二分类,即A=A1或A=A2,两种类别的先验概率分别表示为

式中:h1为类别A1的先验概率;h2为类别A2的先验概率。
给定输入向量x=[x1, x2,···, xn]为得到的一 组观测结果,并根据式(2)进行分类。

式中,p(A1|x)为给定输入向量x发生的情况下,类别A1的后验概率。
根据贝叶斯公式:

在分类决策时,应将输入向量分到后验概率较大的类别中。实际应用中,通常还需要考虑损失与风险,若是将A1类的样本错分为A2类和将A2类的样本错分为A1类,其造成的损失一般相差很大。因此,需要调整分类规则。这里,定义动作αi为将输入向量指派到Ai的动作,则αi的期望风险为

式中:λij为输入向量属于Aj时采取动作αi所造成的损失;fi为类别Ai的概率密度函数。
则贝叶斯判定规则变为

PNN由输入层、隐含层、求和层和输出层组成。输入层用于接收来自训练样本的值,将数据传递给隐含层。隐含层的每个神经元节点拥有一个中心,该层接收输入层的样本输入,计算输入向量与中心的距离,最后返回一个标量值,输入向量x输入到隐含层,隐含层中第i类模式的第j个神经元所确定的输入或输入关系φij(x)由下式定义:

式中:i=1,2,…,M,M为训练样本的分类数;d为样本空间的维数;xij为第i类样本的第j个中心;σ为平滑参数,通过经验或聚类法得到。求和层将隐含层中属于同一类的隐含神经元的输出做加权平均:

式中:vi为第i类类别的输出;L为第i类的神经元个数。
输出层取求和层中最大的一个作为输出的类别:

综上,PNN模型具有如下优点[6-10]:
1) 结构简单,多采用顺序数据计算结构,方便开发和设计多种复杂故障类型;
2) 具有多元化的特点,可以同时进行故障二次分类和多次分类;
3) 兼容性较好,故障模式及相关的故障类型分类清晰;
4) 故障模型中的输入层可以采用径向基输入模式,故障检测时间短;
5) 故障诊断的正确率高,误判故障的机率较小,输出的故障诊断结果列表简单清晰。
此外,PNN各层神经元的数目比较固定,故易于硬件实现。而对实际工程应用而言,可行性非常重要。
2 基于固有频率和PNN的舰船损伤识别
鉴于结构固有频率易测量、精度高且与测点位置无关,以及PNN收敛速度快、适于实时处理的优点,将其结合使用可满足舰船结构损伤识别的特殊性要求。因此,本文采用将结构前n阶模态的固有频率作为特征参数的PNN进行舰船损伤识别研究。由于以固有频率为特征参数不能识别对称位置的损伤,所以输入神经网络的特征向量时加入了一个特征参数来区分对称位置。通过数值仿真来测试神经网络对损伤位置的诊断效果。
2.1 建立有限元模型
加筋板是舰船普遍使用的基本结构。本文构建了如图1所示的钢材料加筋板仿真模型,其主尺度(长×宽×厚)为4 000 mm×1 000 mm×3 mm。其他参数包括:材料弹性模量E=2.06 GPa,泊松比μ=0.3,密度ρ=7.85×103kg/m3。

图 1 加筋板模型Fig. 1 Stiffened panel model
2.2 损伤设置
为简化研究,将加筋板的损伤形式设定为圆孔形穿甲损伤。损伤程度按损伤孔半径分为3种类型(100,200,400 mm)。鉴于加筋板存在对称性,只在加筋板1/4的范围内设置了损伤,如图2所示。图中数字表示损伤孔圆心所在位置编号,共选取典型损伤位置15处,包括板格中心、强弱构件上、节点处。表1给出了损伤工况设计。根据损伤孔位置和损伤孔半径的不同,共设计了包括无损伤工况在内20个损伤工况。
理论上,样本库越丰富越好,但由于资源限

图 2 损伤位置Fig. 2 Damage location
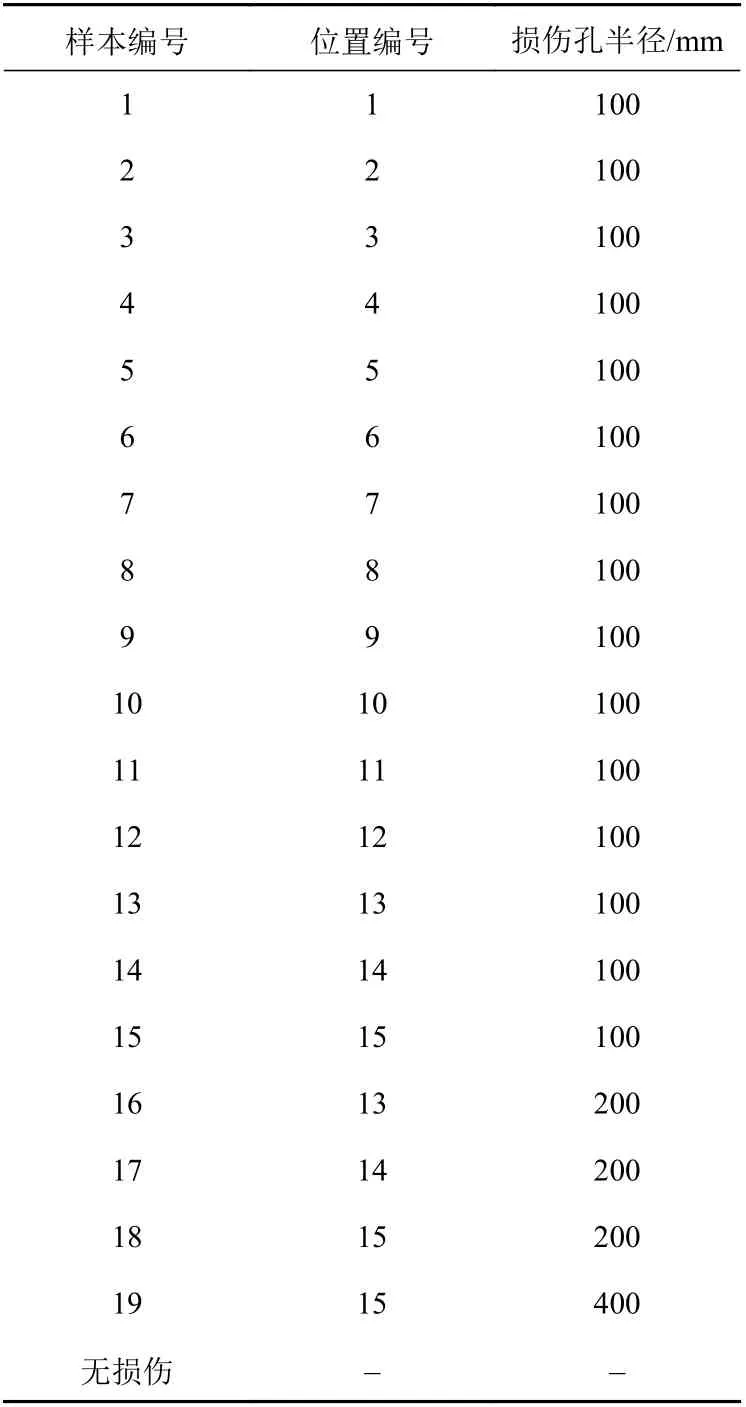
表 1 概率神经网络损伤样本Table 1 Damage samples of probabilistic neural network
制,考虑到本文中的加筋板模型尺寸较小、结构简单且验证结果较好,故初次训练的样本数量取20个是可以接受的。
2.3 神经网络训练与测试
首先,本文采用将加筋板前n阶模态的固有频率作为特征参数的PNN进行舰船损伤识别研究。为得到各损伤工况PNN的特征参数,对各工况下的加筋板模型进行了模态分析,得到了各工况下加筋板的固有频率。理论上,当各损伤样本特征参数包含的数据量相对较大时,独特性也相对越强,可识别性也就越大,但同时考虑到要避免振动测量中的节点效应,并考虑工程测试中高阶模态频率误差相对较大的实情,实测频率仅选取了前3阶固有频率值进行识别[11]。图3~图5所示为损伤样本1,7,13加筋板模型的模态。
然后,在得到各个损伤工况下加筋板模型的前3阶模态后,将前3阶模态的固有频率作为加筋板模型损伤工况输入神经网络的特征参数。表2给出了加筋板模型前3阶模态的固有频率。
最后,将各个损伤工况下加筋板模型前3阶模态的固有频率组成一个三维向量,作为神经网络训练样本的特征向量输入其中进行训练,得到训练之后的PNN,然后设计以下测试样本检测训练得到的PNN的识别效果。表3给出的即是这3个测试样本前3阶模态的固有频率,图6所示为3个测试样本的损伤位置,表4给出了损伤识别测试结果。

图 3 损伤样本1的前3阶模态Fig. 3 The first three modes of the damage sample-1

图 4 损伤样本7的前3阶模态Fig. 4 The first three modes of the damage sample-7

图 5 损伤样本13的前3阶模态Fig. 5 The first three modes of the damage sample-13
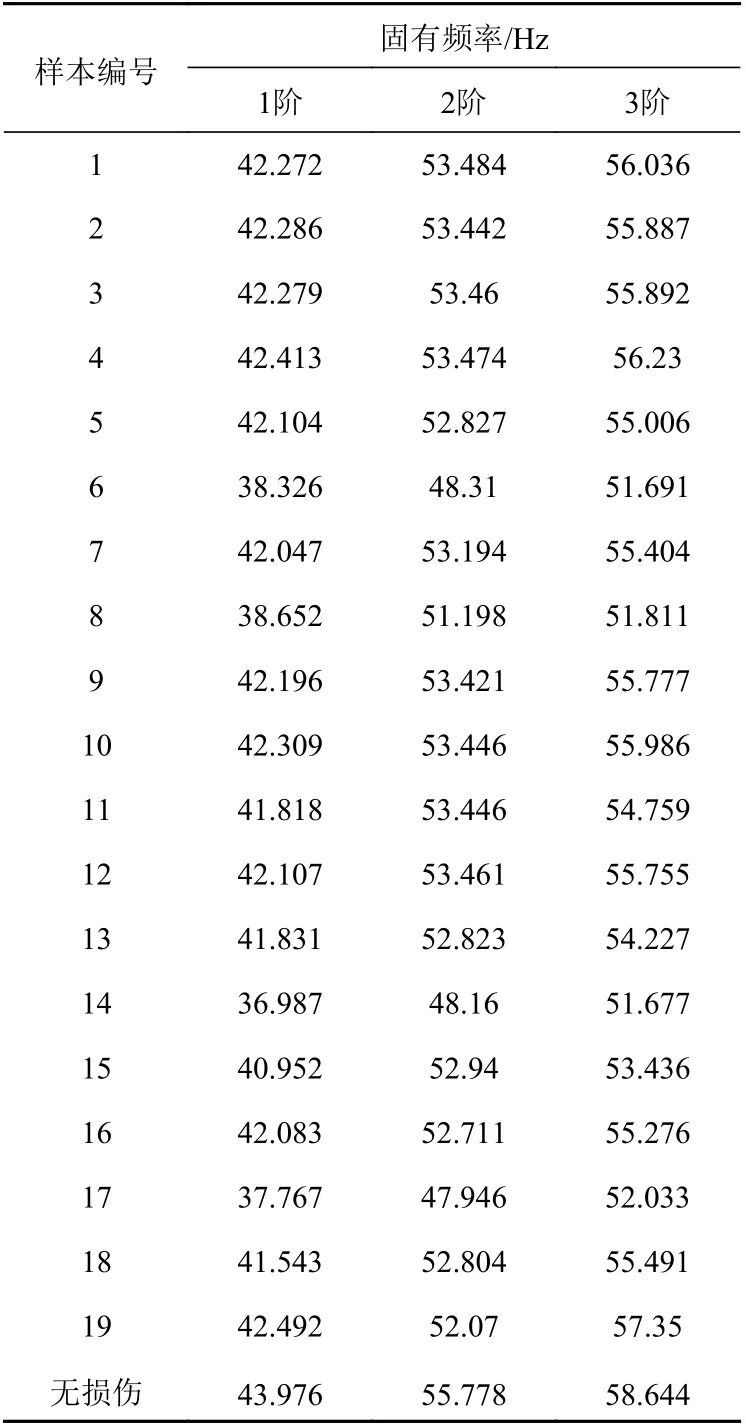
表 2 损伤样本的固有频率Table 2 Natural frequencies of the damaged samples

表 3 测试样本的固有频率Table 3 Natural frequencies of the test samples

图 6 测试样本损伤位置Fig. 6 Damage locations of the test sample

表 4 识别损伤的测试结果Table 4 Test results of damage recognition
测试结果表明,在不考虑对称性的条件下,测试样本识别全部正确。除以上测试样本外,本文还做了大量的测试,因此,基于固有频率和PNN的损伤识别方法是一种有效的加筋板大口径损伤识别方法。
事实上,初次对测试样本1进行测试时识别的结果是损伤3,出现这种现象是因为加筋板模型本身尺寸偏小、结构偏弱。模型在出现损伤样本9这种弱构件受损时,固有频率的变化相对损伤样本3没有预期中的大。但损伤样本3(板格损伤)和损伤样本9(弱构件损伤)这两类损伤对加筋板固有频率的影响不同是一定的。之后,通过对神经网络进行有导师的学习训练,才有了测试样本1的后期识别结果。神经网络在模式识别问题上的优点正是在于它能不断进行自我学习或是有导师期望的学习。
2.4 对称位置的区分
采用结构固有频率作为神经网络输入特征参数的方法不能区别结构本身的对称位置,而本文的加筋板模型在横向和纵向都具有对称性。模型的对称轴将模型分为如图7所示的4个区域(包括测点与激励源位置)。对位于加筋板中心处的损伤,由上文可知可以直接识别得到;而对于其他位置的损伤,则需要对其进行对称区域判断。本文基于激励作用下各测点的加速度信号来判断损伤所在区域。
本文运用有限元软件,在加筋板模型中心处施加正弦激励F(t)=500sin (100πt),并对其进行动力分析。可得到4个测点测得的加速度变化曲线,如图8所示。由图可见,当加筋板无损伤时,4个测点测得的加速度变化曲线非常相近;而当加筋板存在如图7所示的损伤Ⅰ时,测点a处的加速度变化曲线与其他3个测点处的出现了较大区别。由图还可以发现,在损伤Ⅰ的情况下,测点a处的加速度变化曲线与其他测点有较大区别。

图 7 测点布置Fig. 7 Arrangement of measuring points

图 8 4种损伤类型下各测点的加速度曲线Fig. 8 Acceleration curves of each measuring point in the four kinds of damage
得到测点加速度曲线后,取第3个计算周期,即0.04~0.06 s下各测点的加速度数据,时间步长取0.002 s。将加速度数据整理为矩阵的形式:

式中:a1为0.04 s时刻测点a处的加速度;a2为0.042 s时刻测点a处的加速度;a10为0.06 s时刻测点a处的加速度;b1为0.04 s时刻测点b处的加速度;其他项同理。
然后,计算各测点在10个时刻的加速度数据方差Sa1~Sa10,Sb1~Sb10,Sc1~Sc10,Sd1~Sd10,得到如式(12)所示的矩阵。

Sa1表征了0.04 s时刻测点a处加速度数值相比4个测点平均值的偏离程度。这里,定义Wa=(Sa1+…+Sa10)/10,Wa是各时刻测点a处加速度方差的平均值,它表征了整个计算周期内测点a处加速度的总体偏离程度。对测点b,c,d处的加速度数据做相同的计算,可得到Wb,Wc,Wd。Wa,Wb,Wc,Wd这4个值中最大值对应测点的加速度偏离程度最大,所以其所在区域即为损伤存在的区域。表5给出了W值计算结果。
由表5可见,在损伤Ⅰ的情况下Wa远大于Wb,Wc,Wd,不同损伤情况下对应测点处的W值均大于其他3处。因此,W值可有效区别损伤条件下加筋板模型的对称位置。由于W值是基于测点加速度方差得到的,表示的是整个计算周期内某测点处加速度距4个测点平均值的偏离程度,它对测点各时刻加速度数值上的偏差是有累积效应的,所以各测点的W值相差较大,但这并不能简单地推断加速度响应也相差较大。

表 5 W值Table 5 W values
W值在数值上存在差异的原因在于,圆孔形损伤处的网格与无损伤板格处的网格相比更不规则,且各损伤工况的网格是独立划分而非对称镜像得到,所以不能保证不同损伤类型下的网格是一致的,从而导致测点加速度响应也不相同。然而,即便加速度响应相差较大也不会影响辨认损伤的对称位置,这是因为W值是通过一个测点与其他测点速度响应的差异性来完成识别的,其绝对值的大小并不会影响识别结果。
3 结 论
鉴于舰船损伤识别问题存在使用环境、损伤形式、实时处理要求的特殊性,本文将加筋板结构前3阶模态的固有频率作为特征参数输入PNN中训练,进行了加筋板圆孔形穿甲损伤识别的数值仿真研究,通过结合模态特征和加速度方差的结构损伤识别方法,解决了固有频率的对称性识别问题,并得到以下结论:
1) 结构固有频率易测量、精度高,且其测量与测点位置无关;PNN收敛速度快,易于硬件实现,这两者可以很好地吻合舰船结构的损伤识别问题。
2) 结构典型位置的加速度信号易受到损伤的影响,结合模态特征和加速度方差的结构损伤识别方法,可以解决固有频率不能识别结构对称位置的问题。
猜你喜欢
机械传动(2022年10期)2022-10-21
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
舰船科学技术(2022年10期)2022-06-17
舰船科学技术(2021年12期)2021-03-29
电子技术与软件工程(2016年22期)2016-12-26
科技视界(2016年20期)2016-09-29
科技视界(2016年16期)2016-06-29
计算机辅助工程(2012年5期)2012-11-21
环球时报(2009-09-16)2009-09-16
